ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 192
Скачиваний: 0
СОДЕРЖАНИЕ
Обработка результатов измерений
Изучение законов кинематики прямолинейного равнопеременного движения
Обработка результатов измерений
Обработка результатов измерений
Изучение основного закона динамики вращательного движения
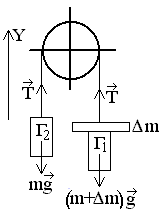
Натяжение нити т можно определить по уравнению движения груза:
Упражнение 1. Проверка второго закона Ньютона для вращательного движения.
Контрольные вопросы
Какие измерения называются прямыми, а какие – косвенными?
Какие погрешности называются случайными, а какие – систематическими?
Дать определение абсолютной и относительной погрешностей измерения.
Как определяются погрешности прямых единичных измерений?
Как определяются погрешности прямых многократных измерений?
Как определяется погрешность косвенных измерений (оба способа)?
Правила округления результатов.
Лабораторная работа № 1.2
Изучение законов кинематики прямолинейного равнопеременного движения
Цель работы:определение ускорения и конечной скорости тела при равноускоренном движении
Введение
Кинематика– это раздел механики, изучающий движение тел вне зависимости от причин, обусловливающих это движение. Изменение положения тела относительно других тел называетсямеханическим движением. Любое механическое движение можно разложить на два простейших: поступательное и вращательное.Поступательнымназывается движение, при котором все точки тела двигаются по параллельным линиям, совершая одинаковые перемещения.Вращательнымназывается движение, при котором все точки тела двигаются по окружностям, лежащим в параллельных плоскостях с центрами на одной прямой, называемой осью вращения. В данной лабораторной работе будем рассматривать поступательное движение.
Рассмотрим основные характеристики этого движения.
1. Траектория – это линия, по которой движется тело. По виду траектории движение делят на прямолинейное и криволинейное.
2. Путь – это длина траектории от начального до конечного положения тела.
3. Перемещение – это вектор, соединяющий две точки траектории в направлении движения тела.
4. Скорость – это
векторная физическая величина
![]() ,
характеризующая быстроту изменения
положения тела в пространстве с течением
времени:
,
характеризующая быстроту изменения
положения тела в пространстве с течением
времени:
![]() ,
,
где
![]() – радиус-вектор, проведенный из начала
координат в рассматриваемую точку.
– радиус-вектор, проведенный из начала
координат в рассматриваемую точку.
Скорость бывает средняя и мгновенная. Средняя скорость – это отношение пройденного пути ко времени, за которое этот путь был пройден:
![]() .
.
Мгновенная скорость – это первая производная радиус-вектора по времени:
![]() .
(1)
.
(1)
5. Ускорение – это быстрота изменения скорости с течением времени:
![]() .
.
Мгновенное ускорение – это первая производная мгновенной скорости по времени или вторая производная радиус-вектора по времени:
![]() .
(2)
.
(2)
По функции
зависимости
![]() =
=![]() (t)
движение делят на равномерное (
(t)
движение делят на равномерное (![]() =
0), равнопеременное (
=
0), равнопеременное (![]() =const) и переменное (
=const) и переменное (![]() ≠const). В этой работе будем
рассматривать прямолинейное равнопеременное
движение. Равнопеременным называется
движение, при котором скорость тела за
равные промежутки времени изменяется
на одну и ту же величину. Выведем законы
равнопеременного движения.
≠const). В этой работе будем
рассматривать прямолинейное равнопеременное
движение. Равнопеременным называется
движение, при котором скорость тела за
равные промежутки времени изменяется
на одну и ту же величину. Выведем законы
равнопеременного движения.
Из уравнения (2) выразим скорость тела:
![]() .
.
Проинтегрируем
это выражение по времени при условии,
что при t= 0,![]() .
.
![]()
![]()
или ![]() (3)
(3)
Выражение (3) называется законом изменения скорости при равнопеременном движении.
Из уравнения (1) выразим перемещение:
![]() .
.
Подставим в это выражение уравнение (3) и проинтегрируем по времени при условии, что при t= 0,r=r0.
![]()
![]()
или ![]() .
(4)
.
(4)
Выражение (4) называют законом равнопеременного движения.
При прямолинейном
движении модуль вектора перемещения
совпадает с длиной пути (![]() )
при неизменном направлении вектора
скорости. Равнопеременное движение
делится на два вида: равноускоренное и
равнозамедленное. При равноускоренном
движении вектора скорости и ускорения
сонаправлены (
)
при неизменном направлении вектора
скорости. Равнопеременное движение
делится на два вида: равноускоренное и
равнозамедленное. При равноускоренном
движении вектора скорости и ускорения
сонаправлены (![]() ),
а при равнозамедленном – направлены в
противоположные стороны (
),
а при равнозамедленном – направлены в
противоположные стороны (![]() ).
Тогда в проекции на выбранную ось
уравнения (3) и (4) будут иметь вид:
).
Тогда в проекции на выбранную ось
уравнения (3) и (4) будут иметь вид:
а) для равноускоренного движения
 (5)
(5)
или
 ;
;
б) для равнозамедленного движения
 или
или
 ,
,
где х– координата точки по выбранной оси.
Рассмотрим подробнее систему уравнений (5). Решая эту систему, можно получить новые зависимости:
![]() или
или
![]() .
.
Если наложить
условие, что при t= 0,![]() их0 = 0 (т.е. начало координат
совпадает с начальным положением тела),
то при неизменном направлении вектора
скоростих=S, гдеS– путь пройденный
телом. Тогда эти уравнения примут вид:
их0 = 0 (т.е. начало координат
совпадает с начальным положением тела),
то при неизменном направлении вектора
скоростих=S, гдеS– путь пройденный
телом. Тогда эти уравнения примут вид:
![]()
или
![]() ,
(6)
,
(6)
а сама система примет вид:
 .
(7)
.
(7)
Из формулы (6) получим выражение для конечной скорости в зависимости от пройденного пути и времени в проекции на ось Х:
![]() .
(8)
.
(8)
Из системы уравнений (7) получим выражение для ускорения в зависимости от пройденного пути и времени:
![]() .
(9)
.
(9)
Описание установки
Установка включает в себя машину Атвуда, электронный блок и набор перегрузков.
Общий вид установки изображен на рис. 1. Установка состоит из основания 2, на вертикальной стойке1которого размещены верхний5, средний4и нижний3кронштейны. На верхнем кронштейне5крепится блок, через который перекинута нить6с грузамиГ1иГ2одинаковой массы. Электромагнит7с помощью фрикциона удерживает блок в неподвижном состоянии. На среднем кронштейне4установлен фотодатчик8, подающий сигнал для окончания счета времени движения грузов. Средний кронштейн имеет индекс, положение которого совпадает с оптической осью фотодатчика (риска на корпусе). На площадке нижнего кронштейна3имеется амортизатор для остановки груза. Кронштейны3и4могут свободно перемещаться и фиксироваться на вертикальной стойке1по всей ее свободной длине. По миллиметровой линейке9определяют начальное и конечное положение грузов и пройденный ими путь.
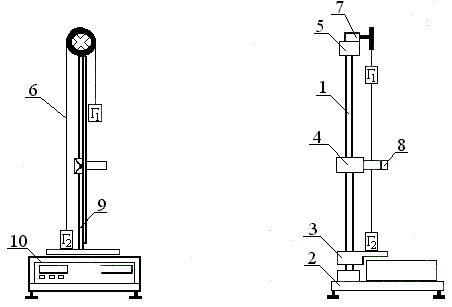
Рис. 1. Общий вид установки
На передней панели электронного блока 10 имеются индикаторы “ПЕРИОД”, “ВРЕМЯ”, кнопки управления: “СБРОС”, “ПУСК”, “СТОП” и кнопка “СЕТЬ”, которая включает питание блока10. При нажатии на кнопку “СБРОС” происходит обнуление цифровых индикаторов “ПЕРИОД” и “ВРЕМЯ”. ГрузГ1фиксируется нажатием кнопки “СТОП” на заданной высоте. При нажатии кнопки “ПУСК” грузы начинают двигаться, а таймер отсчитывает время; при пересечении правым грузом оптической оси фотодатчика счет времени прекращается, а на цифровом индикаторе “ВРЕМЯ” высвечивается время равноускоренного движения груза. Для нового запуска следует сначала поднять грузГ1на необходимую высоту, нажать кнопки “СБРОС ”и “СТОП”, а затем – кнопку “ПУСК”.
Рис.2. Схема подвески
грузов
с
перегрузком