Файл: Задание Частотнорегулируемого электропривода переменного тока на базе двухзвенного преобразователя частоты.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.01.2024
Просмотров: 40
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рисунок 3.1 – Переходные характеристики при оптимальном значении КП.РТ
По рисунку время переходного процесса 0,002 с. ТКРТ = 0,002/(3…4)=0,6 мс.
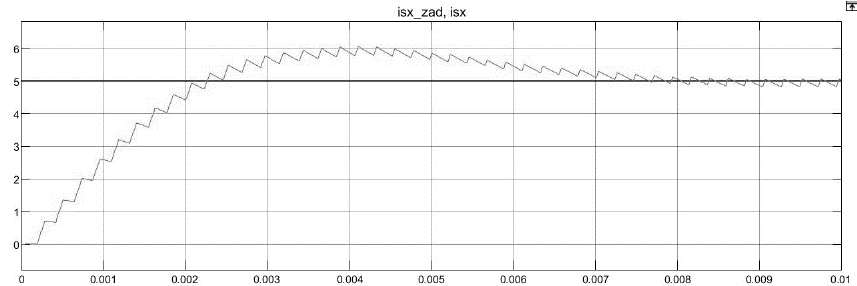
Рисунок 3.2 – Переходные характеристики при КП.РТ 0,25 от опт.
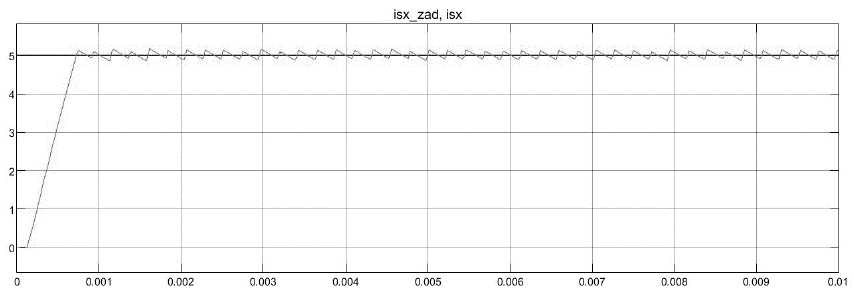
Рисунок 3.3 – Переходные характеристики КП.РТ 4 от опт.
3.2 Настройка контура потокосцепления ротора
Коэффициент датчика потока:

Электромагнитная постоянная времени:


Выбираем постоянную времени РП:

Введем расчетную постоянную времени КРП:


Постоянная времени И-канала РП:


Коэффициент П-канала РП:


Коэффициент И-канала РП:


3.3 Расчет сигнала задания потокосцепления ротора:
Амплитудное значение тока статора в номинальном режиме








Номинальное значение потокосцепления:


Сигнал задания потокосцепления ротора по оси Х:


Время достижения потока номинального значения:


Коэффициент перегрузки по току статора по оси Х:


Из Matlab выбираем оптимальные значения коэффициентов РП:
КП.РП = 400; КИ.РП = 3000; tПП = 0,035 с.
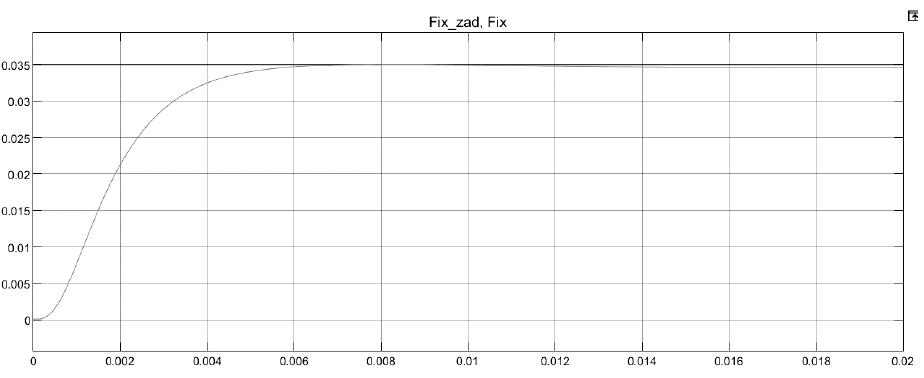
Рисунок 3.4 – Переходный процесс регулятора потока только с П-каналом
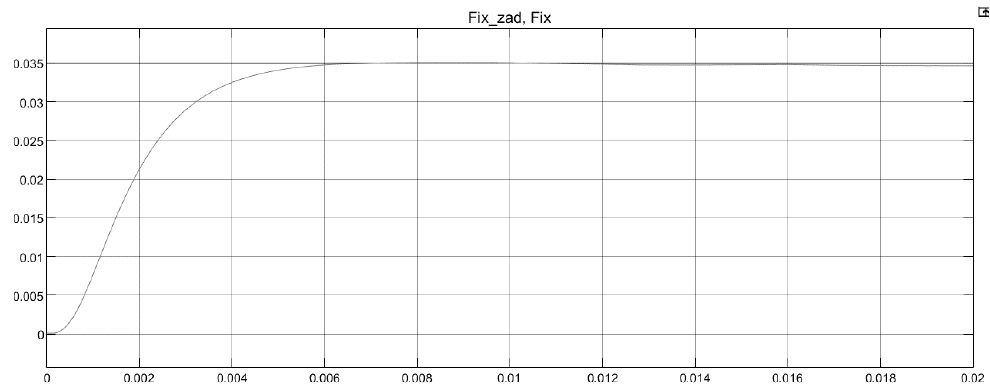
Рисунок 3.5 – Переходный процесс регулятора потока при оптимальных значениях
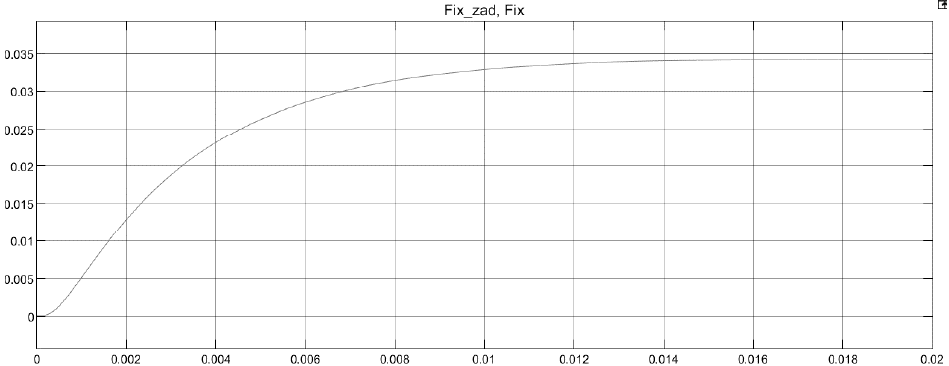
Рисунок 3.6 – Переходные характеристики при КП.РП 0,5 от опт.
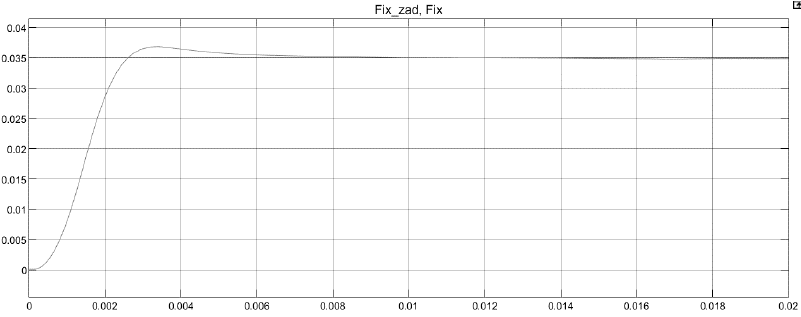
Рисунок 3.7 – Переходные характеристики при КП.РП 2 от опт.
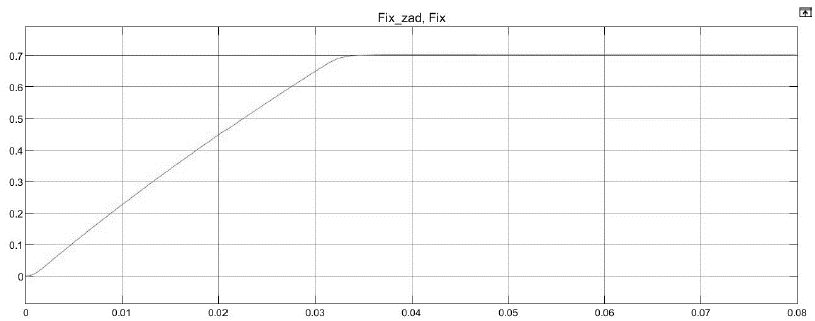
Рисунок 3.8 – Переходные характеристики в «большом»
3.4 Настройка параметров регулятора скорости
Коэффициент цепи обратной связи ДС:


Постоянная времени КРС:


Коэффициент усиления П-канала РС:

Из Matlab выбираем оптимальное значение П-канала РС:
КП.РС = 5; ТКРТ = 1,5…2 мс.
Оптимальное значение постоянной времени КРС

Частота среза КРС:


Расчет уставки максимального момента в БО регулятора скорости:


Номинальный сигнал задания:


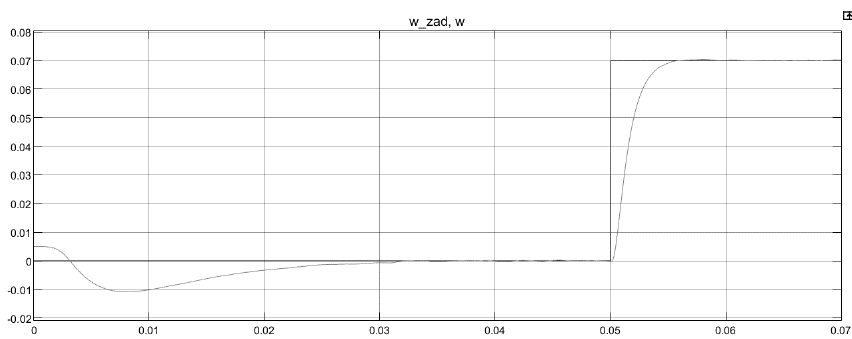
Рисунок 3.9 – Переходный процесс регулятора скорости при оптимальных
Значениях
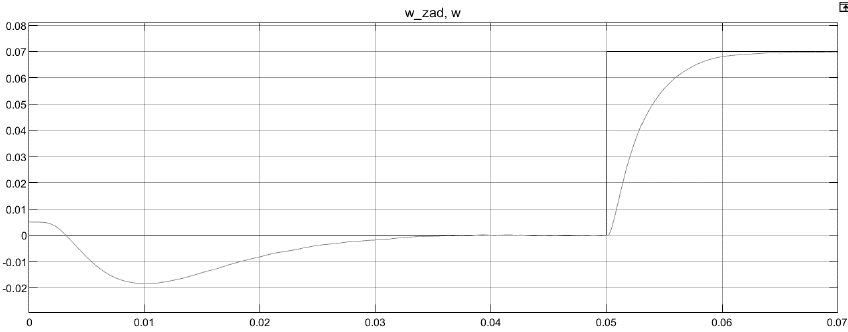
Рисунок 3.10 – Переходный процесс регулятора скорости при КП.РС 0,5 от опт.
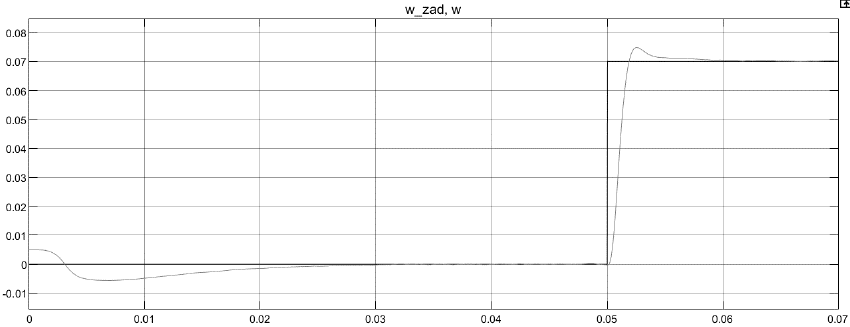
Рисунок 3.11 – Переходный процесс регулятора скорости при КП.РС 2 от опт.
IV. ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ УПРАВЛЕНИЕМ
4.1 Динамические характеристики (реактивный момент)
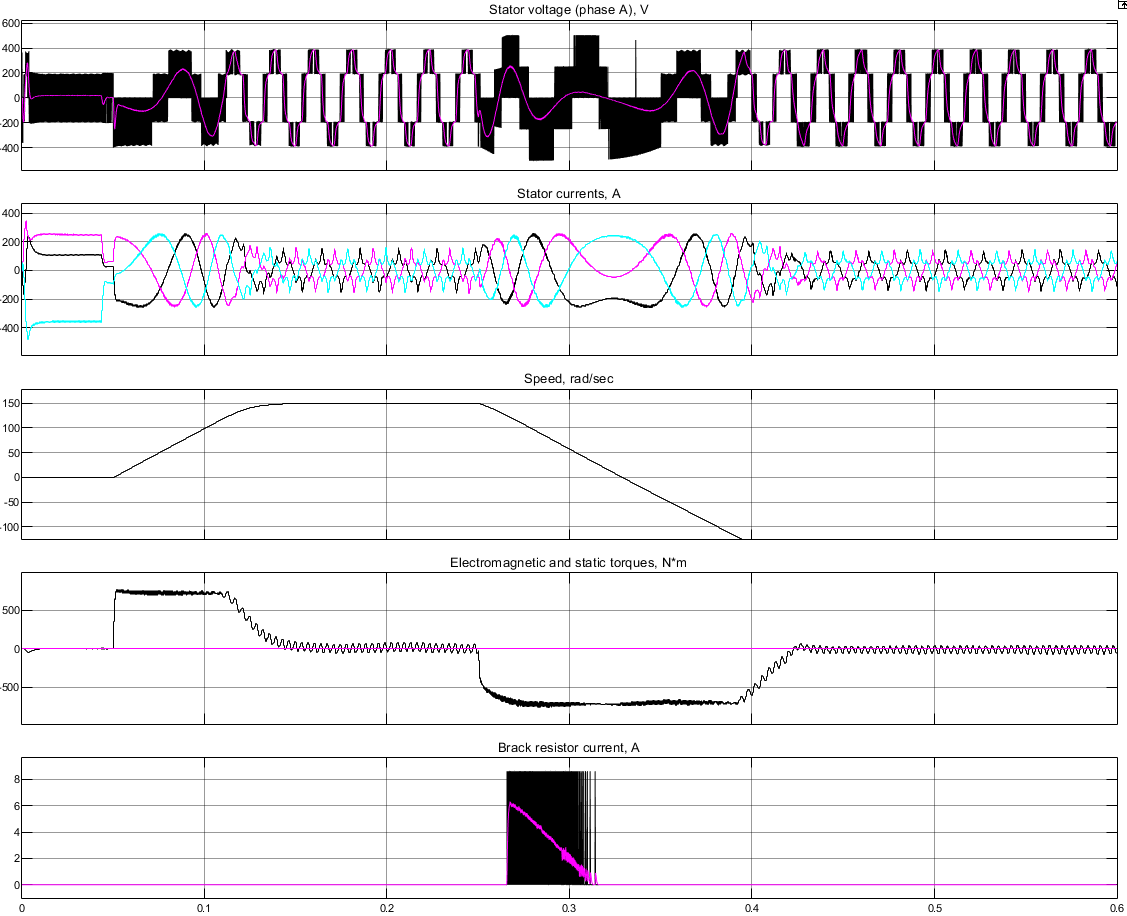
Рисунок 4.1 – Динамические характеристики при разгоне и реверсе на холостом ходу без ЗИ
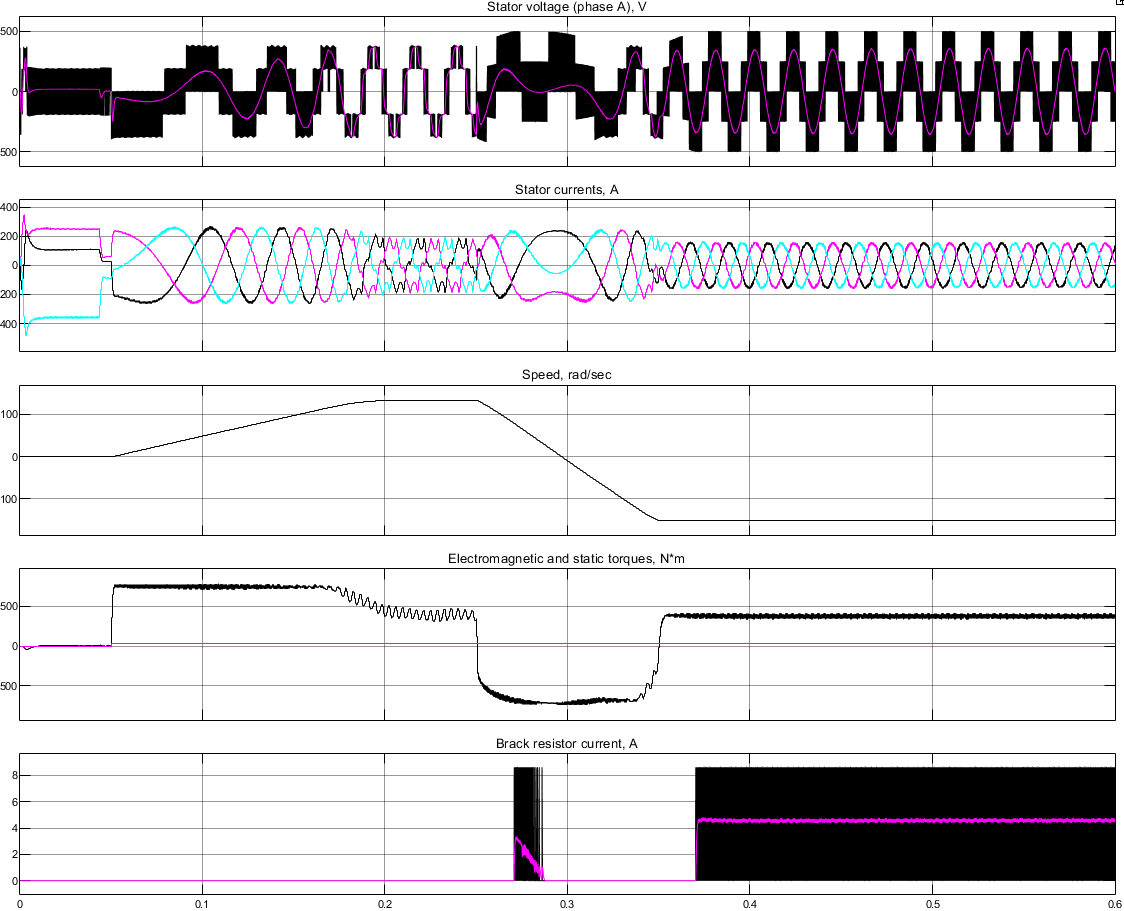
Рисунок 4.2 – Динамические характеристики при разгоне и реверсе с номинальной нагрузкой без ЗИ
4.2 Механические характеристики
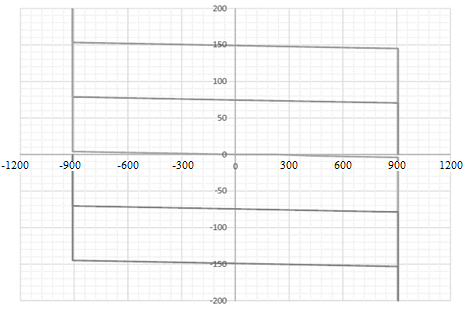
Рисунок 4.3 - Механические характеристики
Список литературы
1. Системы управления электроприводов: учебник для вузов / В.М. Терехов, О.И. Осипов; под. ред. В.М. Терехова. – 2-е изд., стер. – М.: Издательский центр «Академия», 2006. – 304 с.
2. Анучин, А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.
3. Асинхронные двигатели серии 4А: Справочник / А.Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская . – М.: Энергоиздат, 1982. – 504 с.
4. Герман-Галкин, С.Г. Matlab & Simulink / Проектирование механотронных систем на ПК / С.Г. Герман-Галкин. – СПб.: КОРОНА Век, 2008. – 368 с.
5. Черных, И.В. SIMULINK: среда создания инженерных приложений / И.В. Черных. – М.: ДИАЛОГ–МИФИ, 2003. – 496 с.