Файл: Курсовая работа по дисциплине Теория конечных автоматов (наименование дисциплины).docx
Добавлен: 08.11.2023
Просмотров: 342
Скачиваний: 19
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
ЭТАП 2. Присвоение технологической индексации
Этап 3. Технологическая схема с индексацией
Этап 4. Структуризация технологической схемы
Полная технологическая схема КА
Описание функций состояния технологического процесса (по технологическим группам объектов)
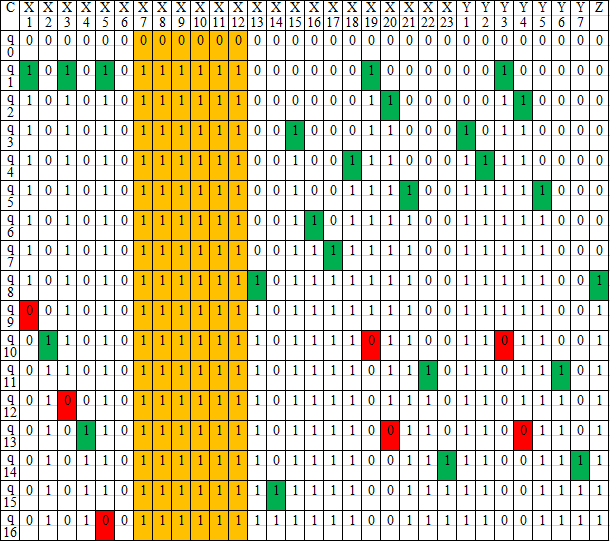
Таблица состояний (исполнение 1)
Таблица состояний (исполнение 2)
Таблица состояний (исполнение 1)
В таблицах 4-29 представлены состояния во время исполнения.
Таблица 4.1. -Нулевое состояние КА.

-Начало включения транспортной системы.
Таблица 5. -Открытие Шп1. Датчики Uпн1-Uпн3 X1=1, X3=1, X5=1 включают привод ДШп1 (Y3=1), который открывает шиберную заслонку Шп1 (Х19=1).

Таблица 6. -Открытие Шп2. Сигнал Х19=1 включает ДШп2 (Y4=1). Состояние Шп2 (Х20=1) меняется на открытое.

Таблица 7. -Включение Тк2. Сигнал Х20=1 включает привод ДТк2 (Y1=1), начинает работать транспортер Тк2. Датчик РКС Тк2 указывает о работе (X15=1).

Таблица 8. -Включение Тк1. Сигнал Х15=1 включает привод ДТк1 (Y2=1), начинает работать транспортер Тк1. Датчик РКС Тк1 указывает о работе (X18=1).

Таблица 9. -Открытие Шр1. Сигнал Х18=1 включает привод ДШр1 (Y5=1), открывается шиберная заслонка Шр1 (X21=1).

Таблица 10. -Наличие в начале Тк1. Датчик Мн1 меняет свое состояние из-за наличия материала в начале транспортера Тк1 (Х16=1).

Таблица 11. -Наличие в конце Тк1. Датчик Мо1 меняет свое состояние из-за наличия материала в конце транспортера Тк1 (Х17=1).

Таблица 12. -Наличие в начале Тк2. Датчик Мн2 меняет свое состояние из-за наличия материала в начале транспортера Тк2 (Х13=1).
Транспортная система находится в динамическом состоянии. Выход КА Z=1.

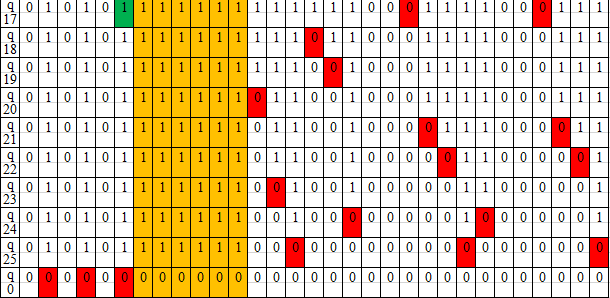
Таблица 13. -Пополнение выше уровня Uпн1. После преодоления нижнего уровня в БМп1 меняется сигнал датчика Uпн1 (X1=0).

Таблица 14. -Закрытие Шп1. Датчик Uпв1 Х2=1 сигнализирует о том, что приемный бункер БМп1 заполнен. Отключается привод ДШп1 (Y3=0), что приводит к закрытию шиберной заслонки Шп1 (X19=0).

Таблица 15. -Открытие Шр2. Сигнал Х19=0 включает привод ДШр2 (Y6=1), открывается шиберная заслонка Шр2 (Х22=1).

Таблица 16. -Пополнение выше уровня Uпн2. После преодоления нижнего уровня в БМп2 меняется сигнал датчика Uпн2 (X3=0).

Таблица 17. -Закрытие Шп2. Датчик Uпв2 Х4=1 сигнализирует о том, что приемный бункер БМп2 заполнен. Отключается привод ДШп2 (Y4=0), что приводит к закрытию шиберной заслонки Шп2 (X20=0).

Таблица 18. -Открытие Шр3. Сигнал Х20=0 включает привод ДШр3 (Y7=1), открывается шиберная заслонка Шр3 (Х23=1).

Таблица 19. -Наличие в конце Тк2. Датчик Мо2 меняет свое состояние из-за наличия материала в конце транспортера Тк2 (Х14=1).

Таблица 20. -Пополнение выше уровня Uпн3. После преодоления нижнего уровня в БМп3 меняется сигнал датчика Uпн3 (X5=0).

Таблица 21. -Закрытие Шр1. Датчик Uпв3 Х6=1 сигнализирует о том, что приемный бункер БМп3 заполнен. Отключается привод ДШр1 (Y5=0), что приводит к закрытию шиберной заслонки Шр1 (X21=0).

Таблица 22. -Отсутствие в начале Тк1. Датчик Мн1 меняет свое состояние из-за отсутствия материала в начале транспортера Тк1 (Х16=0).

Таблица 23. -Отсутствие в конце Тк1.
Датчик Мо1 меняет свое состояние из-за отсутствия материала в конце транспортера Тк1 (Х17=0).

Таблица 24. -Отсутствие в начале Тк2. Датчик Мн2 меняет свое состояние из-за отсутствия материала в начале транспортера Тк2 (Х13=0).

Таблица 25. -Закрытие Шр2. Сигнал Х13=0 отключает привод ДШр2 (Y6=0), закрывается шиберная заслонка Шр2 (X22=0).

Таблица 26. -Закрытие Шр3. Сигнал X22=0 отключает привод ДШр3 (Y7=0), закрывается шиберная заслонка Шр3 (X23=0).

Таблица 27. -Отсутствие в конце Тк2. Датчик Мо2 меняет свое состояние из-за отсутствия материала в конце транспортера Тк2 (Х14=0).

Таблица 28. -Отключение Тк1. Сигнал Х14=0 отключает привод ДТк1 (Y2=0). Датчик РКС Тк1 (X18=0) указывает остановку транспортера Тк1.

Таблица 29. -Отключение Тк2. Сигнал Х18=0 отключает привод ДТк2 (Y1=0). Датчик РКС Тк2 (X15=0) указывает остановку транспортера Тк2.
Транспортная система находится в статическом состоянии. Выход КА Z=0.

Таблица 4.2. -Нулевое состояние.

Таблица состояний (исполнение 2)
Таблица 30. Состояния исполнения.
Граф КА
На рисунке 4 показан граф состояний КА.
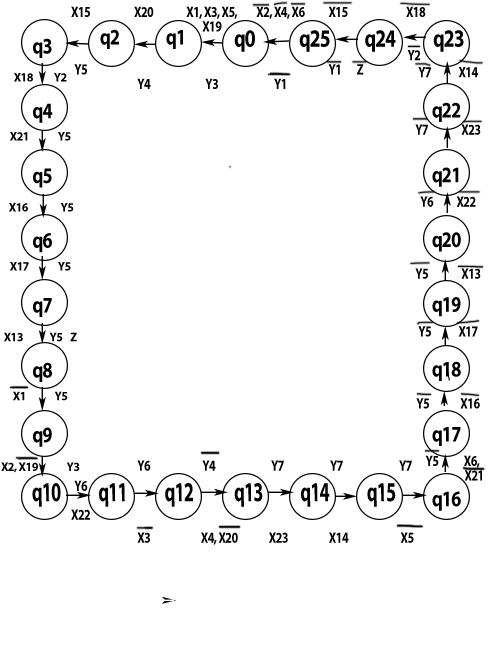
Рис.4. Граф состояний и значений переходов состояний
Приборная реализация функций КА
На рисунке 5 представлена приборная реализация функций конечного автомата.
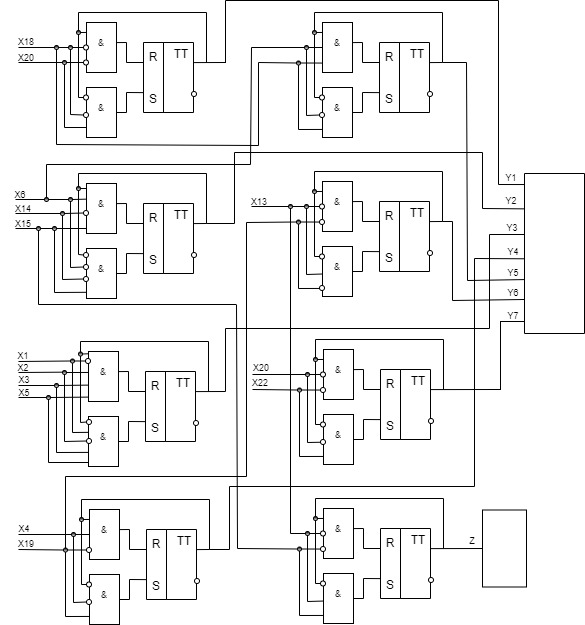
Рис.5 Приборная реализация функций конечного автомата
ЗАКЛЮЧЕНИЕ
В ходе данной курсовой работы были разработаны схемы, таблицы и граф, приведены формулы. Все это описывает работу конечного автомата, который состоит из трех расходных, трех приемных бункеров и двух транспортных конвейеров и предназначен для транспортировки сыпучих материалов под действием гравитационных сил.
Результатом выполнения курсовой работы стало полное описание конечного автомата, которое можно использовать для написания программного кода при проектировании механизма транспортировки для предприятий военно-промышленного комплекса, пищевой, деревообрабатывающей и химической промышленности и т.д.
Список ИСПОЛЬЗОВАННЫХ источников
Спросить у ребят про список литература
1. Федосеева, Л.И. Основы теории конечных автоматов и формальных языков [Электронный ресурс] : учебное пособие / Л.И. Федосеева, Р.М. Адилов, М.Н. Шмокин. — Электрон. дан. — Пенза : ПензГТУ (Пензенский государственный технологический университет), 2013. — 141 с. — Режим доступа: http://e.lanbook.com/books/element.php?pl1_id=62703 — Загл. с экрана.
2. Марченков, С.С. Конечные автоматы [Электронный ресурс] : . — Электрон. дан. — М. : Физматлит, 2008. — 56 с. — Режим доступа: http://e.lanbook.com/books/element.php?pl1_id=59510 — Загл. с экрана.
3. Синтез цифровых автоматов / Глушков В. М.[ Электронный ресурс]. — 1962. — 476 с. – Режим доступа: http://library.mirea.ru/ebooks/8744 б) дополнительная литература: 1. Дискретная математика для инженера / Кузнецов О. П., АдельсонВельский Г. М.. — 1988. — 409 с 2. Прикладная теория цифровых автоматов : Учебник для вузов / А. Я. Савельев. — М.: Высш. шк., 1987. — 272 с.