ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.10.2024
Просмотров: 113
Скачиваний: 0
СОДЕРЖАНИЕ
Выбор предохранителей производится:
Выбор тепловых реле производится:
Выбор автоматических выключателей производится :
Указания и порядок выполнения работы.
Лабораторная работа № 2 исследование характеристик двигателей постоянного тока
Основные теоретические положения.
Указания и порядок выполнения работы.
Лабораторная работа № 3 исследование характеристик асинхронного двигателя с короткозамкнутым ротором
Основные теоретические положения.
Указания и порядок выполнения работы.
Лабораторная работа № 4 режимы пуска и динамического торможения асинхронных электродвигателей
При помощи мегомметра можно определить выводы, принадлежащие каждой обмотке. В этом случае при проведении измерений прибор покажет нулевое значение сопротивления цепи, т.е. «короткое», только для тех двух выводов, которые принадлежат одной и той же обмотке. Но определить начало – конец обмотки при помощи мегомметра нельзя.
Выводы обмоток можно также определить при помощи вольтметра или сигнальной лампочки на постоянном или переменном токе, выполнив проверку электрической цепи согласно схемам, приведенным на рис.4.2.
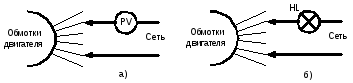
Рис. 4.2. Схемы определения выводов обмоток электродвигателя: а) – при помощи вольтметра; б) – при помощи сигнальной лампочки.
Для определения выводов обмоток двигателя при помощи вольтметра собирают электрическую схему согласно рис. 4.2а. Провод, идущий от сети, подсоединяют к одному из шести выводов обмоток статора. Проводом, идущим от вольтметра – PV, поочередно прикасаются к остальным выводам. Только в одном случае вольтметр покажет напряжение, равное напряжению сети, - следовательно, эти выводы принадлежат одной обмотке, а в остальных случаях его показания будут равны нулю.
Считая найденную обмотку первой и произвольно присвоив ее выводам значения С1 и С4, переходят аналогично к поиску оставшихся двух обмоток. Для определения выводов обмоток двигателя при помощи сигнальной лампочки собирают электрическую схему согласно рис. 4.2б). Поиск обмоток выполняется аналогично предыдущей схеме – в момент свечения сигнальной лампочки HL фиксируют выводы, принадлежащие одной обмотке.
Зная принадлежность выводов всех обмоток, следует перейти к определению их начала и конца. Для АД небольшой мощности (до 5 кВт) разрешается применять метод подбора, так называемый монтёрский метод. Суть этого метода заключается в том что, определив принадлежность выводов для каждой из трех обмоток статора, собирают схему соединения «звезда». Электродвигатель включают в сеть и наблюдают за его работой. Если электродвигатель работает нормально (без вибраций и развивает номинальную угловую скорость), то это означает, что в общую точку 0 попали все «концы» или «начала», т.е. его обмотки соединены согласованно. Если электродвигатель не развивает номинальной угловой скорости и его работа сопровождается рокотом – это означает, что одна из фаз оказалась «перевернутой», т.е. одна из обмоток статора включена несогласованно с другими двумя обмотками.
Следующим шагом надо поменять местами «начало» – «конец» первой обмотки и опять включить электродвигатель в сеть. Если вновь окажется несогласованное включение обмоток, то, отключив двигатель от сети, надо восстановить первоначальное положение «начало» – «конец» первой обмотки. Затем меняют местами «начало» – «конец» второй обмотки и включают электродвигатель в сеть. При необходимости эту операцию повторяют с третьей обмоткой электродвигателя.

Если две обмотки, подсоединенные последовательно, включены согласованно - рис.4.3а, то вольтметр, подключенный к третьей свободной обмотке, не покажет напряжения.
Если две обмотки включены несогласованно – рис.4.3б, то вольтметр покажет наличие напряжения на третьей обмотке. Далее опыт повторяют аналогично рассмотренному, поменяв местами между собой третью и любую из двух первых обмоток.
Наиболее распространенными в промышленности и сельском хозяйстве АД являются двигатели, рассчитанные на напряжение сети 380 / 220 В и со схемой соединения обмоток статора «звезда» - рис. 4.1б).
Механическая характеристика АД с короткозамкнутым ротором – ω = f(M) и его электромеханическая характеристика – ω = f(I) в двигательном режиме работы приведены на рис. 4.4а, где ωо – угловая скорость вращения электромагнитного поля; ωк – критическая угловая скорость, соответствующая максимальному моменту двигателя – Мк; Мп – пусковой момент двигателя; Iп – пусковой ток в обмотке статора.
Для АД с фазным ротором аналогичные характеристики приведены на рис. 4.4б, где «ЕМХ» - естественные характеристики построены при добавочном сопротивлении в цепи ротора Rр = 0, а для искусственных характеристик - R2 > R1.
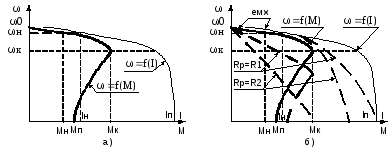
Рис. 4.4. Характеристики асинхронного двигателя
а) – с короткозамкнутым ротором; б) – с фазным ротором.
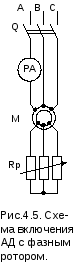
Принципиальная схема включения АД с фазным ротором приведена на рис. 4.5, где Q – рубильник; РА – амперметр; М – АД с фазным ротором; Rр – трехфазный пусковой реостат. В качестве пусковых реостатов применяют: металлические масляные реостаты (для двигателей мощностью до 4 кВт); водяные реостаты (для двигателей мощностью десятки кВт). Изменяя сопротивления в цепи ротора можно также регулировать угловую скорость вращения ротора (рис.4.4б). Однако для регулирования скорости вращения в рабочем режиме нельзя использовать пусковые реостаты, т.к. они рассчитаны только на кратковременный режим работы под нагрузкой. Для этих целей необходимо использовать реостаты, предназначенные для длительного режима работы.
Для оборудования, требующего быстрой остановки или позиционирования, применяется режим динамического торможения АД. При переводе АД в режим динамического торможения его обмотки статора отключаются от электрической сети. В этом случае в двигателе остается лишь незначительный магнитный поток от остаточного намагничивания в стали статора. В роторе, вращающемся под действием запасенной кинетической энергии, этот поток наводит ЭДС и в нем возникает ток. Однако, из-за их малости, взаимодействие тока ротора и остаточного магнитного потока статора не могут создать сколько-нибудь значительного тормозного момента.
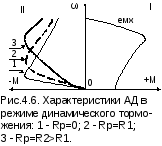
Для получения эффективного тормозного момента необходимо увеличить значение магнитного потока статора. Это может быть достигнуто подачей постоянного тока в обмотки статора или подключением к ним конденсаторов. В первом случае будет иметь место режим динамического торможения с независимым возбуждением, во втором – с самовозбуждением. Наибольшее распространение ввиду их высокой эффективности получили схемы динамического торможения АД с независимым возбуждением. Механические характеристики АД в двигательном режиме работы (квадрант I) и в режиме динамического торможения с независимым возбуждением (квадрант II) при различных сопротивлениях в цепи ротора (Rp) приведены на рис. 4.6.
Указания и порядок выполнения работы.
1. Ознакомиться со стендом лабораторной установки. При помощи мегомметра проверить сопротивления изоляции обмоток АД с короткозамкнутым ротором и определить пригодность включения его в сеть. Сначала надо измерить сопротивления изоляции между каждыми из 6 выводов обмоток статора и корпусом двигателя, а затем попарно между всеми выводами. Данные записать в таблицу 4.4.
Таблица 4.4.
|
R из |
Вывод-корпус |
Вывод-вывод |
||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
1.2 |
1.3 |
1.4 |
1.5 |
1.6 |
2.3 |
2.4 |
2.5 |
2.6 |
3.4 |
3.5 |
3.6 |
4.5 |
4.6 |
5.6 |
||
|
кОм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Найти выводы всех трех обмоток фаз статора для АД с короткозамкнутым ротором при помощи вольтметра - рис. 4.2а или сигнальной лампочки – рис. 4.2б. Полученные результаты сравнить с данными табл. 4.4.