ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.10.2024
Просмотров: 74
Скачиваний: 0
СОДЕРЖАНИЕ
Лабораторная работа № 6 типовые схемы управления асинхронными элетродвигателями
Указания и порядок выполнения работы
Основные теоретические положения
Указания и порядок выполнения работы
Указания и порядок выполнения работы
Лабораторная работа № 10 управление многоскоростными асинхронными электродвигателями
Основные теоритические положения
- в исходном состоянии подано напряжение питания на фазы А, В, С; автоматический выключатель QF включен; кнопки SB1 (замкнута), SB2 (разомкнута) не нажаты; катушки КМ1, КМ2 пускателей обесточены; двигатель М отключен от сети (т. е. не вращается); контакты BN реле РКС разомкнуты;
- при кратковременном нажатии кнопки «Пуск» SB2 на катушку КМ1 через цепь SB1, SB2, КМ2 подается напряжение питания и она срабатывает; замыкающиеся блок-контакты КМ1 шунтируют контакты кнопки SB2 и после этого ее можно отпускать; через силовые контакты КМ1 подается напряжение питания на обмотки статора электродвигателя М; одновременно размыкающиеся блок-контакты КМ1 разрывают цепь питания катушки КМ2; при вращении электродвигателя М срабатывает реле РКС и его контакты BN замыкаются (включения катушки КМ2 не произойдет, так как в ее цепи питания разомкнуты контакты КМ1); электродвигатель работает в двигательном режиме - точка 1;
- при кратковременном нажатии кнопки «Стоп» SB1 производится разрыв по цепи питания катушки КМ1, она отключается, обесточивает электродвигатель М, размыкается блок-контакт KМ1 (включенный параллельно кнопке SB2, после этого кнопку SB1 можно отпускать) и замыкается блок-контакт КМ1 в цепи питания катушки КМ2, поскольку электродвигатель продолжает вращаться под действием сил инерции, то контакты реле РКС BN замкнуты, поэтому по цепи BN, KM1 получает питание катушка КМ2 и она срабатывает; размыкающиеся блок-контакты КМ2 дополнительно разрывают цепь питания катушки КМ1 (этим предотвращается включение катушки КМ1 в случае нажатия кнопки SB2, что приведет к короткому замыканию на зажимах статорных обмоток электродвигателя); через силовые контакты КМ2 подается напряжение питания с изменением порядка чередования фаз на обмотки статора электродвигателя М; направление вращения электродвигателя под действием сил инерции не изменилось, но направление вращения электромагнитного поля и момент на валу электродвигателя изменили свой знак, т. е. электродвигатель перешел в тормозной режим - точка 2; за счет энергии электромагнитного поля и сил трения электродвигатель эффективно затормаживается, переходя из точки 2 в точку 3; в окрестностях точки 3 контакты BN реле РКС размыкаются и отключают катушку КМ2, электродвигатель М отключается от сети и схема возвращается в исходное состояние;
- если не отключить электродвигатель М в точке 3 от сети, то под действием вращающего момента он перейдет в двигательный режим - точка 4 и будет вращаться с той же скоростью w1, но в противоположенном направлении.
На рис. 7.5 приведена реверсивная схема управления асинхронным электродвигателем с торможением противовключением с использованием реле РКС. Она обеспечивает его переход в тормозной режим при любом направлении вращения. Для этого используются переключающиеся контакты реле РКС - BN1 и BN2, которые срабатывают при разных направлениях вращения ротора электродвигателя. Например, контакты BN1 действуют при вращении вправо, a BN2 - при вращении влево. В остальном работа этой схемы аналогична рассмотренной ранее (рис. 7.2).
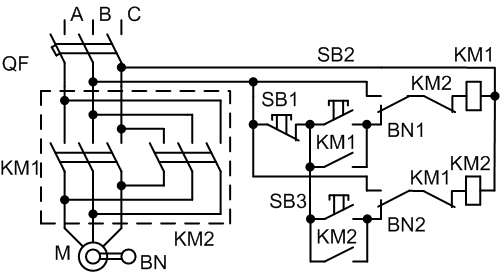
Рис. 7.5. Реверсивная схема управления асинхронным
электродвигателем с торможением противовключением
Рассмотренные схемы (рис. 7.2 и 7.5) облегчают управление электродвигателями, устраняют возможные ошибки при пуске и остановке, ведут к повышению производительности оборудования. Для обеспечения режима торможения противовключением в этих схемах используется принцип управления электродвигателями в функции скорости. При этом требуется контролировать угловую скорость ротора электродвигателя и вырабатывать команды для схемы управления при ее строго определенных значениях. В качестве простейшего устройства контроля скорости рассмотрено применение реле РКС Преимущества реле РКС заключаются в невысокой стоимости и простоте конструкции. К их недостаткам относятся низкая надежность в работе и невозможность изменять порог срабатывания в широком диапазоне. Эти устройства часто применяются для управления электроприводами в сельскохозяйственном производстве. В ряде случаев вместо реле РКС могут быть применены другие приборы для измерения угловой скорости ротора, например тахогенераторы. Однако их использование приводит к существенному удорожанию и усложнению схемы управления электродвигателем и применяются в ограниченных случаях.
Указания и порядок выполнения работы
1. Ознакомиться с электрооборудованием лабораторного стенда и конструкцией реле РКС.
2. Собрать нереверсивную схему управления асинхронным электродвигателем с торможением противовключением (рис. 7.2). Проверить работу схемы и ее соответствие временной диаграмме (рис. 7.3).
3. Собрать реверсивную схему управления асинхронным электродвигателем с торможением противовключением (рис. 7.5). Проверить работу схемы и ее соответствие временной диаграмме.
4. Вычертить принципиальные электрические схемы управления – рис. 7.2. и 7.5, их временные диаграммы работы.
Лабораторная работа № 8
УПРАВЛЕНИЕ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ В
ФУНКЦИИ ПУТИ С ПОМОЩЬЮ КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ
ЦЕЛЬ РАБОТЫ. Изучить принцип управления асинхронным электродвигателем в функции пути, ознакомиться с конструкцией конечных выключателей и режимами управления электроприводами.
ПРОГРАММА РАБОТЫ
1. Изучить принципы управления и режимы работы схем для разомкнутых систем управления электроприводами.
2. Изучить устройство конечных выключателей.
3. Исследовать работу схемы управления асинхронным электродвигателем в функции пути.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ
Управление электроприводами заключается в осуществлении пуска, регулирования скорости, торможения, реверсирования, а также поддержания режима работы электродвигателя в соответствии с требованиями технологического процесса.
Автоматическое управление электроприводами является одним из основных, условий повышения производительности механизмов и производства продукции высокого качества. Системы автоматического управления подразделяются на разомкнутые и замкнутые. В сельском хозяйстве более 90 % систем автоматического управления электроприводами являются разомкнутыми. В основном это объясняется их низкой стоимостью, большой распространенностью и простотой обслуживания.
В разомкнутых системах управления электроприводами в основном осуществляется автоматическое управление работой электродвигателя при пуске, остановке, реверсе, торможении, ступенчатом регулировании скорости и т. д. В схемах управления используются различные приборы и аппараты: магнитные пускатели, реле, кнопочные станций, конечные выключатели, регуляторы, бесконтактные логические элементы, вспомогательные электрические машины и аппараты.
Разомкнутые автоматические системы используют различные принципы управления электроприводами. Наибольшее распространение получили в них принципы управления в функции скорости, пути, времени и тока. При реализации каждого из этих принципов управления в схеме применяются соответствующие датчики и устройства:
при управлении в функции скорости это реле РКС или тахогенераторы;
при управлении в функции пути это конечные выключатели или датчики положения;
при управлении в функции времени это реле выдержки времени;
при управлении в функции тока это датчики величины тока.
Основное назначение перечисленных схем – обеспечить правильную работу электродвигателя и рабочей машины во всех технологических режимах эксплуатации. В частности, сюда относятся: позиционированная остановка, пуск и реверс с заданными временами работы, ограничение углового или линейного перемещений, ограничение величины токов и моментов при пуске и торможении и др.
Принцип управления электроприводом в функции пути используется в сельском хозяйстве в установках для подачи воды, подъемно-транспортных устройствах, кормораздатчиках, скреперных установках для уборки навоза и др. В этих устройствах для ограничения передвижения рабочего органа установки применяются конечные и путевые выключатели различной конструкции. Широкое распространение получили конечные выключатели при автоматизации процессов кормораздачи на животноводческих фермах. В электрифицированных рельсовых кормораздатчиках, платформенных кормораздатчиках, бункерных навесных кормораздатчиках и др. при помощи конечных выключателей осуществляют автоматическое изменение направления движения или остановку в заданном месте. При помощи конечных выключателей ограничивают перемещение фермы мостового крана по цеху грузоподъемной тележки по ферме и предельный подъем груза. Они являются основными элементами автоматизации башенных и безбашенных водокачек.
Конечные и путевые выключатели предназначены для получения управляющих сигналов в определенных точках пути перемещающегося рабочего органа. В зависимости от типа коммутирующего устройства различают контактные и бесконтактные конечные выключатели. В сельском хозяйстве широко используются контактные конечные и путевые выключатели.
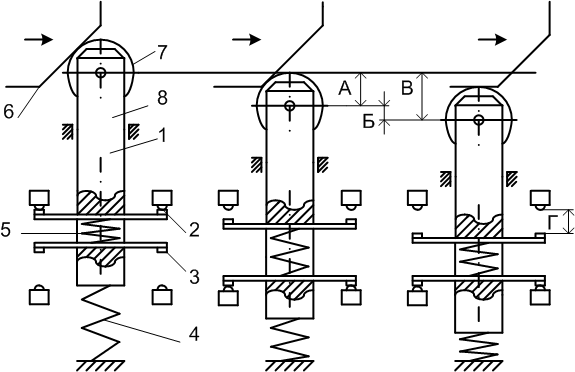
Рис. 8.1. Конечный выключатель прямого действия.
Принцип действия и работа подвижных частей конечного выключателя прямого действия серии ВПК-2000 показаны на рис. 8.1. Коммутирующее устройство выключателя состоит из пластмассового штока 1, на котором расположены два контакта мостикового типа, образующих размыкающиеся 2 и замыкающиеся 3 контактные пары. В пазу штока между мостиковыми контактами находится цилиндрическая пружина 5, создающая контактное нажатие. Вторая пружина 4 установления между штоком и корпусом выключателя и предназначена для самовозврата коммутирующего устройства в начальное положение после прекращения внешнего воздействия. Внешнее воздействие, например в виде упора 6, расположенного на движущемся элементе, перемещает толкатель 8 с роликом 7 на величину прямого хода А в положении прямого срабатывания, при котором происходит замыкание контактов 3 выключателя. Однако в этом положении контактное нажатие мало и требуется еще некоторый дополнительный ход Б для того, чтобы сжать пружину 4 и обеспечить номинальное контактное нажатие. Величина дополнительного хода должна быть не менее 3-5 мм. Сумма ходов А и Б дает полный ход приводного элемента В, который должен быть обеспечен перемещающимся упором. После прохода управляющего упора 6 пружина 4 возвращает контактную систему в первоначальное положение. Ролик приводного элемента 7 скользит по поверхности упора 6. После перемещения штока на величину обратного хода Г в положении обратного срабатывания замкнутся размыкающиеся контакты 2. Затем шток переместится на величину дополнительного обратного хода, и выключатель возвратится в первоначальное положение. Разность положений прямого и обратного срабатываний определяет дифференциал выключателя.
Для рассмотренного конечного выключателя такты работы замыкающихся и размыкающихся контактов смещены во времени. Размыкающиеся контакты 2 размыкаются несколько раньше, а замыкаются позже, чем замыкаются и размыкаются замыкающиеся контакты 3. Такой порядок работы выключателя называется прямым.
Рассмотрим примеры использования конечных выключателей для управления асинхронными двигателями в функции пути.
На рис. 8.2. показаны принципиальная электрическая (а) и технологическая (b) схемы управления электродвигателем транспортера, подающего продукцию в бункер.