ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.10.2024
Просмотров: 76
Скачиваний: 0
СОДЕРЖАНИЕ
Лабораторная работа № 6 типовые схемы управления асинхронными элетродвигателями
Указания и порядок выполнения работы
Основные теоретические положения
Указания и порядок выполнения работы
Указания и порядок выполнения работы
Лабораторная работа № 10 управление многоскоростными асинхронными электродвигателями
Основные теоритические положения
Технологическая схема содержит (рис. 8.2, b): 1 - асинхронный двигатель; 2 — транспортер; 3 — бункер; 4 — весоизмерительный механизм; 5 - возвратную пружину; 6 - конечный выключатель. После включения двигателя 1 транспортером 2 осуществляется подача продукции (например кормов или зерна) в бункер 3. При его заполнении измерительный механизм 4 воздействует на выключатель 6, который подает сигнал на отключение двигателя 1. При опорожнении бункера 3 за счет воздействия пружины 5 механизм 4 приводится в первоначальное положение и выключатель 6 возвращается в исходное состояние.
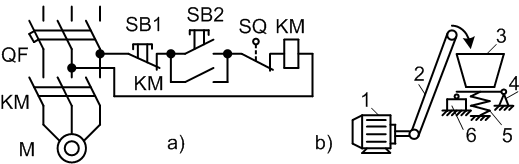
Рис. 8.2. Схемы управления транспортером:
а – принципиальная электрическая; b - технологическая
Принципиальная электрическая схема управления транспортёром содержит (рис. 8.2, а): М - асинхронный электродвигатель с короткозамкнутым ротором; КМ - силовые контакты магнитного пускателя, подающего напряжение питания на обмотки статора; QF - автоматический выключатель, защищающий электродвигатель от ненормальных и аварийных режимов работы; SB1, SB2 - кнопки управления, соответственно «Стоп» и «Пуск», включающих и отключающих катушку КМ; замыкающийся блокировочный контакт — KM; SQ - размыкающийся контакт конечного выключателя.
Схема управления асинхронным электродвигателем с использованием реле конечного выключателя работает следующим образом (рис. 8.2 а):
в исходном состоянии подано напряжение питания и автоматический выключатель QF включен; кнопки SB1 (замкнута), SB2 (разомкнута) не нажаты; катушка КМ пускателя обесточена; двигатель М отключен от сети (т. е. не вращается); контакты SQ конечного выключателя замкнуты;
при кратковременном нажатии кнопки «Пуск» - SB2 на катушку КМ через цепь SB1, SB2, SQ подается напряжение питания и она срабатывает; замыкающиеся блок-контакты КМ шунтируют контакты кнопки SB2 и после этого ее можно отпускать; через силовые контакты КМ подается напряжение питания на обмотки статора электродвигателя М; при вращении электродвигателя М и наполнении бункера срабатывает выключатель SQ и его контакты размыкаются; катушка КМ обесточивается и электродвигатель М отключается;
при кратковременном нажатии кнопки «Стоп» - SB1 производится разрыв по цепи питания катушки КМ, она отключается, обесточивает электродвигатель М независимо от срабатывания выключателя SQ.
На рис. 8.3. показаны принципиальная электрическая (а) и технологическая (b) схемы управления электродвигателем подвесной тележки, служащей для раздачи кормов (аналогичную технологическую схему имеет облучательная установка).
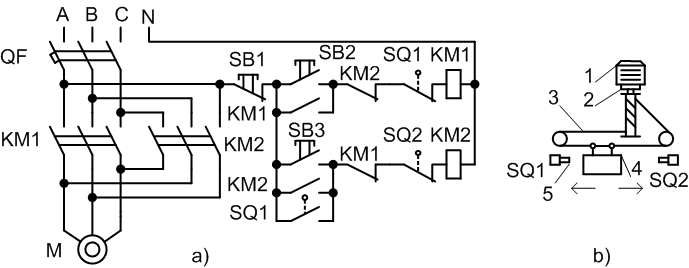
Рис. 8.3. Схемы управления подвесной тележкой:
а – принципиальная электрическая; b - технологическая
Технологическая схема содержит (рис. 8.3 Ь): 1 - асинхронный двигатель; 2 - барабан; 3 - транспортный трос; 4 - тележку; 5 — конечные выключатели, ограничивающие величину перемещения тележки соответственно влево (SQ1) и вправо (SQ2). Принцип работы установки следует из рисунка. По командам выключателей 5 осуществляются реверс двигателя 1 - конечный выключатель SQ1 или его остановка - конечный выключатель SQ2.
Принципиальная электрическая схема управления подвесной тележкой содержит (рис. 8.3 а): М - асинхронный электродвигатель с короткозамкнутым ротором; КМ1, КМ2 - силовые контакты магнитных пускателей, подающих напряжение питания на обмотки статора и обеспечивающих вращение двигателя в рабочем направлении и его реверс соответственно; QF - автоматический выключатель, защищающий электродвигатель от ненормальных и аварийных режимов работы; три фазы питающего напряжения переменного тока - А, В, С; SB1, SB2, SB3 - кнопки управления, соответственно «Стоп», «Пуск влево» и «Пуск вправо», включающих и отключающих катушки КМ1 и КМ2; блокировочные контакты - КМ1, КМ2; SQ1, SQ2 размыкающиеся и замыкающийся контакты конечных выключателей, ограничивающих перемещение соответственно влево и вправо.
Схема управления асинхронным электродвигателем подвесной тележкой с использованием конечных выключателей работает следующим образом (рис. 8.3, а):
в исходном состоянии подано напряжение питания на фазы А,В,С; автоматический выключатель QF включен; кнопки SB1 (замкнута), SB2 (разомкнута), SB3 (разомкнута) не нажаты; катушки КМ1, КМ2 пускателей обесточены; двигатель М отключен от сети (т. е. не вращается); выключатели SQ1, SQ2 находятся в исходном состоянии (оно соответствует изображенному на схеме);
при кратковременном нажатии кнопки «Пуск влево» - SB2 на катушку КМ1 через цепь SB1, SB2, КМ2, SQ1 подается напряжение питания и она срабатывает; замыкающиеся блок-контакты КМ1 шунтируют контакты кнопки SB2 и после этого ее можно отпускать; через силовые контакты КМ1 подается напряжение питания на обмотки статора электродвигателя М одновременно размыкающиеся блок-контакты КМ1 разрывают цепь питания катушки, КМ2; электродвигатель М включается и перемещает тележку влево;
при достижении тележкой, крайнего левого положения и срабатывании выключателя SQ1 его размыкающиеся контакты обесточивают катушку КМ1, отключая электродвигатель М от сети; замыкается блок-контакт КМ1 в цепи питания катушки КМ2; по цепи SB1, SQ1, КМ1, SQ2 подается напряжение питания на катушку КМ2 и она срабатывает; замыкающиеся блок-контакты КМ2 шунтируют контакты SB1, SQ1; размыкающиеся блок-контакты КМ2 разрывают цепь питания катушки КМ1; электродвигатель М включается на реверс и перемещает тележку вправо;
при достижении тележкой крайнего правого положения и срабатывании выключателя SQ2 его размыкающиеся контакты обесточивают катушку KМ2, отключая электродвигатель М от сети; замыкается блок-контакт КМ2 в цепи питания катушки КМ2; схема возвращается в исходное состояние;
при кратковременном нажатии кнопки «Стоп» - SB1 производится разрыв по цепи питания катушки КМ1 (или КМ2), она отключается, обесточивает электродвигатель М, размыкается блок-контакт КМ1 (или КМ2) и замыкается блок-контакт КМ1 (или КМ2) в цепи питания катушки КМ2 (или КМ1); эта команда используется, как правило, при аварийной остановке тележки;
в случае аварийной остановки тележки ее возврат в исходное состояние осуществляется вручную - при помощи кнопки «Пуск вправо», т.е. SB3; работа схемы в этом случае аналогична срабатыванию выключателя SQ1.
На рис. 8.4 приведена принципиальная электрическая схема управления кормораздатчиком. Она содержит: М - асинхронный электродвигатель с короткозамкнутым ротором; КМ1, КМ2 - силовые контакты магнитных пускателей, подающих напряжение питания на обмотки статора и обеспечивающих вращение двигателя в рабочем направлении и его реверс соответственно; QF - автоматический выключатель, защищающий электродвигатель от ненормальных и аварийных режимов работы; три фазы питающего напряжения переменного тока - А, В, С и нулевой провод - N; SВ1, SB2, SB3 - кнопки управления, соответственно «Стоп», «Пуск влево» и «Пуск вправо», включающих и отключающих катушки КМ1 и КМ2; блокировочные контакты - КМ1, КМ2; SQ1, SQ2 - размыкающиеся и замыкающийся контакты конечных выключателей, ограничивающих перемещение соответственно влево и вправо; КТ - реле выдержки времени, обеспечивающее работу схемы в циклическом режиме.
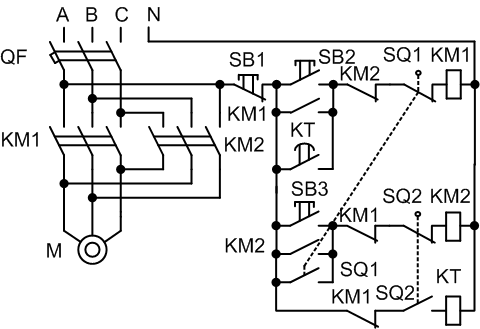
Рис. 8.4. Схема управления кормораздатчиком
Работа схемы управления кормораздатчиком (рис.8.4) в целом аналогична работе схемы управления подвесной тележкой (рис. 8.3). Только по завершении полного цикла работы (автоматическое отключение электродвигателя М) по цепи КМ1, SQ2 получает питание катушка электромеханического реле времени КТ. Через заданное время (например 3 часа) реле КТ сработает и замкнет свои контакты в цепи катушки КМ1, что равносильно нажатию кнопки «Пуск влево», и полный цикл работы автоматически повторится вновь.
Указания и порядок выполнения работы
1. Ознакомиться с электрооборудованием лабораторного стенда и конструкцией конечного выключателя.
2. Собрать схему управления электродвигателем транспортера (рис. 8.2 а) и проверить ее работу.
3. Собрать схему управления электродвигателем подвесной тележки (рис. 8.3 а). Проверить работу схемы при всех технологически возможных режимах.
4. Собрать схему управления электродвигателем кормораздатчика (рис. 8.4). Исследовать ее режимы работы и составить временную диаграмму для одного рабочего цикла кормораздачи.
Лабораторная работа № 10 управление многоскоростными асинхронными электродвигателями
ЦЕЛЬ РАБОТЫ. Изучить принцип действия и исследовать работу схем управления многоскоростными асинхронными электродвигателями.
ПРОГРАММЫ РАБОТЫ.
1. Изучить принцип действия многоскоростных асинхронных электродвигателей.
2. Изучить схемы управления многоскоростными асинхронными электродвигателями.
3. Исследовать работу схемы управления 3-скоростным асинхронным электродвигателем.
Основные теоритические положения
Многоскоростные асинхронные электродвигатели с короткозамкнутым ротором (АД) применяются для ступенчатого регулирования угловой скорости вращения в металлообрабатывающих станках и некоторых сельскохозяйственных машинах. Из выражения для угловой скорости вращения АД
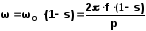
следует, что угловую скорость можно регулировать, изменяя число пар полюсов р, если задана частота питающейся сети f и мало изменяется скольжение s. Так как число пар полюсов р может быть только целым числом, то регулирование угловой скорости оказывается ступенчатым. Изменение числа пар полюсов производится переключением обмоток статора в каждой его фазе. Промышленностью выпускаются 2-, 3-, 4- скоростные АД. Схемы соединения секций обмотки статора АД для изменения числа пар полюсов в соотношении 2: 1 приведены на рис. 10.1, где 1- 2 и 3 - 4 – секции обмотки; S, N – полюса, создаваемые каждой секцией; x,y – соответственно начало и конец обмотки; стрелками указано направление тока в каждой секции для различных схем их соединения.
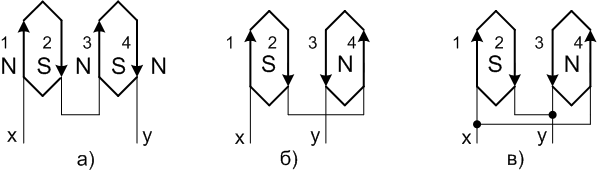
Рис. 10.1. Схемы соединения секций обмотки статора
асинхронного электродвигателя
В каждой фазе АД обмотка состоит из двух одинаковых секций: 1-2 и 3-4 (рис. 10.1). Изменение числа пар полюсов достигается переключением схемы соединения этих секций: последовательно-согласованное – а; последовательно-встречное – б; встречно-параллельное – в. В этих случаях число пар полюсов изменяется ровно в два раза.
На
рис. 10. 2 даны наиболее употребительные
схемы переключения секций обмоток
статора АД. При этом соблюдается условие,
согласно которому при переключении с
одного числа пар полюсов на другое
сохраняется то же направление вращения
ротора двигателя. На этом рисунке все
схемы включения обмоток слева соответствуют
двойному числу пар полюсов (т.е. 2р=4),
а справа – одинарному числу пар полюсов
(т.е. 2р=2).
А, В, С
– означают фазы питающегося напряжения
сети и порядок их чередования. 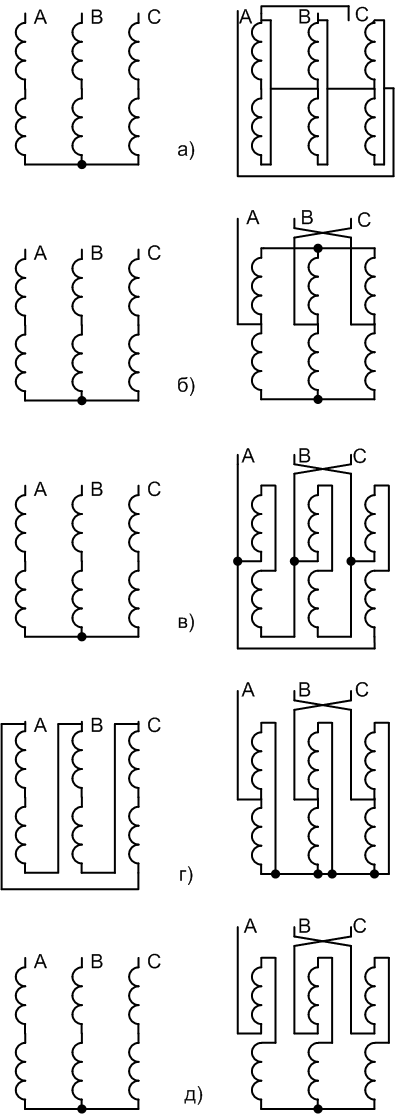
В таблице для различных схем соединения секций обмоток и соединения фаз даны соотношения моментов, развиваемых АД. Обозначение означает соединение обмоток статора АД по схеме «треугольник», обозначение Y – по схеме «звезда», обозначение YY – по схеме «двойная звезда». М4 – это момент на валу АД при 2р = 4, а М2 – при 2р = 2, где 2р – число пар полюсов.
Рис. 10.2. Схемы переключения обмоток статора многоскоростного АД.
|
№ на рис. 10.2 |
2р = 4 |
2р = 2 |
Отношение М4 / М2 |
||
|
Соединение секций |
Соединение фаз |
Соединение секций |
Соединение фаз |
||
|
а |
последовательное |
Y |
параллельное |
|
0,58 |
|
б |
последовательное |
Y или |
параллельное |
YY или |
1,0 |
|
в |
последовательное или параллельное |
Y |
последовательное или параллельное |
|
1,16 |
|
г |
последовательное |
|
параллельное |
YY |
1,73 |
|
д |
последовательное или параллельное |
Y или |
последовательное или параллельное |
Y или |
2,0 |