Файл: Контрольная работа по курсу "Электромеханические устройства автоматики" Обучающегося Ф. И. О группы.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 217
Скачиваний: 14
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ Российской Федерации
Федеральное государственное бюджетное
образовательное учреждение высшего образования
«ТЮМЕНСКИЙ ИНДУСТРИАЛЬНЫЙ университет»
Контрольная работа
по курсу
"Электромеханические устройства автоматики"
Обучающегося Ф.И.О
группы ____________
Проверил
_________________/ Е.П. Власова
Тюмень 2023___ г.
Задание
-
Составить схемы включения универсальных асинхронных микродвигателей в питающую сеть. Указать достоинства и недостатки универсальных двигателей. -
Привести схемы включения, перечислить способы управления, показать вид механических и регулировочных характеристик однофазных асинхронных исполнительных двигателей. -
Объяснить, что такое самоход асинхронных исполнительных двигателей. Указать возможные причины и виды самохода, привести способы борьбы с самоходом. -
Перечислить способы управления и привести схемы включения исполнительных двигателей постоянного тока. Показать вид механических и регулировочных характеристик этих двигателей. -
Указать какие режимы работы сельсинов применяются, когда применяется тот или иной режим. Привести схемы индикаторной и трансформаторной систем синхронной связи.
Заключение
Список литературы
Содержание
| | Введение | 4 |
| 1.1 | Схемы включения универсальных асинхронных двигателей | 5 |
| 1.2 | Достоинства и недостатки УАД | 7 |
| 2.1 | Асинхронный исполнительный двигатель | 8 |
| 2.2 | Схемы включения АИД | 8 |
| 2.3 | Самоход АИД | 10 |
| 3.1 | Исполнительный двигатель постоянного тока | 10 |
| 3.2 | Характеристики ИДПТ | 10 |
| 4.1 | Режимы работы сельсинов | 11 |
| 4.2 | Схемы индикаторной и трансформаторной систем синхронной связи | 12 |
| | Заключение | 14 |
| | Список литературы | 15 |
| | | |
| | | |
Введение
Обычно электрические двигатели делят на три группы: большой, средней и малой мощностей. Для двигателей малой мощности (будем называть их микродвигателями) верхнюю границу мощности не устанавливают, обычно это несколько сот ватт. Микродвигатели широко используют в приборах и аппаратах бытового назначения (сейчас в каждой семье имеется несколько микродвигателей - в холодильниках, пылесосах, магнитофонах, проигрывателях и пр.), измерительной технике, системах автоматического регулирования, авиации и космической технике и других областях человеческой деятельности.
Первые электродвигатели постоянного тока появились еще в 30-е годы XIX столетия. Большой шаг в развитии электродвигателей был сделан в результате изобретения в 1856 г. немецким инженером Сименсом двухякорного преобразователя и открытия им в 1866 г. динамоэлектрического принципа. В 1883 г. Тесла, а в 1885 г. Феррари независимо друг от друга изобрели асинхронный двигатель переменного тока. В 1884 г. Сименс создал коллекторный двигатель пе-§ ременного тока с последовательной обмоткой возбуждения. В 1887 г. Хазельвандер и Доливо-Добровольский предложили конструкцию ротора с короткозамкнутой обмоткой типа "беличья клетка", что существенно упростило конструкцию двигателя. В 1890 г. Хитин и Лебланк впервые использовали фазосдвигающий конденсатор.
В бытовых электроприборах электродвигатели начали использовать с 1887 г. - в вентиляторах, с 1889 г. - в швейных машинах, с 1895 г. - в бормашинах, с 1901 г. -в пылесосах. Однако к настоящему времени потребность в микродвигателях оказалась настолько большой (в современной видеокамере используется до шести микродвигателей), что возникли специализированные фирмы и предприятия по их разработке и производству.
Однофазные асинхронные микродвигатели являются наиболее распространенным типом, они удовлетворяют требованиям большинства электроприводов приборов и аппаратов, отличаясь низкой стоимостью и уровнем шума, высокой надежностью, не требуют ухода и не содержат подвижных контактов.
-
Схемы включения универсальных асинхронных двигателей
Асинхронный микродвигатель может быть с одной, двумя или тремя обмотками. В однообмоточном двигателе нет начального пускового момента, и для его запуска нужно использовать, например, пусковой двигатель. В двухобмоточном двигателе одна из обмоток, называемая главной, непосредственно подключается к питающей сети (рис.1).
Для создания пускового момента в другой, вспомогательной, обмотке должен протекать ток, сдвинутый по фазе относительно тока в главной обмотке. Для этого последовательно со вспомогательной обмоткой включают дополнительный резистор, который может иметь активный, индуктивный или емкостной характер.
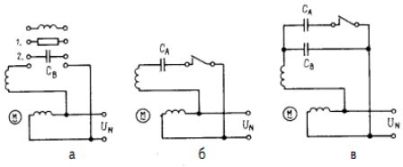
Рисунок 1.
Наиболее часто в цепь питания вспомогательной обмотки включают конденсатор, получая при этом оптимальный угол сдвига фаз токов в обмотках, равный 90° (рис.1,6). Конденсатор, постоянно включенный в цепь питания вспомогательной обмотки, называется рабочим. Если при запуске двигателя необходимо обеспечить повышенный пусковой момент, то параллельно рабочему конденсатору Св на время пуска включают пусковой конденсатор Са (рис.1,в). После разгона двигателя до частоты вращения пусковой конденсатор отключается с помощью реле или центробежного выключателя. На практике чаще используют вариант рис.1,6.
Эффект сдвига фаз можно получить путем искусственного увеличения активного сопротивления вспомогательной обмотки. Это достигается либо включением дополнительного резистора, либо изготовлением вспомогательной обмотки из высокоомного провода. Из-за повышенного нагрева вспомогательной обмотки последнюю после запуска двигателя отключают. Такие двигатели дешевле и надежнее конденсаторных, хотя и не позволяют обеспечить фазовый сдвиг токов обмоток в 90°.
Для реверса направления вращения вала двигателя в цепь питания вспомогательной обмотки следует включить катушку индуктивности или дроссель, вследствие чего ток в главной обмотке будет опережать по фазе ток во вспомогательной обмотке. На практике этот способ применяется редко, так как сдвиг фаз получается незначительным из-за индуктивного характера сопротивления вспомогательной обмотки.
Чаще всего используют способ фазового сдвига между основной и вспомогательной обмотками, заключающийся в замыкании вспомогательной обмотки. Главная обмотка имеет магнитную связь со вспомогательной, благодаря чему при подключении главной обмотки к питающей сети во вспомогательной наводится ЭДС и возникает ток, отстающий по фазе от тока главной обмотки. Ротор двигателя начинает вращаться в направлении от главной к вспомогательной обмотке.
Трехобмоточный трехфазный асинхронный двигатель можно использовать в режиме однофазного питания. На рис.2 показано включение трехобмоточного двигателя по схемам "звезда" и "треугольник" в однофазный режим работы (схемы Штейнмеца). Две из трех обмоток непосредственно включены в питающую сеть, а третья подключена к напряжению питания через пусковой конденсатор. Для создания необходимого пускового момента последовательно с конденсатором необходимо включать резистор, сопротивление которого зависит от параметров обмоток двигателя.
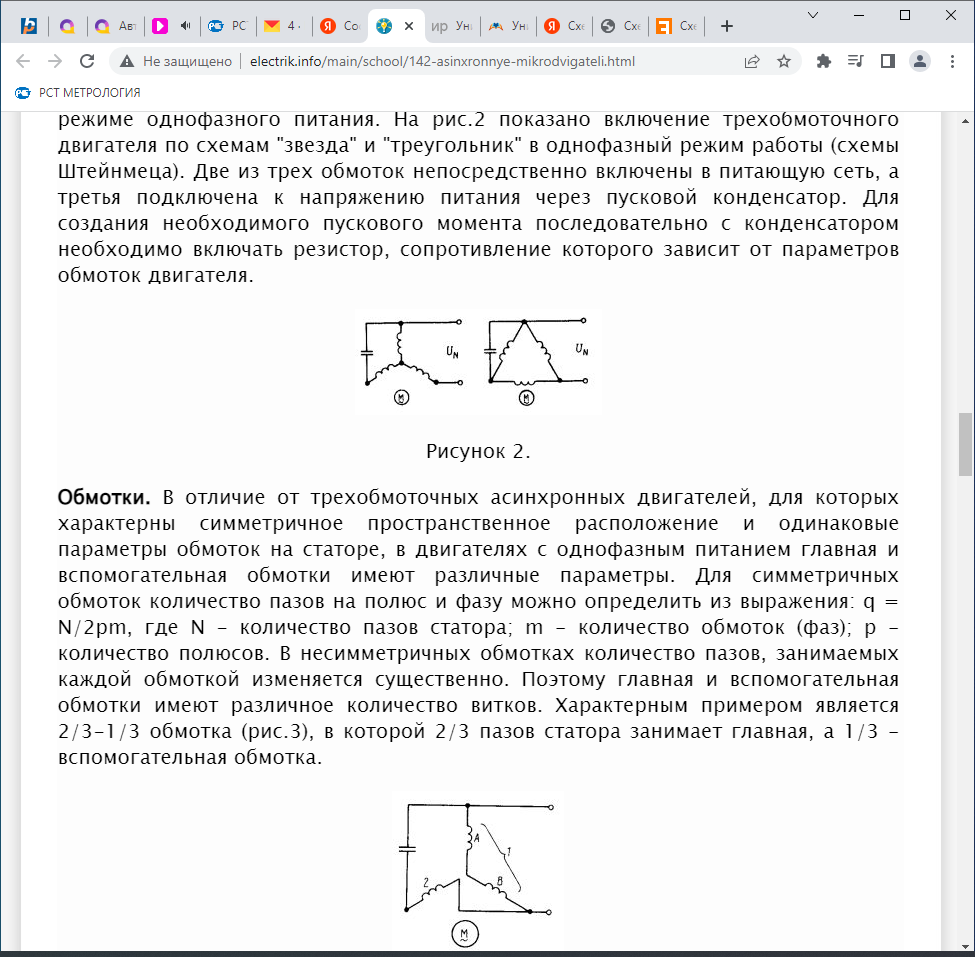
Рисунок 2.
-
Достоинства_и_недостатки_УАД'>Достоинства и недостатки УАД
Достоинства и недостатки универсальных асинхронных двигателей представлены в таблице 1.
Таблица 1
| Достоинства | Недостатки |
| Высокая надежность в работе | Чувствительность к колебаниям сетевого напряжения |
| Возможность питания непосредственно от сети переменного трехфазного напряжения | Меньший пусковой момент ( по сравнению с ДПТ той же мощности) |
| Простота констрцкции | |
| Низкая стоимость | |
| Малые эксплуатационные расходы | |
| Высокая степень защиты от влияния окружающей среды | |
2.1 Асинхронный исполнительный двигатель
Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки
2.2 Схема включения АИД
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 3, а, б, в).
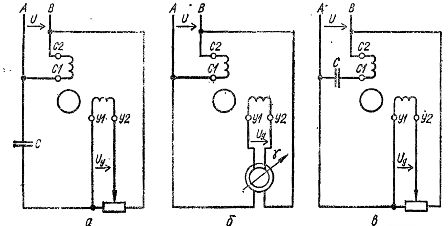
Рисунок 3 - Схемы включения асинхронных исполнительных двигателей при управлении: а - амплитудном, б - фазовом, в - амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
Пуск, регулирование скорости и остановка исполнительных двигателей определяются условиями формирования магнитного поля путем амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 3, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 3, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 3, в).