Добавлен: 21.10.2018
Просмотров: 1742
Скачиваний: 4
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
16/28
. (15)
Для системы с отрицательной ОС по напряжению искомое произведение коэффициентов находят из
выражения:
, (16)
а с положительной обратной связью по току так:
, (17)
где
= IR
э
k
д
— погрешность в разомкнутой системе;
— заданная погрешность в замкнутой системе;
= IR
я
k
д
— погрешность естественной характеристики двигателя; S
з
— заданный статизм замкнутой
системы; S
p
— статизм разомкнутой системы; S
e
— статизм естественной характеристики; Д — расчетный
диапазон регулирования скорости.
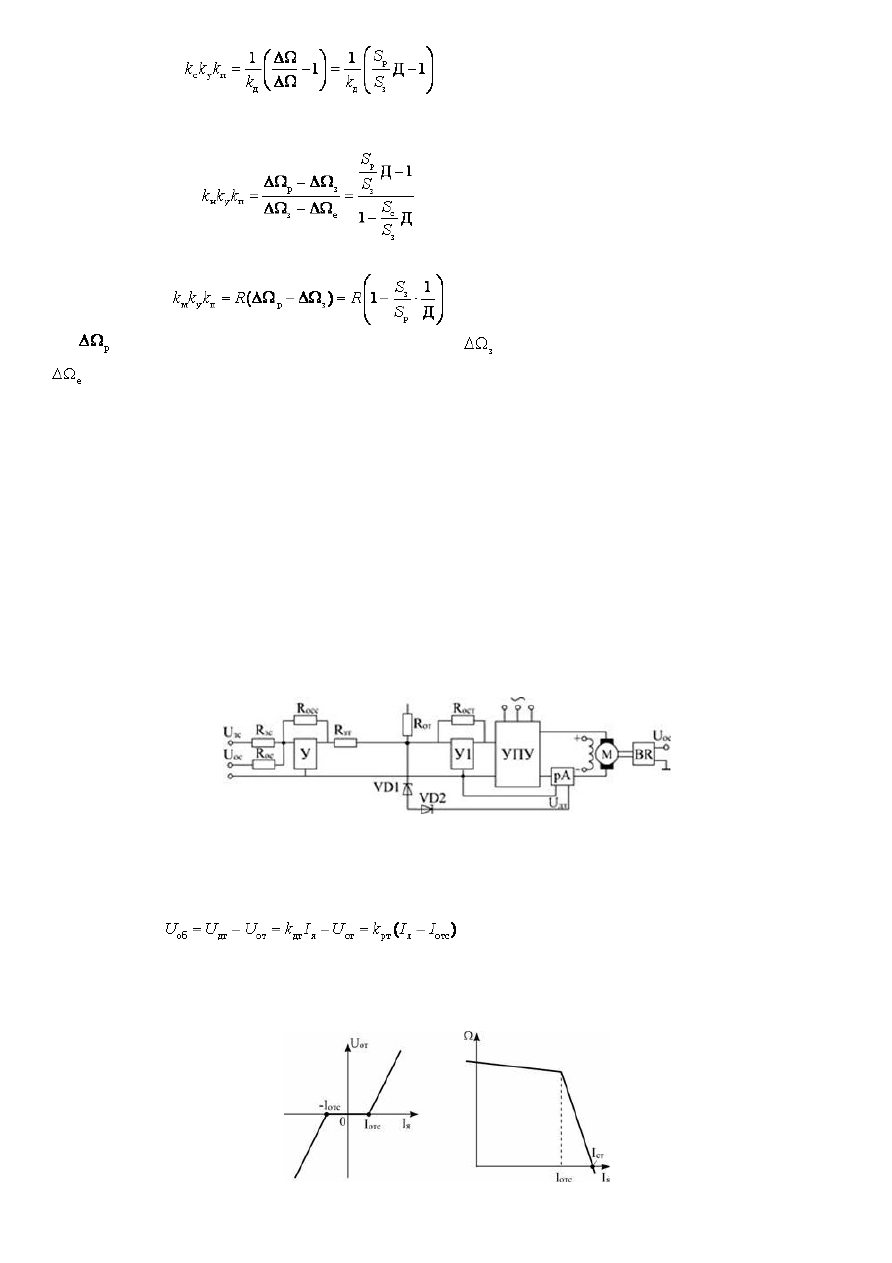
Стабилизация момента ДПТ осуществляется с помощью отрицательной обратной связи по току,
обеспечивающей резкое снижение скорости двигателя при приблизительно постоянном моменте. Связь
используется с отсечкой (рис. 15), исключающей действие связи за счет характеристик стабилитронов VD1,
VD2 при низких нагрузках. Введение связей по току обусловлено необходимостью защиты двигателя от
недопустимых перегрузок в статических и динамических режимах.
В режиме стабилизации момента отрицательные обратные связи по току, скорости и напряжению,
осуществляющие стабилизацию скорости, действуют совместно. Связь по току снижает скорость и ЭДС
преобразователя, а связь по скорости их повышает. Поэтому связь по скорости целесообразно отключить при
стабилизации момента за счет отсечки. Отсечка реализуется обычно за счет ограничения выходного
напряжения промежуточного усилителя, задающего напряжение для контура стабилизации момента.
Рис. 15. Функциональная схема с отсечкой по току
Задержка включения отрицательной ОС по току формируется за счет срабатывания стабилитронов VD1,
VD2 на входе усилителя У1. Напряжение токов связи U
об
на входе усилителя определяется различно для
различных участков изменения тока
(18)
где k
дт
- передаточный коэффициент датчика тока, U
от
– напряжение отсечки по току, равное напряжению
стабилитронов VD1, VD2; I
отс
= U
от
/ k
дт
– ток отсечки.
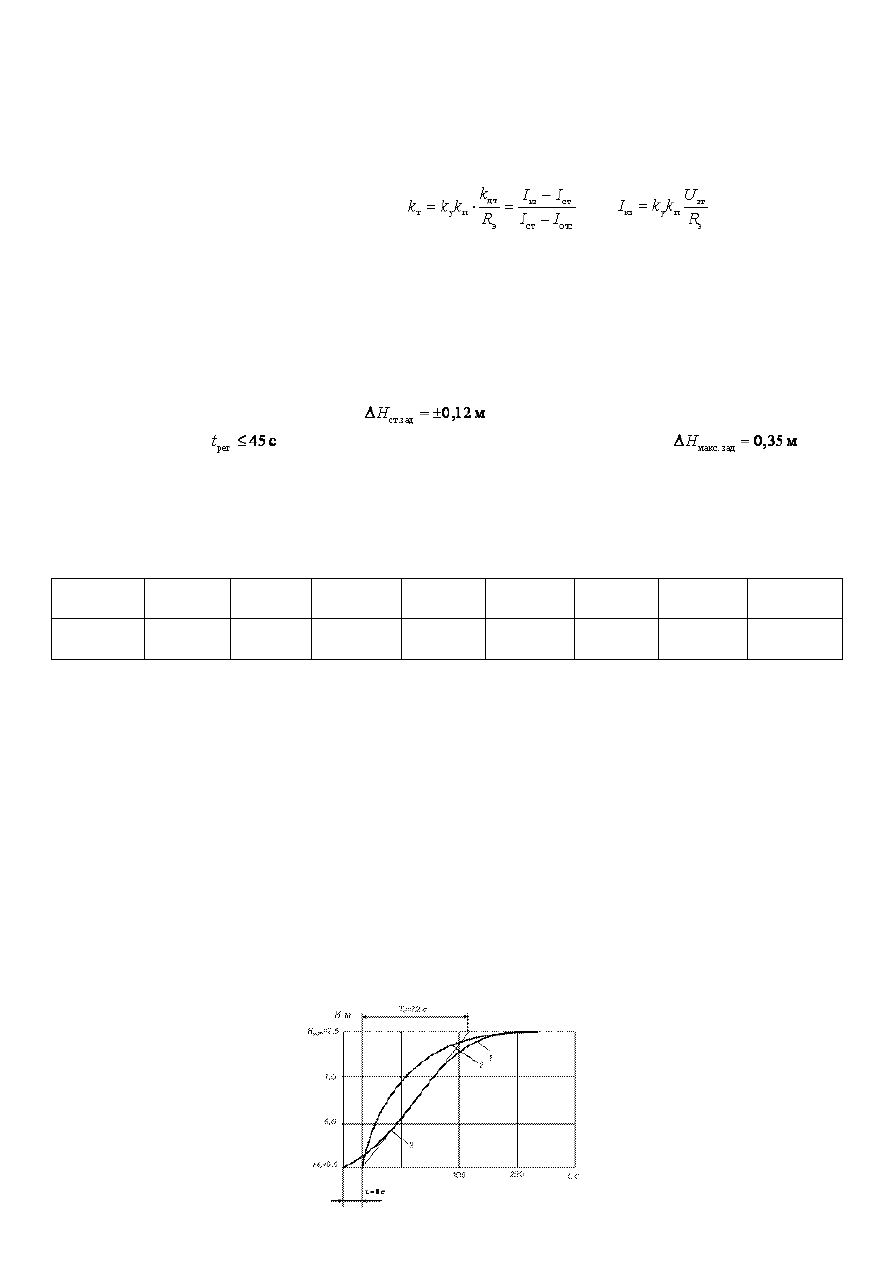
Характеристики токовой отсечки и механической двигателя с отсечкой по току приведены на рис. 16.
а) б)
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
17/28
Рис. 16. Формирование токовой отсечки (а) и механической характеристики двигателя с токовой отсечкой (б)
Для определения коэффициентов усиления по замкнутому контуру тока и обратной связи при токах
отсечки I
отс
и стопорения I
ст
значение тока стопорения I
ст
следует принять при W
= 0. В режиме стопорения
для рассматриваемой системы можно записать, что при W
= 0, I
я
= I
ст
и E
ст
= I
ст
R
э
= k
п
k
у
[U
зт
- k
дт
(I
ст
- I
отс
)],
где E
ст
— ЭДС преобразователя в режиме стопорения. При анализе полученного выражения коэффициент
усиления по замкнутому контуру тока составит:
, где
— расчетный ток
короткого замыкания.
При расчете параметров элементов отрицательной ОС по току коэффициенты усиления усилителя У1 по
задающему воздействию выбираются произвольно.
4. Ход работы курсового проекта на примере АСР уровня раствора в баке
Задание. Подобрать типовой регулятор для АСР уровня раствора в баке. Условия эксплуатации
регулятора и других устройств АСР задаются дополни тельно или не ограничиваются. Уровень должен
поддерживаться со статической точностью
. В переходных процессах, длительность которых
должна быть не более
, допускаются в первом выбросе отклонения уровня до
.
При работе без регулятора наблюдаются плавные и скачкообразные отклонения уровня от заданного
значения. Для определения па раметров объекта была экспериментально снята кривая разгона (табл. 4), воз-
никающая при перестановке регулирующего органа на М
= 25%.
Таблица 4.
Данные экспериментальной кривой разгона
Н, м
t,c
6,00
0
6,03
5
6,05
10
6,12
15
6,18
20
6,24
25
6,30
30
6,45
40
Н, м
t,с
6,60
50
6,75
60
6,84
70
6,96
80
7,05
90
7,11 100
7,46 200
7,50
500
Выполнить следующие задания:
1. Построить (если от руки, то на миллиметровке) кривую разгона 1 (рис. 1), заданную табл. 1.
Определить параметры эквивалентного объекта, который описывается, уравнением первого (второго) поряд ка
с запаздыванием. Найти пара метры объекта k
0
, Т
0
, τ.
2. Построить эквивалентную кри вую разгона 2 на том же графике, что и кривая 1, произвести оценку
аппроксимации.
3. Выбрать тип (закон) регулято ра и определить параметры его на стройки.
4. Проверить правильность выбо ра регулятора и параметров его на стройки путем построения графика
переходного процесса в системе с за данным объектом и выбранным регу лятором. Расчеты выполнить с при-
менением компьютера.
Дать подробный анализ полученных результатов, сравнить их с заданием.
5. Выбрать типовой промышлен ный регулятор и привести его основные характеристики, составить
функциональ ную (структурную) схему АСР, кратко описать принцип действия системы.
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
18/28
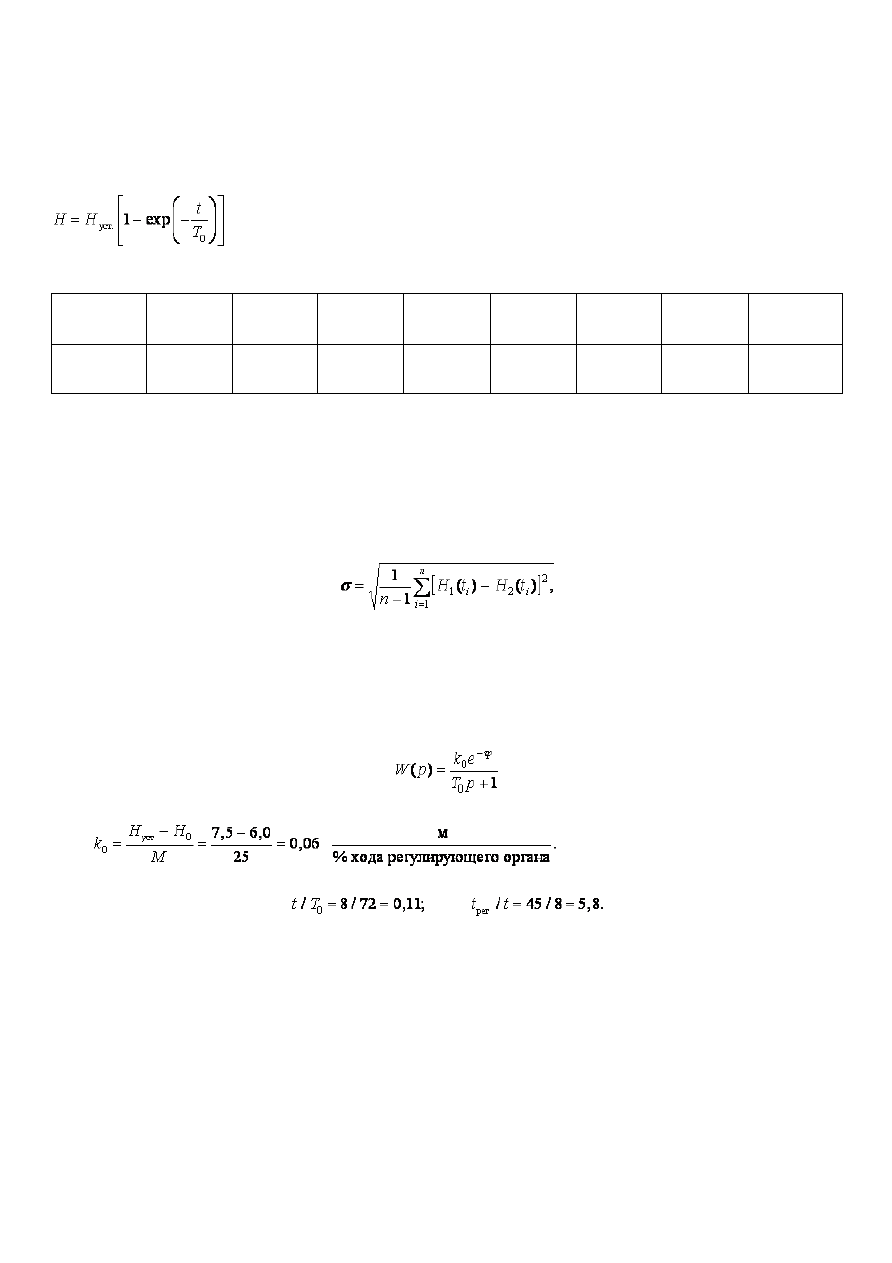
Рис. 17. Временные характеристики гидравлического объекта управления по уровню: 1 — экспериментальная кривая; 2
— эквивалентная кривая; 3 — точка перегиба.
1. Определение параметров объекта управления.
По кривой 1 (рис. 17) определяем постоянную времени эквивалентного объекта Т
0
= 72 с и время
запаздывания τ
= 8 с, для чего проводим касательную с кривой переходного процесса в точке перегиба.
Эквивалентная кривая разгона представляет собой экспоненту с запаздыва нием τ. По формуле
определяем координаты экспоненты по времени (табл. 5).
Таблица 5
Данные эквивалентной кривой разгона
Н, м
t, с
6,00
0
6,18
5
6,36
10
6,50
15
6,63
20
6,72
25
6,82
30
6,99
40
Н, м
t, с
7,05
50
7,11
60
7,31
70
7,37
80
7,39
90
7,42
100
7,46
200
7,50
500
Строим на том же графике (рис. 17) эквивалентную кривую 2 со сдвигом по оси абсцисс вправо на
величину запаздывания τ
= 8 с.
Для оценки точности приближения экспериментальных данных к решению уравнения эквивалентного
объекта, полученного в результате идентификации, применяют различные критерии. Наиболее
распространенным критерием является срсднеквадратическое отклонение экспериментальных данных от
характеристики, полученной в результате расчетов:
где H
1
(t
i
) — экспериментальное значение уровня в момент времени t
i
; H
2
(t
i
) — расчетное (эквивалентное)
значение уровня в момент времени t
i
; п — число экс периментальных точек.
Таким образом, в дальнейших расчетах используем эквивалентный объект, описываемый (по
динамическим характеристикам) с точностью 10... 15% диф ференциальным уравнением 1-го порядка с
самовыравниванием и с запаздыва нием передаточной функцией вида
Величина коэффициента усиления объекта
Безразмерные показатели объекта и переходного процесса:
Другие способы параметризации моделей второго порядка по кривой разгона даны в приложении.
2. Выбор типового регулятора АСР и определение пара метров его настройки.
Требуемое качество регулирования в процессе эксплуатации АСР, кроме безусловного требования
устойчивости, определяется следующими критериями: минимальное время регулирования, отсутствие пере-
регулирования, минимальная интегральная квадратичная ошибка и др.
Выбор того или иного критерия оптимальности определяется технологическими требованиями к
системе регулирования и является одной из первых задач по выбору типового регулятора. С экономической и в
ряде случаев с технологиче ской точки зрения наиболее целесообразно применять в качестве критерия опти-
мальности минимальную интегральную квадратичную оценку, так как реализация такого критерия почти
всегда приводит к минимальным потерям при регулиро вании и к минимальным динамическим ошибкам.
Однако если параметры сис темы недостаточно точно известны или если они изменяются, то наличие в систе-
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
19/28
ме, настроенной по данному критерию, продолжительных колебаний может привести к неустойчивой работе
регулятора или резонансным явлениям.
Наибольшим запасом по устойчивости обладают системы, настроенные по кри териям с минимальным
временем регулирования и без перерегулирования. Когда требуется исключить влияние регулирующего
воздействия данной системы на другие величины сложного объекта, целесообразно, чтобы переходный
процесс имел апериодический характер.
Вторым этапом по выбору регулятора является определение типа (закона) регулятора. Существуют
различные таблицы, графики, номограммы по выбору регулятора, зависящие от динамических свойств
объекта, относительной нагрузки, характера ее изменения, заданных показателей качества регулирования.
В нашем примере (АСР уровня гидравлической системы) подходящим явля ется ПИ-регулятор, так как
по условиям задачи на объект действуют значитель ные возмущения, вызывающие отклонения уровня,
соответствующие 20%-ной перестановке регулирующего органа. Если при дальнейших расчетах окажется, что
ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и
следовательно, более дорогой) ПИД-регулятор, который имеет лучшие показатели регулирования.
За критерий оптимальности регулирования для нашего случая (АСР уровня) примем переходный
процесс с 20%-ным перерегулированием, обеспечивающий малое время регулирования переходного процесса
(задано t
рег. зад
= 45 с) и име ющий динамическую ошибку меньшую, чем при критерии с минимальным време-
нем регулирования, тем более что объект допускает 20%-ное перерегулирование. Для определения параметров
настройки типовых регуляторов в АСР с объек том первого порядка с запаздыванием при различных критериях
оптимальности можно воспользоваться табл. 2, 3.
На основании формул табл. 2 вычислим параметры ПИ-регулятора в АСР уровня с объектом первого
порядка с самовыравниванием и с запаздыванием и переходным процессом с 20%-ным перерегулированием:
3. Анализ динамических характеристик АСР с типовым регулятором.
Анализ динамических характеристик в одноконтурных АСР с типовым регулятором можно провести,
используя методику на компьютере. Эти алгоритмы расчета можно применять не только для нахождения пере-
ходных процессов в АСР технологическими процессами при выбранном типе регулятора и найденных
параметрах его настройки, но и изменяя структуру алго ритма, а также числовые значения коэффициентов,
определить наиболее целесо образный тип регулятора и его параметры.
В нашем случае (пример АСР уровня) расчет переходного процесса и АСР проведем на ЭВМ.
Структурная динамическая схема (модель) системы пред ставляет собой систему первого порядка с
самовыравниванием и с запаздыва нием с ПИ-регулятором, где
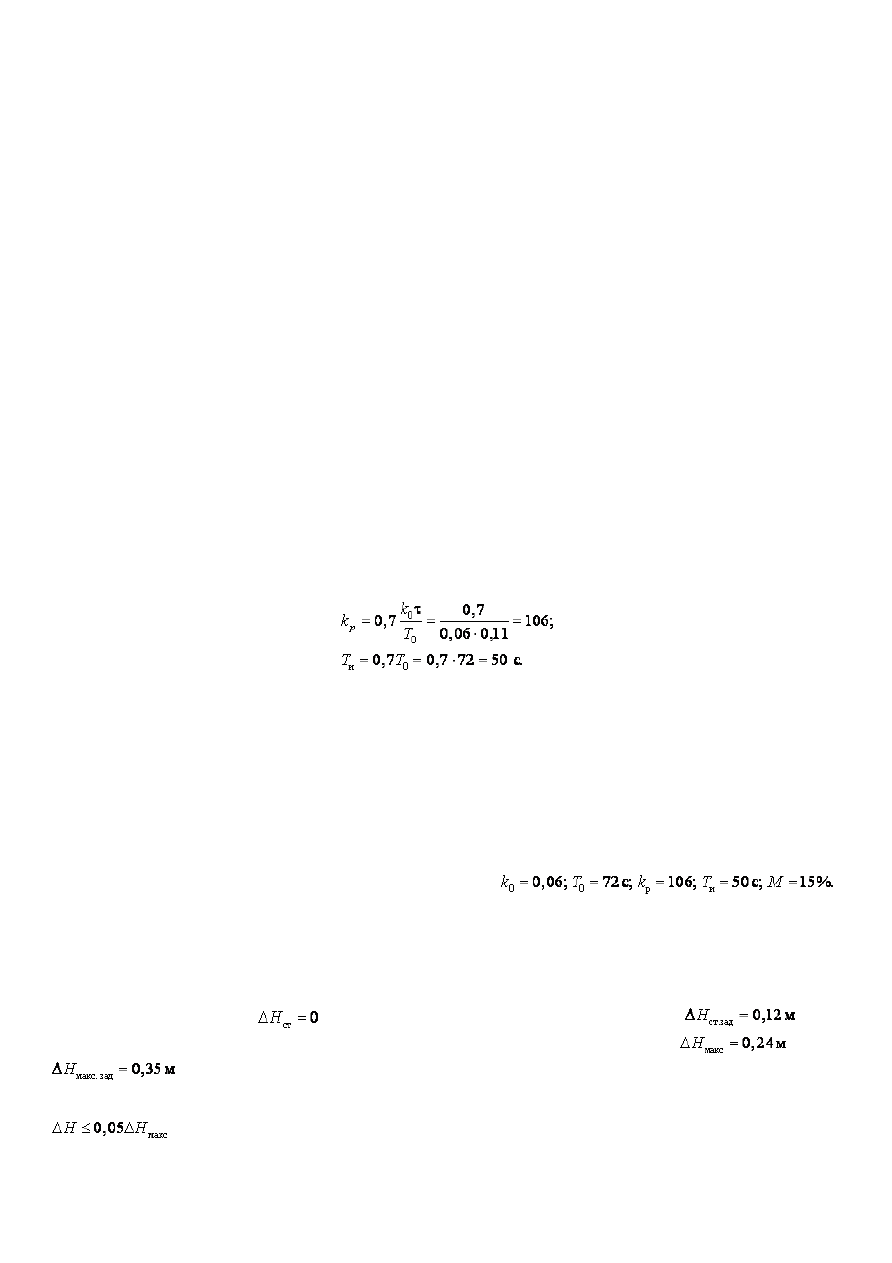
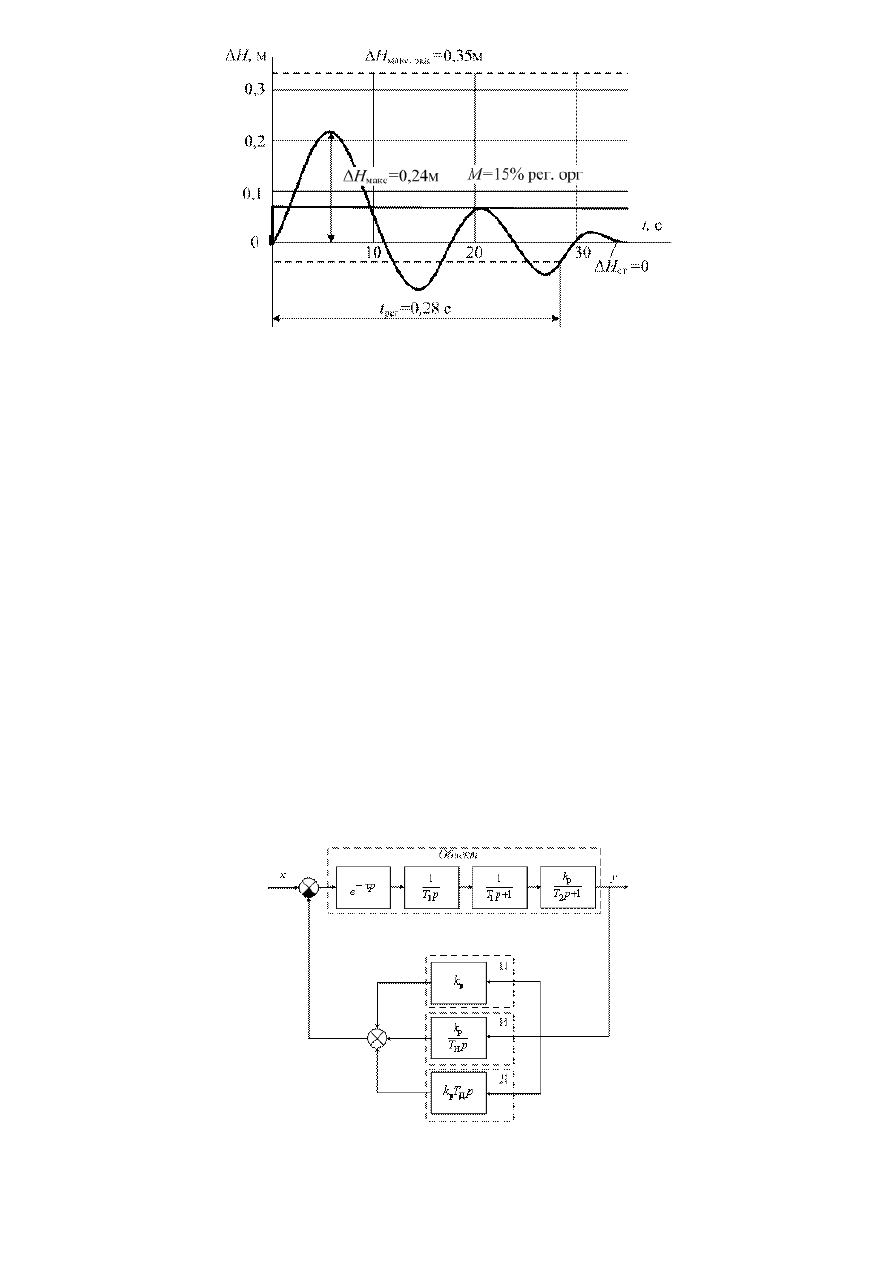
В результате расчета построим характеристику переходного процесса по по лученным значениям
(рис. 18). Переходный процесс изображается в отклоне ниях от заданного значения уровня H
0
= 6,0 м
(принятого за «0» отсчета), вре мя (в секундах) — реальное.
Из графика переходного процесса (рис. 18) видно, что:
а) статическая ошибка
(характерно для астатических систем) т.е. меньше
;
б) максимальное отклонение регулируемой величины (динамическая ошибка)
меньше
;
в) время регулирования t
рег
= 28 с меньше заданного значения равного 45 с (по истечении t
рег
значение
).
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
20/28
Рис. 18. Характеристика переходно го процесса в АСР уровня гидравли ческого объекта, полученная расчетом на ЭВМ
Ha основании полученных результатов можно сделать вывод, что регулятор и его параметры выбраны
правильно и это обеспечивает требуемое качество регулирования.
В случае если полученные показатели качества регулирования не удовлетво ряют заданным условиям, то
проводится проверка предыдущих расчетов и анализов. Если ошибки не определены, то следует изменить
параметры настройки ре гулятора последовательно на 5...15% и просчитать в каждом случае снова пе реходный
процесс. В случае улучшения качества регулирования при измененных параметрах регулятора методом
приближений найти необходимые парамет ры регулятора.
В некоторых случаях необходимо заменить регулятор на более совер шенный или ввести в цепь
регулятора корректирующие элементы.
После расчетов динамических па раметров АСР выбираем промышлен ный тип регулятора и отдельные
его устройства (блоки), параметры ко торых удовлетворяют рекомендациям расчетов с 20...30%-ным запасом.
Это необходимо в каждом случае уточненной настройки регуляторов на технологическом оборудовании, так
как отдельные параметры объекта мо гут изменяться со временем.
4. Построение переходных процессов в АСР.
Построение гра фика переходного процесса в АСР при выбранном типе регулятора и найден ных
параметрах его настройки проводится для проверки правильности произве денных расчетов. (Задача о выборе
регулятора, о его параметрах, качестве регу лирования может быть решена полностью на ЭВМ.)
Для построения переходных процессов в системе, структурная схема может быть полу чена путем
исключения отдельных звеньев из структурной схемы, представлен ной на рис. 19
Рис. 19. Структурная схема автоматизированной системы для построения переходных характеристик
Если, например, исследуемая АСР содержит объект с самовыравниваем 1-го порядка с запаздыванием и
ПИ-регулятор, то следует принять Т
1
= 0, Т
3
= 0, Т
д
= 0.