Файл: Контрольная работа по курсу "Электромеханические устройства автоматики" Обучающегося Ф. И. О группы.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 218
Скачиваний: 14
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного исполнительного двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится эллиптическим. В случае фазового управления круговое вращающееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении круговое вращающееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент пуска двигателя, а затем по мере разгона ротора оно переходит в эллиптическое.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
2.3 Самоход АИД
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
3.1 Исполнительный двигатель постоянного тока
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление.
3.2 Характеристики идеального двигателя постоянного тока
Основными характеристиками, по которым оценивают рабочие свойства двигателей, являются:
-скоростная — зависимость частоты вращения от тока якоря;
-моментная — зависимость электромагнитного момента от тока якоря;
-механическая— зависимость частоты вращения от электромагнитного момента, п =f(M).
4.1 Режимы работы сельсинов
Сельсинами (от слов self sinchroniring - самосинхронизирующийся) называют индукционные машины, обеспечивающие синхронный и синфазный поворот или вращение двух или нескольких осей, механически не связанных между собой. Одна из таких машин механически соединена с ведущей осью и называется датчиком, а другая - с ведомой осью и называется приёмником.
Сельсины имеют две обмотки: возбуждения и синхронизации. Различают одно- и трёхфазные сельсины, обмотка синхронизации у обоих - трехфазная. В системах автоматики наибольшее распространение получили однофазные сельсины, которые бывают контактными и бесконтактными.
Однофазный сельсин представляет собой асинхронную машину, в которой обмотка возбуждения создает пульсирующий поток, индуцирующий в трех фазах обмотки синхронизации ЭДС. Величина этих ЭДС зависит от угла поворота датчика (ротора)
Различают два режима работы сельсинов: индикаторный и трансформаторный.
Индикаторный режим используется при отсутствии другого исполнительного двигателя. Синхронизирующий момент между валами сельсина- датчика и сельсина- приемника создается при наличии некоторого пространственного угла
В трансформаторном режиме к ведомой оси приложен значительный момент сопротивления. Поэтому угол рассогласования
4.2 Схемы индикаторной и трансформаторной систем синхронной связи
На рисунке 4 показаны структурные схемы систем дистанционной передачи угла поворота вала с помощью сельсина-датчика СД и сельсина-приемника СП, соединенных линией связи ЛС. При повороте вала В на угол α (рис. 4, а) сельсином-датчиком вырабатывается соответствующий этому углу сигнал, который передается по линии связи на сельсин-приемник СП, где он преобразуется в угловое перемещение ротора СП на угол α. Рассмотренная система называется индикаторной, так как вал сельсина-приемника поворачивает стрелку индикатора И, отмечающую на шкале угол поворота вала В.
Индикаторная система только передает информацию об угловом положении контролируемого вала. Если требуется воспроизвести угол поворота α вала В на какомлибо рабочем механизме, то система дополняется усилителем мощности У и исполнительным двигателем ИМ (рис. 4, б), который через редуктор Р создает на валу рабочего механизма РМ вращающий момент, достаточный для поворота вала на угол α.
Одновременно поворачивается ротор сельсина-приемника СП на угол α. Такая система дистанционной передачи называется трансформаторной.
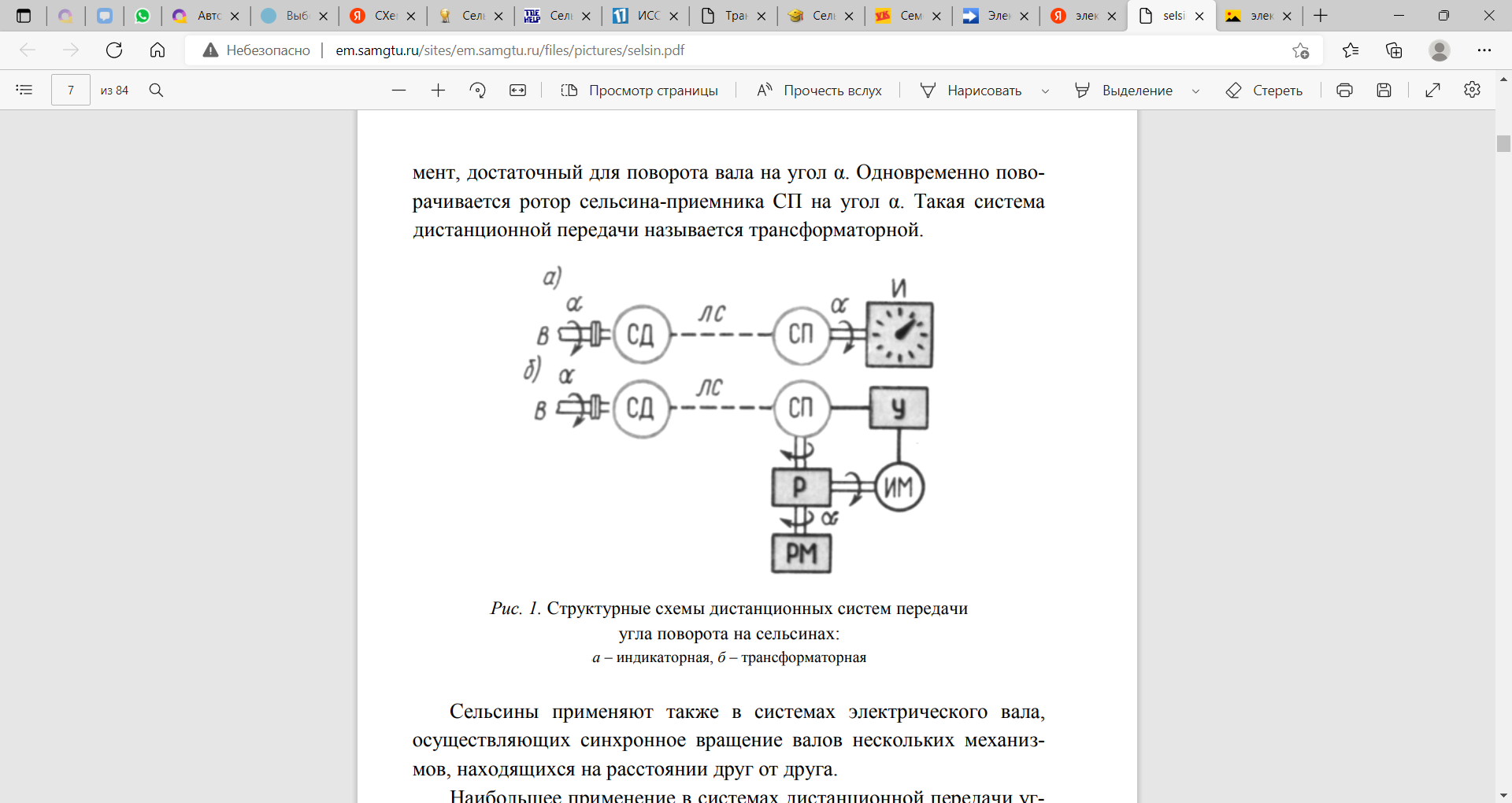
Рисунок 4 - Структурные схемы дистанционных систем передачи угла поворота на сельсинах: а – индикаторная, б – трансформаторная
Заключение
В результате выполнения самостоятельной работы были получены навыки и знания о универсальных асинхронных микродвигателей, выявлены достоинства и недостатки универсальных двигателей.
Привели схемы включения, перечислили способы управления, показали вид механических и регулировочных характеристик однофазных асинхронных исполнительных двигателей.
Объяснили, что такое самоход асинхронных исполнительных двигателей.
Привели схемы включения исполнительных двигателей постоянного тока.
Изучили какие режимы работы сельсинов применяются, когда применяется тот или иной режим. Привели схемы индикаторной и трансформаторной систем синхронной связи.
Список используемой литературы
-
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения. -
Е.В.Арменский, Г.Б.Фалк. Электрические микромашины. Изд. 2-е, перераб. и доп.: Учеб. пособие для электротехн. специальностей вузов.- М.: Высш. школа, 1975. -
М.М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987. -
Учебное пособие «Однофазные контактные и бесконтактные сельсины» (История развития, конструкции, основы теории, характеристики и экспериментальные исследования): учеб. пособие / Сост. Э.Г. Чеботков. – Самара: Самар. гос. техн. ун-т, 2012. – 83 с.: ил.