ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 44
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФГБОУ ВО «КУРГАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Кафедра «Технология машиностроения, металлорежущие станки и
инструменты»
КУРСОВАЯ РАБОТА
по дисциплине «Теория автоматического управления»
Тема: «Анализ конструктивных особенностей станка модели»
Вариант №5
Содержание
Содержание 1
Введение 2
Исходные данные 3
Задание на курсовую работу: 4
Задание 1 5
Задание 2 6
Задание 3 9
Задание 4 12
Задание 5 15
Задание 6 18
Задание 7 19
Задание 8 21
Выводы 25
Литература 26
Введение
Теория автоматического управления (ТАУ) является одной из наиболее важных общетехнических дисциплин, и ее изучение опирается на ряд фундаментальных общеобразовательных и общетехнических дисциплин – математики, информатики, общей электротехники и электроники и т.д.
Целью настоящей курсовой работы является самостоятельное закрепление теоретических знаний по непрерывным линейным системам автоматического управления, полученных на лекциях, практических занятиях и лабораторных работах. Курсовая работа предусматривает самостоятельное выполнение синтеза и анализа следящей САУ. Синтез производится с помощью ЛАЧХ и ЛФЧХ.
Система интегрированного программирования MathCad является хорошим инструментальным средством для решения задач ТАУ. Основы пользования пакетом изучались в курсе «Спец. Главы информатики». При решении задач по курсу ТАУ необходимо знать и использовать дополнительные возможности пакета, как формирование функций из отрезков прямых линий, определение корней линейных алгебраических уравнений, решение трансцендентных уравнений, нанесение на график логарифмической шкалы, интерполяция и математическая регрессия для данных, представленных в виде векторов.
Приобретенные навыки приемов и методов, применяемых при анализе и синтезе систем автоматического управления, будут использованы в изучении дисциплин «Автоматизированный электропривод», «Моделирование систем».
Исходные данные
Структурная схема:
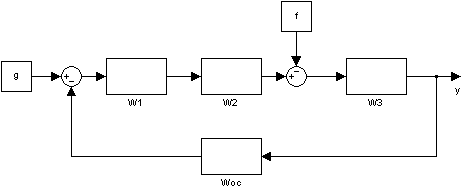
Рисунок 1 – Структурная схема системы
ПФ звеньев и их параметры:
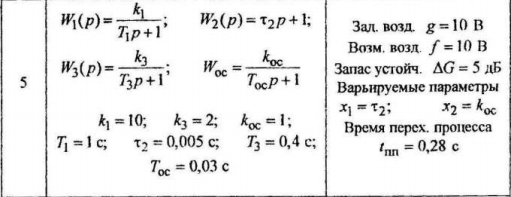
Задание на курсовую работу:
1. Определить типовые звенья, входящие в структуру САУ.
2 Определить передаточные функции САУ и ее характеристический полином.
3. По критерию устойчивости Гурвица определить устойчивость САУ, рассчитать граничное значение коэффициента передачи разомкнутой цепи и построить область устойчивости САУ относительно варьируемых параметров Х1 и Х2.
4. Построить статические и внешние характеристики для заданной САУ и для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде ΔG. Рассчитать статизм для обоих вариантов САУ и сравнить полученные результаты.
5. Для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде ΔG, рассчитать асимптотическую и точную ЛАЧХ, точную логарифмическую фазовую частотную характеристику и определить запас устойчивости по фазе Δφ.
6. Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде ΔG, рассчитать амплитудную (АЧХ) и вещественную (ВЧХ) частотные характеристики и определить по ним показатели качества регулирования.
7. Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде ΔG, рассчитать переходные характеристики по задающему g и возмущающему f воздействиями, определить по ним показатели качества регулирования и сравнить результаты с ранее полученными.
8. Исходя из заданного времени переходного процесса tпп и перерегулирования δ=25% провести синтез последовательного корректирующего устройства и рассчитать переходную характеристику скорректированной САУ по задающему воздействию. Определить показатели качества регулирования для этой САУ и сравнить их с ранее рассчитанными.
Задание 1
В состав системы входят следующие звенья:
Задание 2
С помощью MathCad рассчитываем ПФ по задающему и возмущающему воздействиям:
При расчёте ПФ по входу g полагаем, что возмущающее воздействие отсутствует:
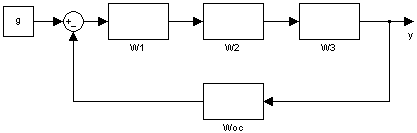
Рисунок 2 – Расчёт ПФ системы по входу g
ПФ отдельных звеньев:
ПФ разомкнутой системы по входу g рассчитывается как произведение ПФ всех звеньев, включённых в замкнутый контур:
ПФ замкнутой системы по входу g:

Теперь рассчитаем ПФ по входу f: При расчёте ПФ по входу f полагаем, что задающее воздействие отсутствует:
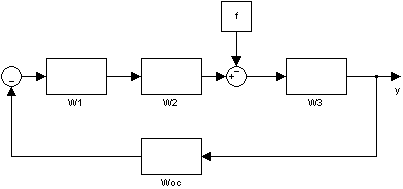
Рисунок 3 – Расчёт ПФ системы по входу f
ПФ разомкнутой системы по входу f:
ПФ замкнутой системы по входу f:

Знаменатели рассчитанных ПФ по входам g и f совпадают, следовательно, расчёты произведены верно.
Задание 3
Рассчитаем устойчивость замкнутой системы алгебраическим критерием Гурвица:
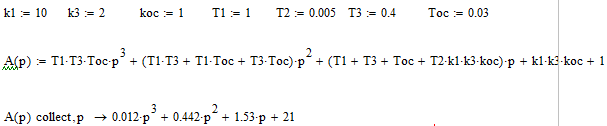
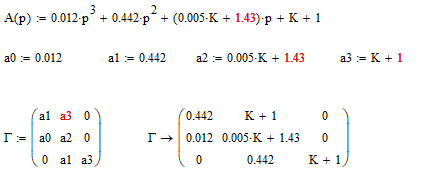
Выделяем характеристический полином замкнутой системы – знаменатель ПФ:
Подставляем числовые коэффициенты:
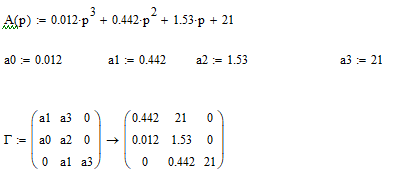
По необходимому условию Гурвица, все коэффициенты характеристического полинома должны быть положительными. Данное условие выполняется.
По достаточному условию Гурвица, определители всех порядков матрицы Гурвица должны быть положительными.
Формируем матрицу Гурвица:
Рассчитываем определители матрицы Гурвица:

Определители всех 3 порядков матрицы Гурвица положительные, следовательно, исходная система в замкнутом состоянии будет устойчива.
Найдём граничное условие коэффициента передачи, при котором система будет находиться на границе устойчивости. Полагаем общий коэффициент передачи, равным произвдению коэффициентов усиления отдельных звеньев:
Формируем матрицу Гурвица:
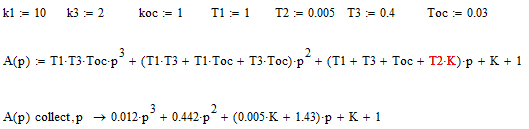
Находим определитель 3 порядка:

Найдём решение 3 определителя матрицы Гурвица:
Система будет устойчива при -1 < K < 63,336. Отметим, что значение -1 соответствует апериодической границе устойчивости, а корень 63,336 соответствует колебательной границе устойчивости.
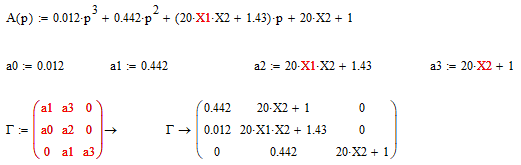
Построим границу устойчивости в вариации параметров Х1, Х2.
По условию, в качестве параметра Х1 используется постоянная времени Т2; в качестве Х2 используется коэффициент усиления koc.
Тогда

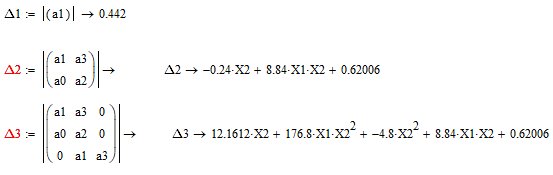
Формируем матрицу Гурвица:
Рассчитываем определители:
Найдём решение Х1 для 2 и 3 определителей матрицы Гурвица относительно Х2:
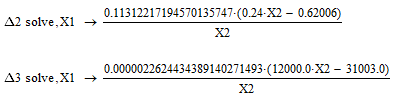
Построим зависимость Х1(Х2). Поскольку, по необходимому условию Гурвица, все коэффициенты должны быть положительными, выбираем только 1 четверть:
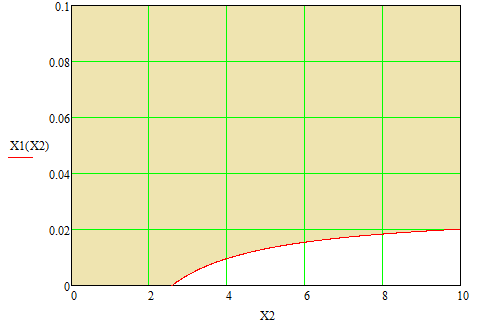
Рисунок 4 – Область устойчивости параметров Х1 и Х2
На рисунке 4 представлена граница устойчивости параметров Х1 и Х2. Красная линия соответствуют колебательной границе устойчивости. При выборе пары чисел Х1 и Х2, лежащих на данной линии, замкнутая система будет находиться на колебательной границе устойчивости. При выборе пары чисел Х1 и Х2, лежащих правее/ниже данной линии, замкнутая система будет неустойчива. При выборе пары чисел Х1 и Х2, лежащих левее данной линии (закрашенная область), замкнутая система будет устойчива.
Задание 4
Ранее мы определили, что критический коэффициент усиления разомкнутой системы: К ≈ 63,336.
Подставляя исходные коэффициенты k1 и k3, определим критический коэффициент X2 = kос:
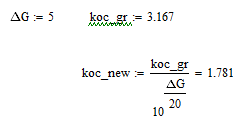
Далее находим новое значение kос, при котором будет обеспечиваться требуемый запас устойчивости ΔG = 5 дБ:
Внешняя характеристика САУ при изменении возмущающего воздействия от нуля до fm рассчитывается по передаточным функциям замкнутой САУ при p=0, то есть по формуле
Найдём значения Wzg(0) и Wzf(0):
Строим внешние характеристики для исходной (y(f)) и скорректированной (y1(f)) систем:
Уточнение задающего воздействия, обеспечивающего одинаковую выходную величину для обеих САУ при = 0
Строим характеристики:
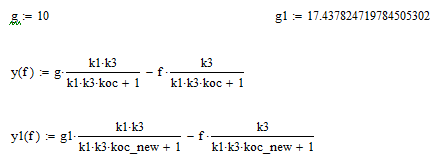
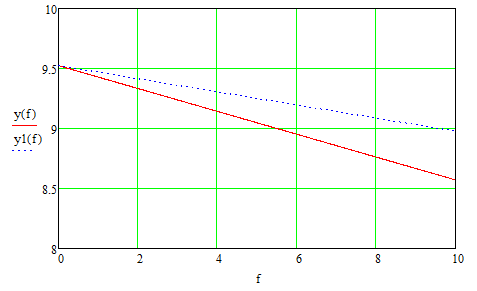
Рисунок 5 – Внешние характеристики
Легко видеть, что при новом значении kос внешняя характеристика САУ менее жесткая (то есть при одном и том же значении f наблюдается меньшее отклонение выходной величины от заданного значения).
Значение выходной величины при f = 0:
Значения выходной величины при f = 10: