Файл: Курсовая работа по дисциплине Динамика и прочность энергетических машин.docx
Добавлен: 22.11.2023
Просмотров: 62
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИФГБОУ ВО «Брянский государственный технический университет»
Кафедра «Турбиностроение»
Курсовая работа
по дисциплине «Динамика и прочность энергетических машин»
Документы текстовые
ДиПЭМ.22.Мт.РР.ПЗ
Всего листов 37
Объект исследования и постановка задачи
Объектом исследования данной работы является рабочее колесо турбины. Рабочее колесо турбины - часть ротора турбины, состоящая из диска и расположенных на нём рабочих лопаток, в результате взаимодействия которых с потоком газа происходит преобразование энергии в механическую работу. Рабочая лопатка (рис. 1,а) состоит из пера 2, которое обтекается газом, замка 5 для соединения с диском, нижней полки 3 для образования внутренней поверхности проточной части, бандажной полки 1 для уплотнения радиального зазора между лопатками и корпусом турбины и снижения низкочастотных колебаний лопатки и ''ножки'' 4 для уменьшения теплового потока из пера в замок. Диск (рис. 1,б) состоит из обода 6 с пазами для крепления лопаток, а также полотна 7 и втулки 8 - несущих элементов, воспринимающих нагрузки от центробежных сил и крутящего момента.
Рис. 1. Рабочие лопатки и рабочее колесо турбины
В канале, образованном нижней 3 и бандажной 1 полками, в области пера 2 лопатки происходит преобразование кинетической энергии рабочего тела в механическую работу на валу турбины. Сила воздействия рабочего тела передаётся через лопатки, закрепленные в пазах на ободе 6 диска замками 5, на вал турбины при помощи втулки 8, которая крепится на него путём посадки с натягом и фиксации шпонками.
Задачей исследования является расчет напряженно-деформированного состояния рабочего диска компрессора газотурбинной установки с использованием компьютерных программных комплекса ''Универсальный механизм'' и “Femap”
1.1 Моделирование рабочего колеса газовой турбины в программном комплексе ''Универсальный механизм''. Импорт 3-D модели рабочего колеса в ''Универсальный механизм''
Созданная в программном комплексе ''Компас-3D'' модель рабочего колеса газовой турбины была загружена в программу. Инструменты → импорт из CAD → STL (рис. 2). Она представляет собой полную сборку рабочего колеса газовой турбины. Модель состоит из диска с рабочими лопатками. Рабочие лопатки крепятся в ободе диска с помощью хвостовиков елочного типа.
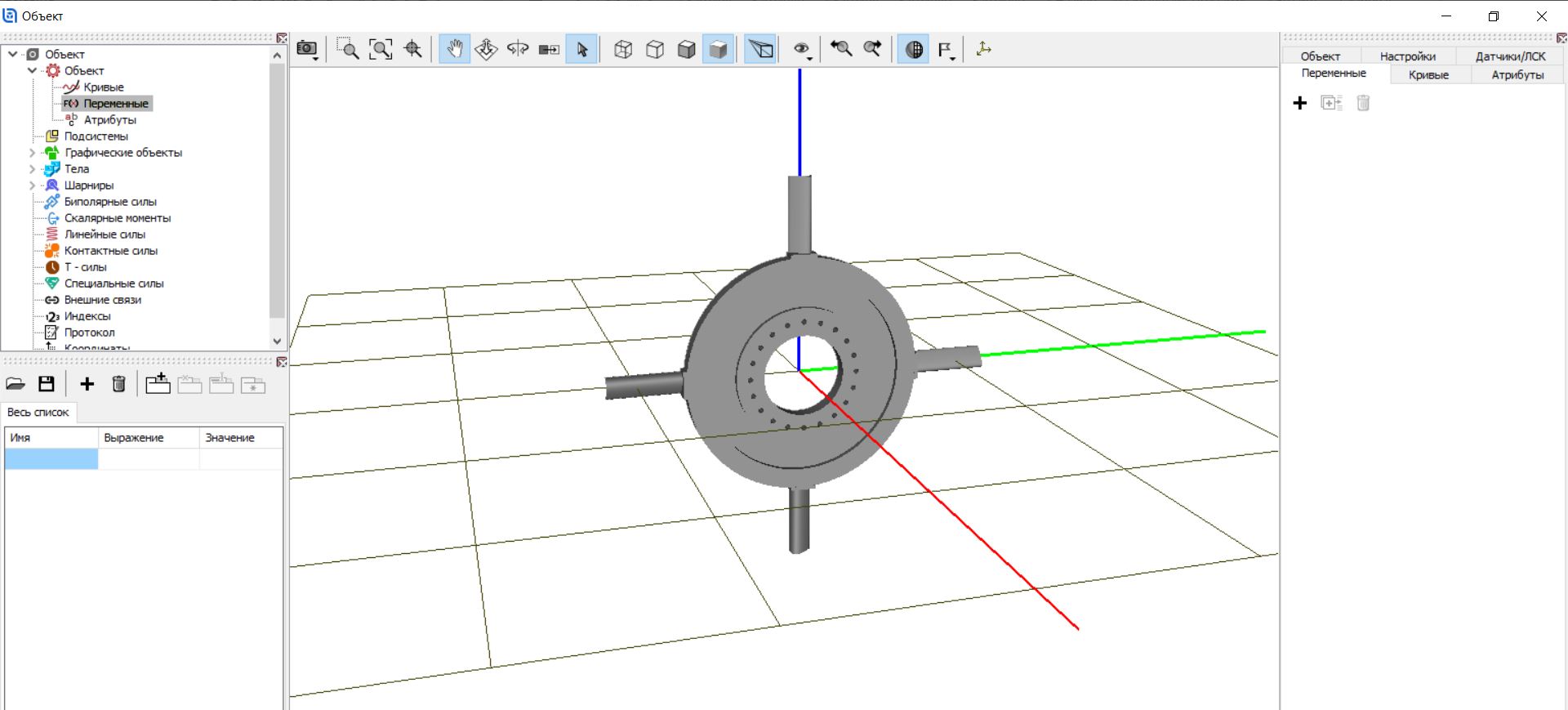
Рис. 2. Модель рабочего колеса газовой турбины
Назначьте имя твердому телу ''Диск'' (рис. 3).
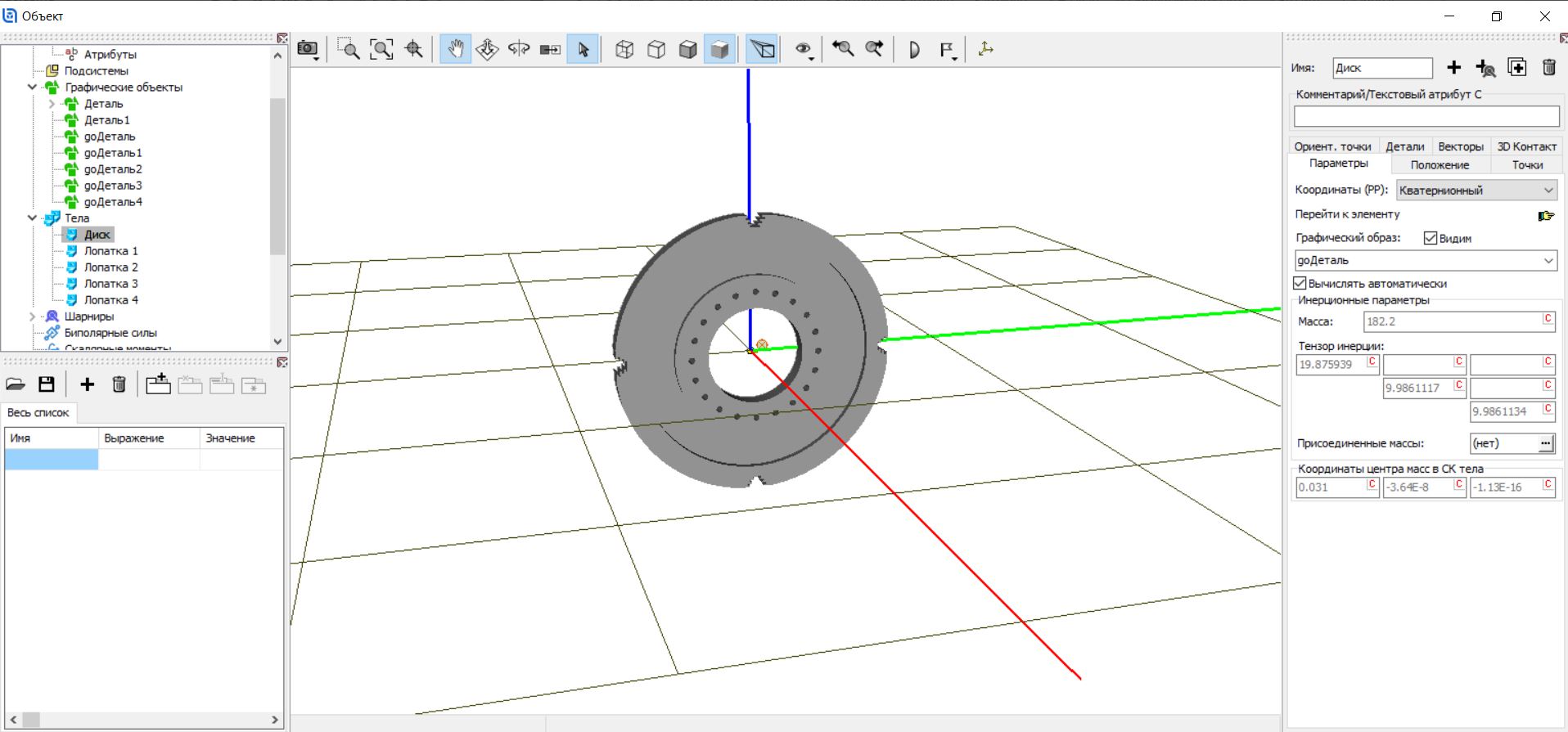
Рис. 3. Назначение имени твердому телу (диск компрессора)
Назначьте имя твердым телам (рабочие лопатки) ''Лопатка 1'' - ''Лопатка 4'' (рис. 4).
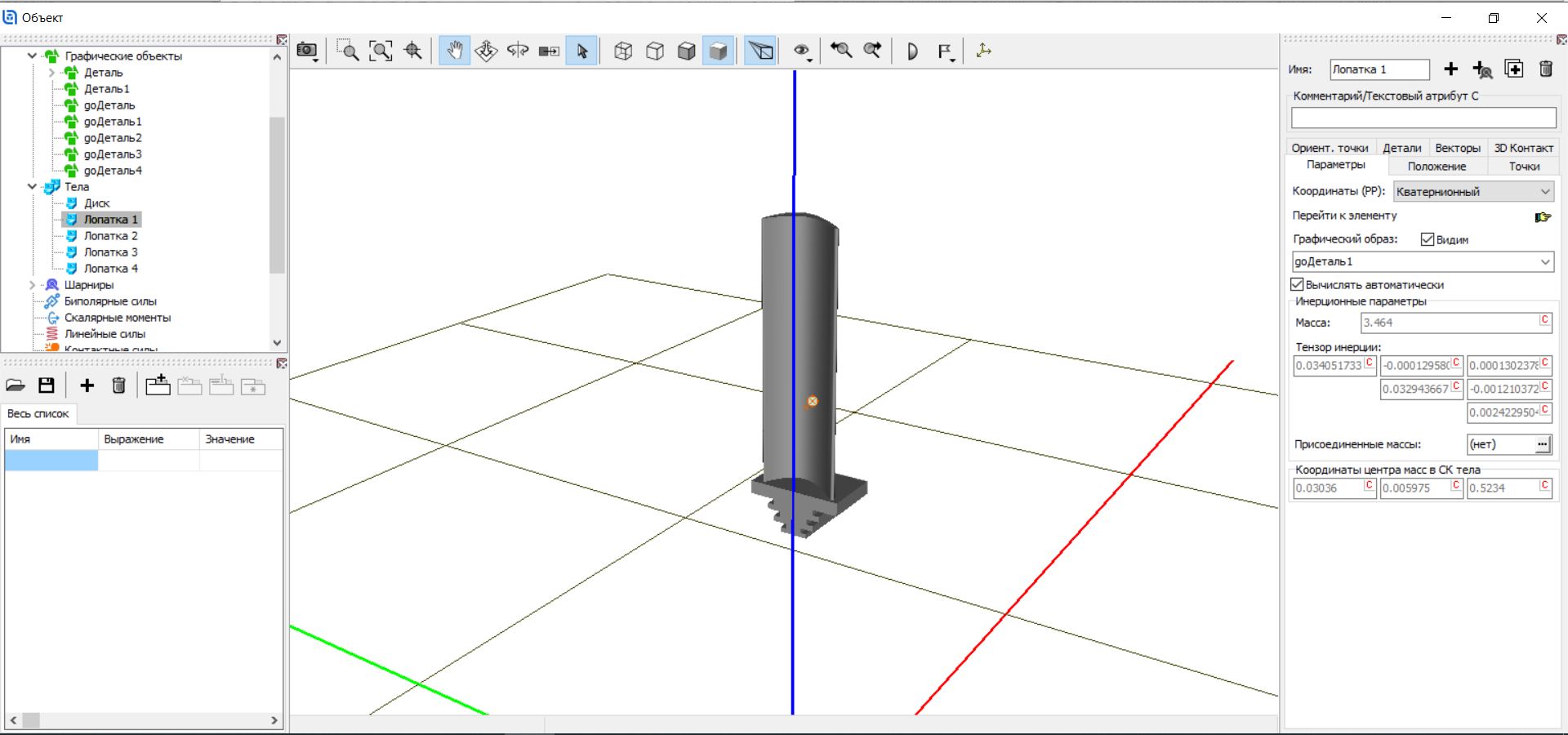
Рис. 4. Назначение имени твердым телам (рабочие лопатки газовой турбины)
Активируйте режим ''Автоматический расчет инерционных параметров'' (рис. 5). В этом режиме инерционные параметры рассчитываются автоматически по графическому образу, назначенному телу. Данная операция выполняется для твердых тел ''Диск'', ''Лопатка 1'' - ''Лопатка 4''.
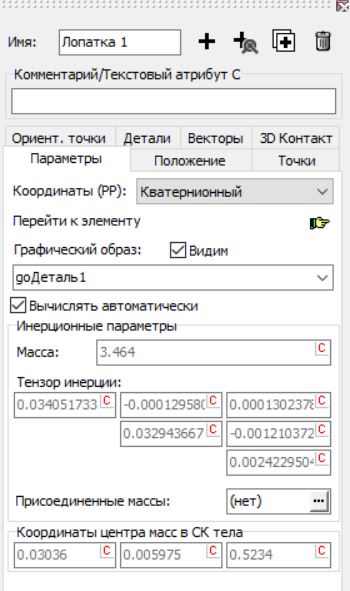
Рис. 5. Автоматическое вычисление инерционных параметров по графическому образу
1.2 Создание шарниров
Для формирования реалистичного поведения каждой детали во время эксперимента, программой ''Универсальный механизм'' по умолчанию были созданы шарниры. Тип шарниров - 6 ст. свободы. Это универсальный тип шарниров, который позволяет ограничивать любые перемещения и углы поворота.
Шарнир для диска
В ходе эксперимента вал с диском совершает вращательные движения по оси z и не должен перемещаться по осям x, y, z (рис. 6). Назначьте первым телом Base0.
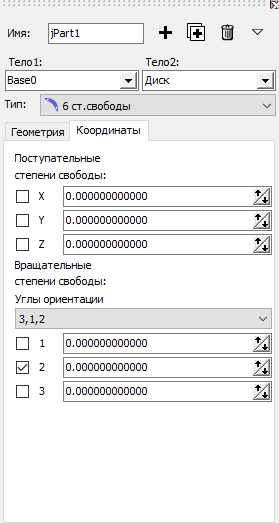
Рис. 6. Шарнир для диска
Шарнир для рабочих лопаток турбины
Рабочие лопатки газовой турбины могут совершать поступательные движения по осям y, z и вращательные движения. Поэтому после добавления шарнира, были поставлены все галочки для поступательных и вращательных степеней свободы (рис. 7). Назначьте первым телом
Base0. Данная операция повторяется для всех лопаток рабочего колеса.
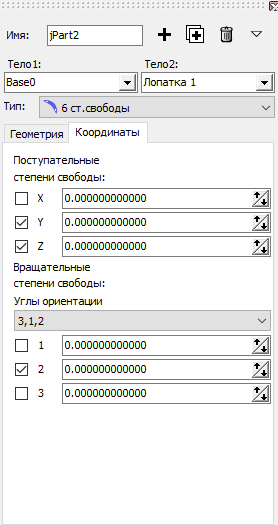
Рис. 7. Шарнир для рабочих лопаток
1.3 Создание контактных сил
Контактные силы показывают какие детали, и в каких местах взаимодействуют при симуляции процесса нагружения. Для их приложения требуется в окне списка элементов выбрать графу контактные силы → добавить элемент в группу ''Контактные силы'' и выбрать нужный тип, в данном случае ''точки-плоскость''. Далее, в окне ''инспектор'' надо указать тела, между которыми возникает контакт (рис. 8). Телами, между которыми возникает контакт, являются рабочая лопатка и диск.
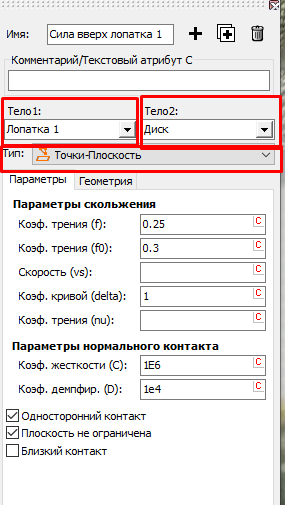
Рис. 8. Создание контактных сил
В разделе ''геометрия'' указать координаты точек контакта хвостовика рабочей лопатки турбины с диском. Также необходимо задать координаты точек плоскости контакта и внешней нормали (рис. 9). Стоит отметить, что в данной модели создадим 4 контактне силы, которые показывают взаимодействие хвостовика рабочей лопатки с диском газовой турбины.
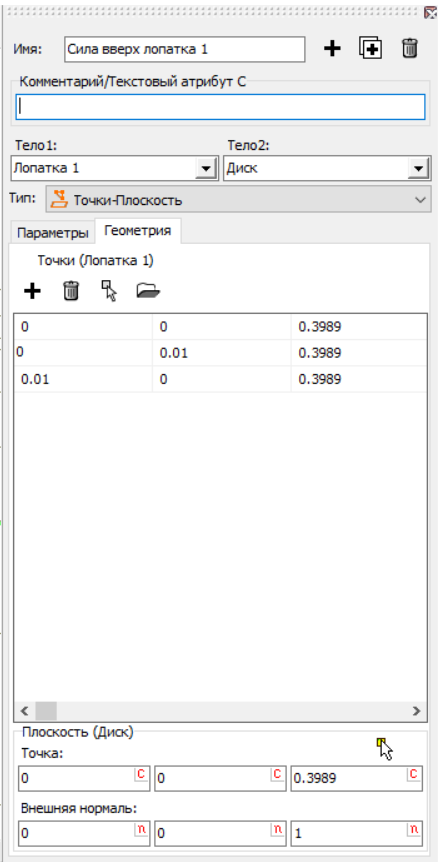
Рис. 9. Внесение значений координат точек контакта хвостовика рабочей лопатки с диском турбины
Хвостовик рабочей лопатки - диск
Для создания контактных сил между этими деталями были выбраны следующие координаты точек контакта и вектор нормали (табл. 1 - табл. 8).
Таблица 1. Координаты точек контакта хвостовика лопатки 1 с диском турбины
| Контактная сила 1 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0 | 0.3989 |
| 2 | 0 | 0.01 | 0.3989 |
| 3 | 0.01 | 0 | 0.3989 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0 | 0.3989 |
| Внешняя нормаль | 0 | 0 | 1 |
Продолжение таблицы 1
| Контактная сила 2 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0 | 0.4469 |
| 2 | 0 | 0.01 | 0.4469 |
| 3 | 0.01 | 0 | 0.4469 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0 | 0.4469 |
| Внешняя нормаль | 0 | 0 | -1 |
| Контактная сила 3 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | -0.05 | 0.44 |
| 2 | 0.01 | -0.05 | 0.44 |
| 3 | 0.01 | -0.05 | 0.442 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | -0.05 | 0.44 |
| Внешняя нормаль | 0 | 1 | 0 |
| Контактная сила 4 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0.05 | 0.44 |
| 2 | 0.01 | 0.05 | 0.44 |
| 3 | 0.01 | 0.05 | 0.442 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0.05 | 0.44 |
| Внешняя нормаль | 0 | -1 | 0 |
Таблица 2. Координаты точек контакта хвостовика лопатки 2 с диском турбины
| Контактная сила 1 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | -0.3989 | 0 |
| 2 | 0 | -0.3989 | 0.01 |
| 3 | 0.01 | -0.3989 | 0 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | -0.3989 | 0 |
| Внешняя нормаль | 0 | -1 | 0 |
| Контактная сила 2 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | -0.4469 | 0 |
| 2 | 0 | -0.4469 | 0.01 |
| 3 | 0.01 | -0.4469 | 0 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | -0.4469 | 0 |
| Внешняя нормаль | 0 | 0 | -1 |
| Контактная сила 3 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | -0.44 | -0.05 |
| 2 | 0.01 | -0.44 | -0.05 |
| 3 | 0.01 | -0.442 | -0.05 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | -0.44 | -0.05 |
| Внешняя нормаль | 0 | 0 | 1 |
| Контактная сила 4 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | -0.44 | 0.05 |
| 2 | 0.01 | -0.44 | 0.05 |
| 3 | 0.01 | -0.44 | 0.05 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | -0.44 | 0.05 |
| Внешняя нормаль | 0 | 0 | -1 |
Таблица 3. Координаты точек контакта хвостовика лопатки 3 с диском турбины
| Контактная сила 1 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0 | -0.3989 |
| 2 | 0 | 0.01 | -0.3989 |
| 3 | 0.01 | 0 | -0.3989 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0 | -0.3989 |
| Внешняя нормаль | 0 | 0 | -1 |
| Контактная сила 2 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0 | -0.4469 |
| 2 | 0 | 0.01 | -0.4469 |
| 3 | 0.01 | 0 | -0.4469 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0 | -0.4469 |
| Внешняя нормаль | 0 | 0 | 1 |
| Контактная сила 3 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0.05 | -0.44 |
| 2 | 0.01 | 0.05 | -0.44 |
| 3 | 0.01 | 0.05 | -0.442 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0.05 | -0.442 |
| Внешняя нормаль | 0 | -1 | 0 |
Продолжение таблицы 3
| Контактная сила 4 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | -0.05 | -0.44 |
| 2 | 0.01 | -0.05 | -0.44 |
| 3 | 0.01 | -0.05 | -0.442 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | -0.05 | -0.44 |
| Внешняя нормаль | 0 | 1 | 0 |