ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.07.2024
Просмотров: 11
Скачиваний: 0
Моделирование динамики электрического привода ВН
Hазработка математической модели привода.
Математическая модель привода включает в себя математическую модель исполнительного двигателя и математическую модель пушки. Математическая модель силовой части составлена с учетом того, что реактивная составляющая магнитного потока статора полностью скомпенсирована.
а) Математическая модель исполнительного двигателя.
Уравнения баланса напряжений в цепи статора
 ,
(21)
,
(21)
где
![]() – эквивалентное напряжение управления
на статорных обмотках;
– эквивалентное напряжение управления
на статорных обмотках;
![]() – управляющий
ток в цепи статора;
– управляющий
ток в цепи статора;
![]() – противоэдс
от вращения якоря в статорных обмотках;
– противоэдс
от вращения якоря в статорных обмотках;
![]() .
.
б) Математическая модель пушки, как объекта стабилизации.
Рассмотрим пушку совместно с якорем исполнительного электродвигателя и редуктором в виде трехмассовой модели (рисунок 6) [3].
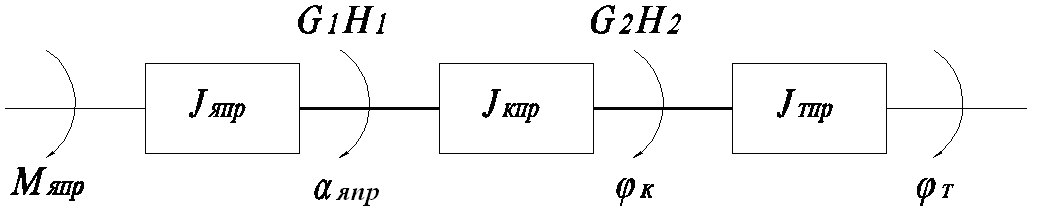
Рисунок - Трехмассовая модель пушки совместно с якорем
исполнительного электродвигателя и редуктором.
![]() – приведенный
угол поворота вала двигателя;
– приведенный
угол поворота вала двигателя;
![]() – угол
поворота казенника пушки;
– угол
поворота казенника пушки;
![]() – угол
поворота объекта регулирования;
– угол
поворота объекта регулирования;
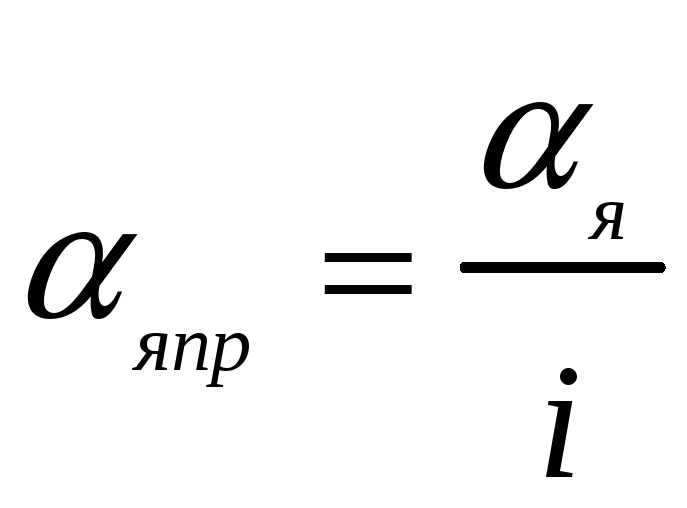 ,
(22)
,
(22)
где
![]() - угол поворота якоря двигателя;
- угол поворота якоря двигателя;
![]() -
передаточное число редуктора.
-
передаточное число редуктора.
Исходя из вышеизложенного, составлена система уравнений:
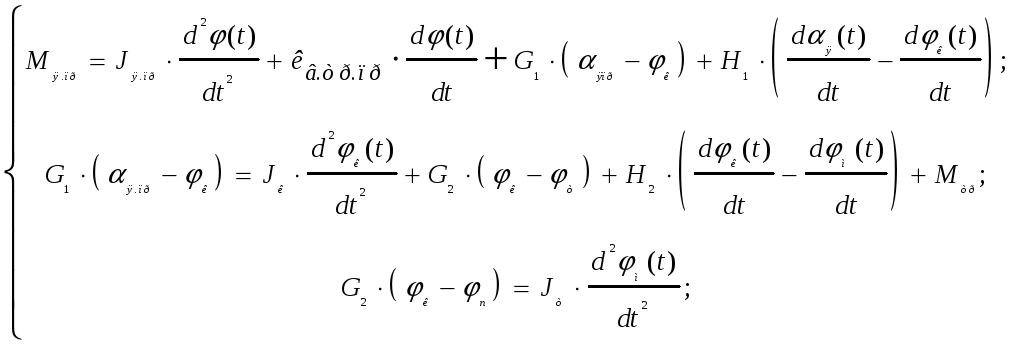 (23)
(23)
где
![]() ;
кв.тр.пр=
кв.тр*i2
;
кв.тр.пр=
кв.тр*i2
![]() – момент,
развиваемый двигателем;
– момент,
развиваемый двигателем;
![]() – момент
трения на оси объекта регулирования;
– момент
трения на оси объекта регулирования;
![]() – коэффициент
жесткости, соответственно, редуктора
и пушки;
– коэффициент
жесткости, соответственно, редуктора
и пушки;
![]() – коэффициент
диссипативных потерь, соответственно,
в редукторе и пушке.
– коэффициент
диссипативных потерь, соответственно,
в редукторе и пушке.
Для всестороннего исследования характеристик электропривода и, в частности, анализа влияния параметров механического подъемника на точность стабилизации в соответствии с уравнениями (21) - (23), а также с учетом имеющихся в приводе и объекте нелинейностей, разработана имитационная модель и проведено моделирование, результаты которого приведены ниже.
Rя=0,2 Ом, Lя= 0,0005 Гн, С=0,5, I = 500, кв.тр= Jя= 0,001 кгм2, Jк= 2000 кгм2 , Jтр= 3000 кгм2, G1=5000000 Нм/рад, G2= 11000000 Нм/рад, H1 =40000 Нмс/рад, H2 =50000 Нмс/рад.