Файл: Курсовая работа по дисциплине Динамика и прочность энергетических машин.docx
Добавлен: 22.11.2023
Просмотров: 64
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Таблица 4. Координаты точек контакта хвостовика лопатки 4 с диском турбины
| Контактная сила 1 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0.3989 | 0 |
| 2 | 0 | 0.3989 | 0.01 |
| 3 | 0.01 | 0.3989 | 0 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0.3989 | 0 |
| Внешняя нормаль | 0 | 1 | 0 |
| Контактная сила 2 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0.3989 | 0 |
| 2 | 0 | 0.3989 | 0.01 |
| 3 | 0.01 | 0.3989 | 0 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0.3989 | 0 |
| Внешняя нормаль | 0 | -1 | 0 |
| Контактная сила 3 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0.44 | 0.05 |
| 2 | 0.01 | 0.44 | 0.05 |
| 3 | 0.01 | 0.442 | 0.05 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0.44 | 0.05 |
| Внешняя нормаль | 0 | 0 | -1 |
| Контактная сила 4 | |||
| Точки (хвостовик рабочей лопатки) | Координаты | ||
| x | y | z | |
| 1 | 0 | 0.44 | -0.05 |
| 2 | 0.01 | 0.44 | -0.05 |
| 3 | 0.01 | 0.442 | -0.05 |
| Вектор нормали (плоскость Вал с диском) | |||
| Точки | 0 | 0.44 | -0.05 |
| Внешняя нормаль | 0 | 0 | 1 |
1.4 Подготовка к моделированию
Проверим корректность и полноту описания модели. В дереве элементов модели выберите Протокол (Ctrl+Alt+P). Если модель описана корректно, то в инспекторе появится сообщение о том, что ошибок нет, (рис. 10). При наличии ошибок моделирование невозможно. Кликнув левой кнопкой мыши по строке сообщения об ошибке или предупреждении можно перейти к описанию соответствующего элемента.
Сохраните модель под именем gas_turbine_rotor. Перейдите в программу моделирования UM Simulation. Для этого выберите пункт главного меню Объект | Моделирование… (Ctrl+M). Автоматически будет запущена программа UM Simulation, в которой откроется модель рабочего колеса.
Рис. 10. Анализ корректности и полноты описания модели
1.5 Симуляция в ''Универсальном механизме''
После того, как создаются 3-D модель требуемого объекта и все силы, действующие на него, можно запустить процесс симуляции его поведения при напряженно-деформированном состоянии.
Анимационное окно
Чтобы наглядно во всех деталях рассмотреть вращение рабочего колеса газовой турбины, следует открыть анимационное окно (рис. 11). Одно анимационное окно открывается программой по умолчанию. Если по каким-то причинам вы не видите анимационного окна, то откройте его в программе UM Simulation с помощью пункта меню Инструменты | Анимационное окно… Появится новое анимационное окно с изображением загруженной модели.
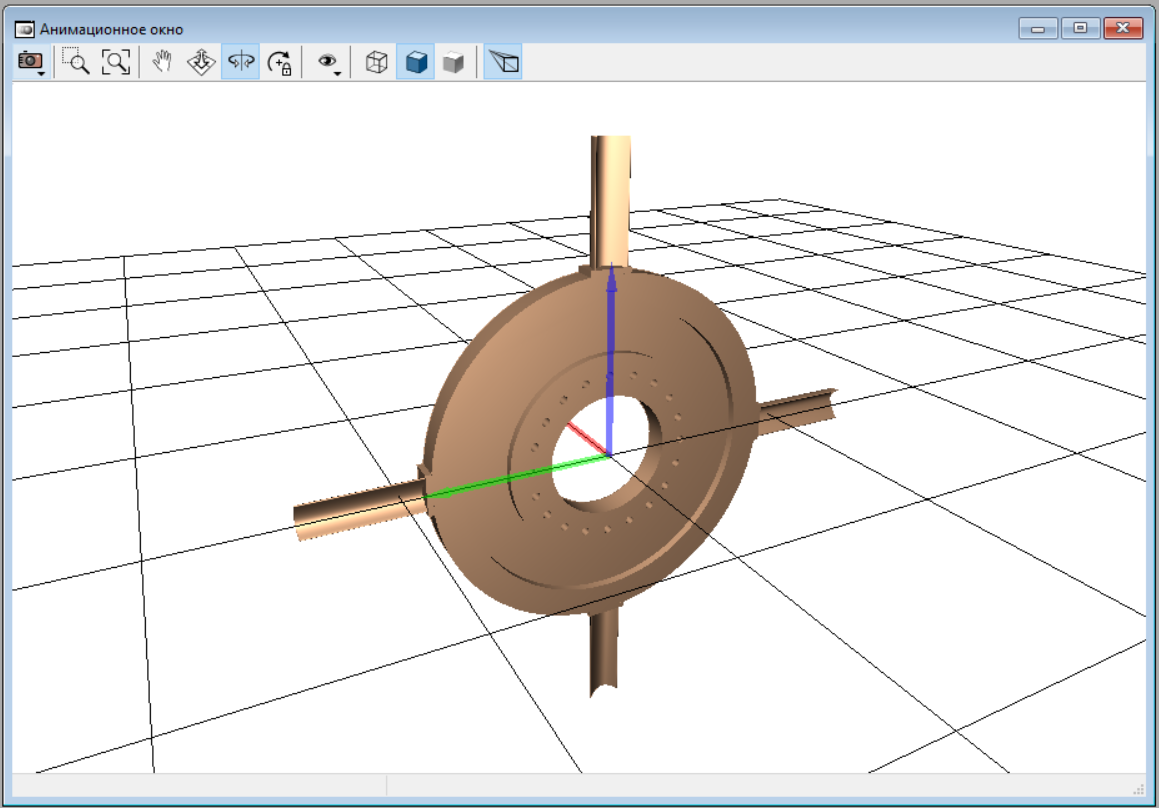
Рис. 11. Анимационное окно в программе UM Simulation
Чтобы посмотреть анимацию вращения рабочего колеса газовой турбины, необходимо запустить процесс ''Моделирование'', нажав на кнопку, указанную стрелочкой на (рис. 12).
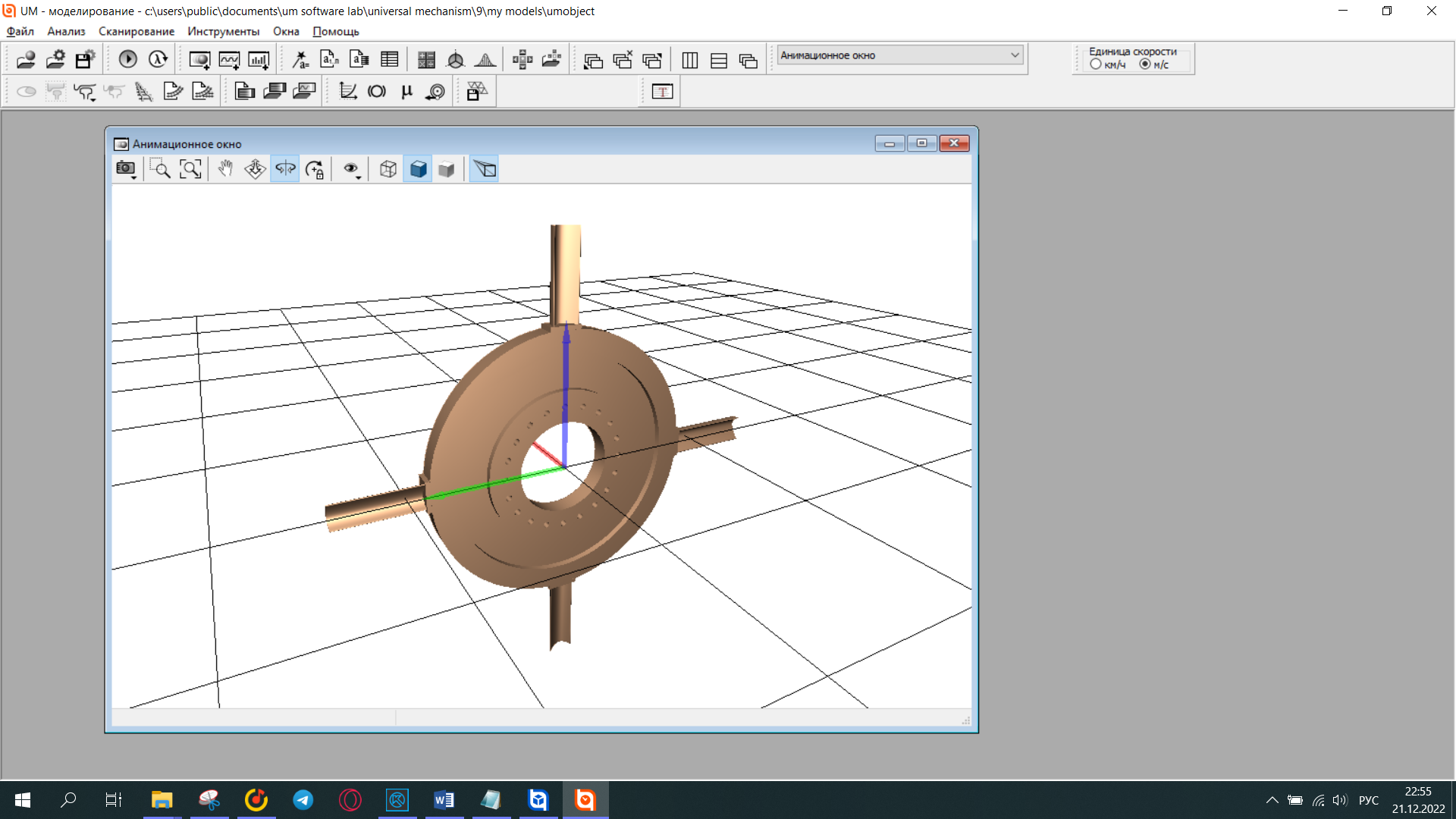
Рис. 12. Запуск процесса ''Моделирование''
В окне ''Инспектор моделирования объекта'' зададим параметры для процесса моделирования (рис. 13).
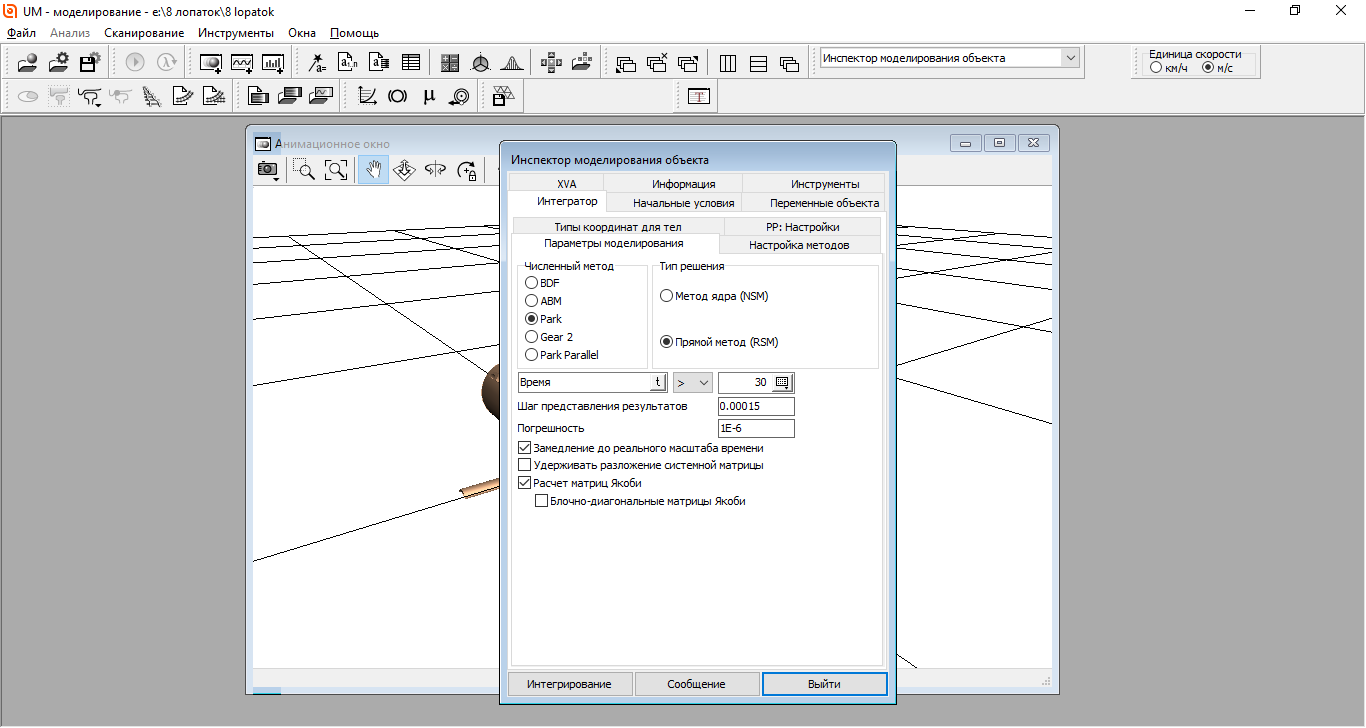
Рис. 13. Окно ''Инспектор моделирования объекта''
Чтобы посмотреть анимацию вращения рабочего колеса, необходимо нажать на кнопку ''Интегрирование'' (рис. 14).
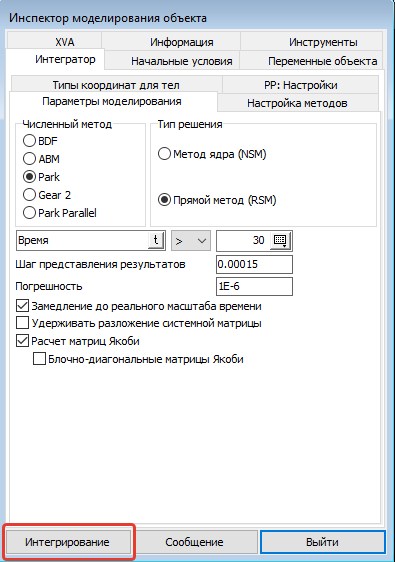
Рис. 14. Запуск анимации вращения рабочего колеса
Мастер переменных и графическое окно
Мастер переменных позволяет задавать необходимые значения параметров, для проведения процесса симуляции, а графическое окно, в свою очередь отображает требуемые зависимости, исходя из заданных переменных. В данной работе требовалось построить график суммы всех сил, включая нормальные силы и силы трения, которые возникают между рабочей лопаткой и диском при вращении ротора газовой турбины.
Для нахождения этой силы потребовалось выбрать пункт меню Инструменты | Графическое окно… (рис. 15).
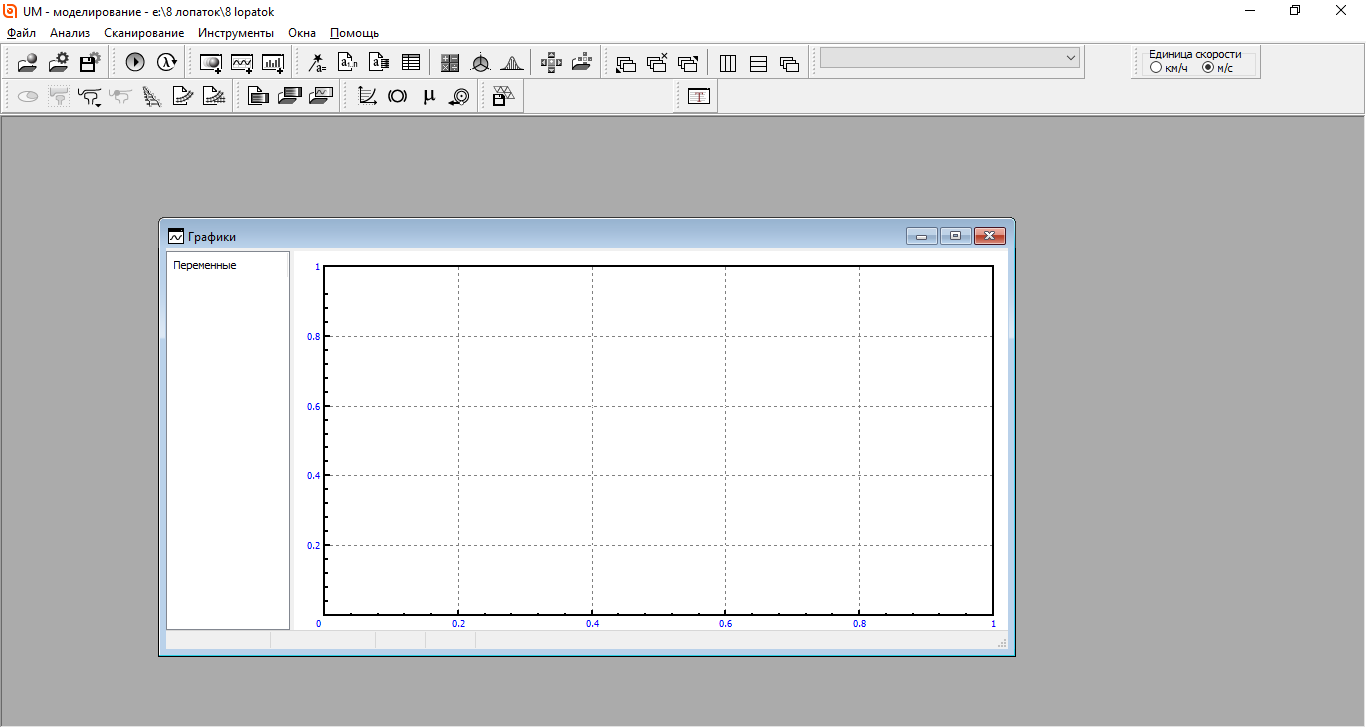
Рис. 15. Графическое окно
Далее откройте окно Мастера переменных. Выберите пункт меню Инструменты | Мастер переменных… Перейдите на вкладку Контактные силы. В качестве переменной был выбран главный вектор. Тип переменной - R, он характеризует сумму всех сил, включая нормальные силы и силы трения. Из списка контактных сил в окне Мастера переменных необходимо выбрать и перенести контактную силу с помощью кнопки, указанной стрелочкой на рисунке, в контейнер переменных (рис. 16).
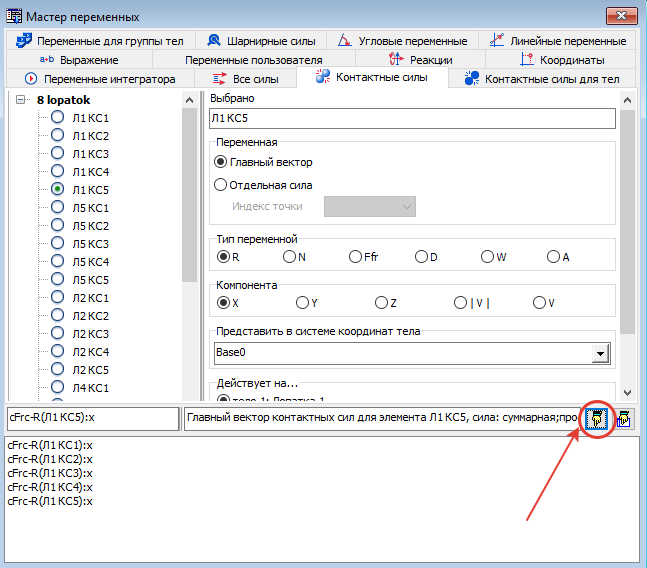
Рис. 16. Окно Мастера переменных в программе UM Simulation
Следующим этапом является перемещение контактных сил из контейнера переменных в графическое окно (рис. 17).
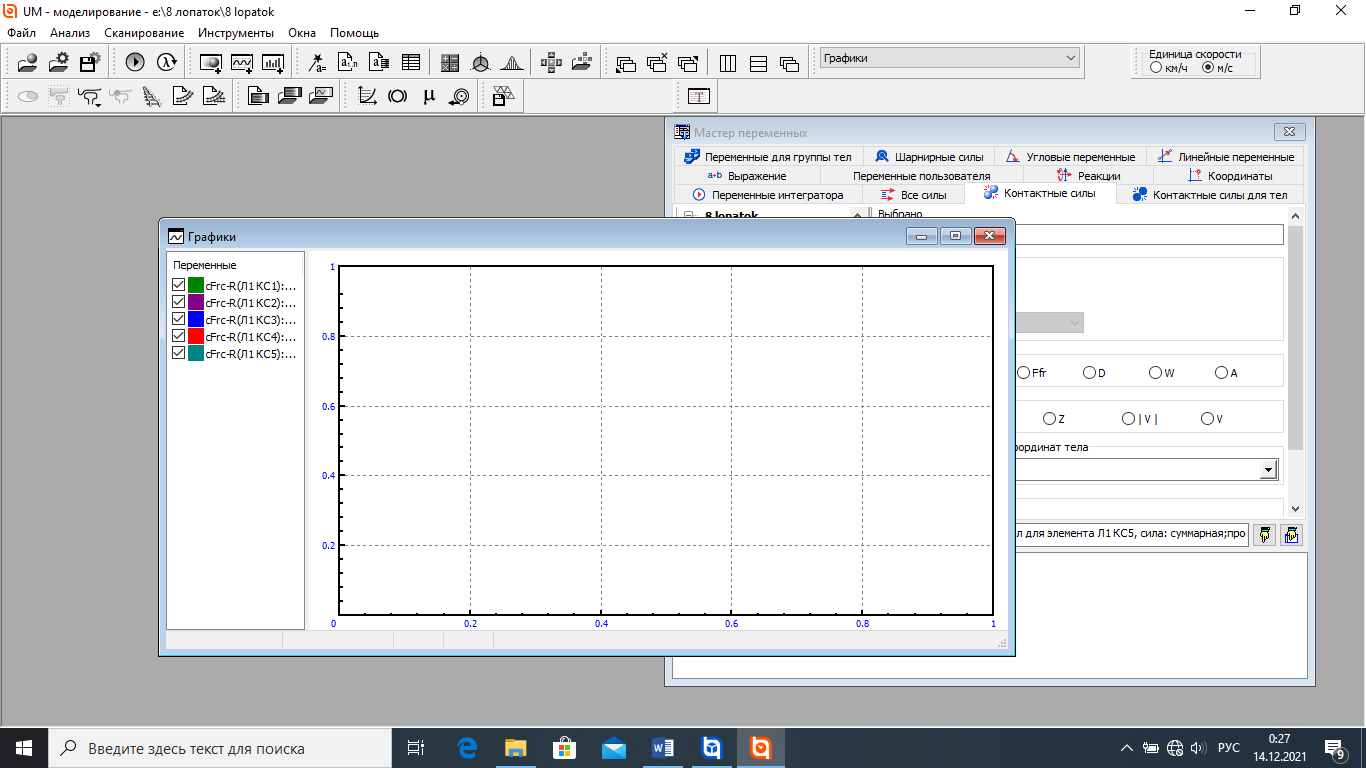
Рис. 17. Этап перемещения контактных сил из контейнера переменных в графическое окно
Запустим процесс построения графиков, нажав на кнопку, указанную на (рис. 18).
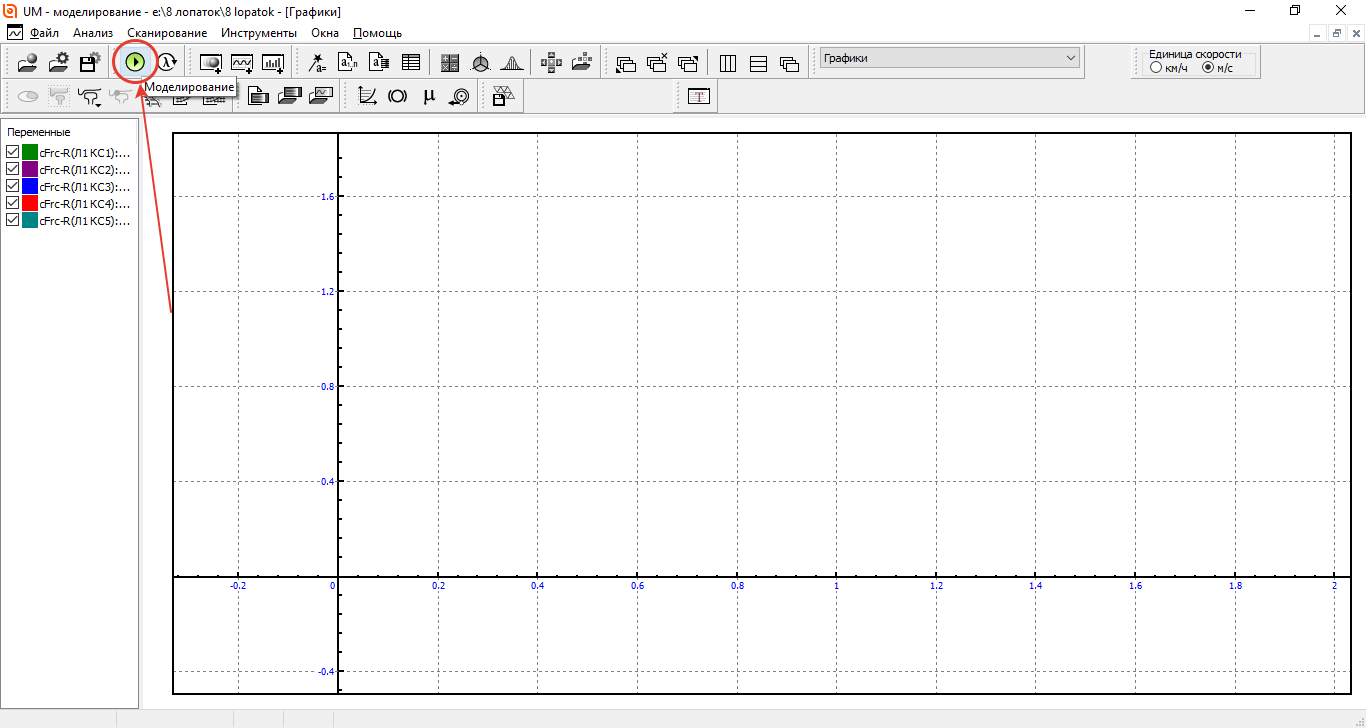
Рис. 18. Запуск процесса построения графиков
В открывшемся окне ''Инспектор моделирования объекта'' зададим параметры для процесса построения графиков. Для того, чтобы программа ''Универсальный механизм'' начала процесс построения графиков, необходимо нажать на кнопку ''Интегрирование'', указанную на (рис. 19).
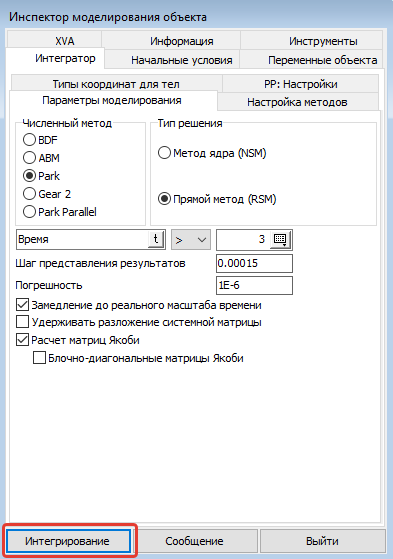
Рис. 19. Окно ''Инспектор моделирования объекта''
Результат построения графиков представлен на (рис. 20 - рис. 27).
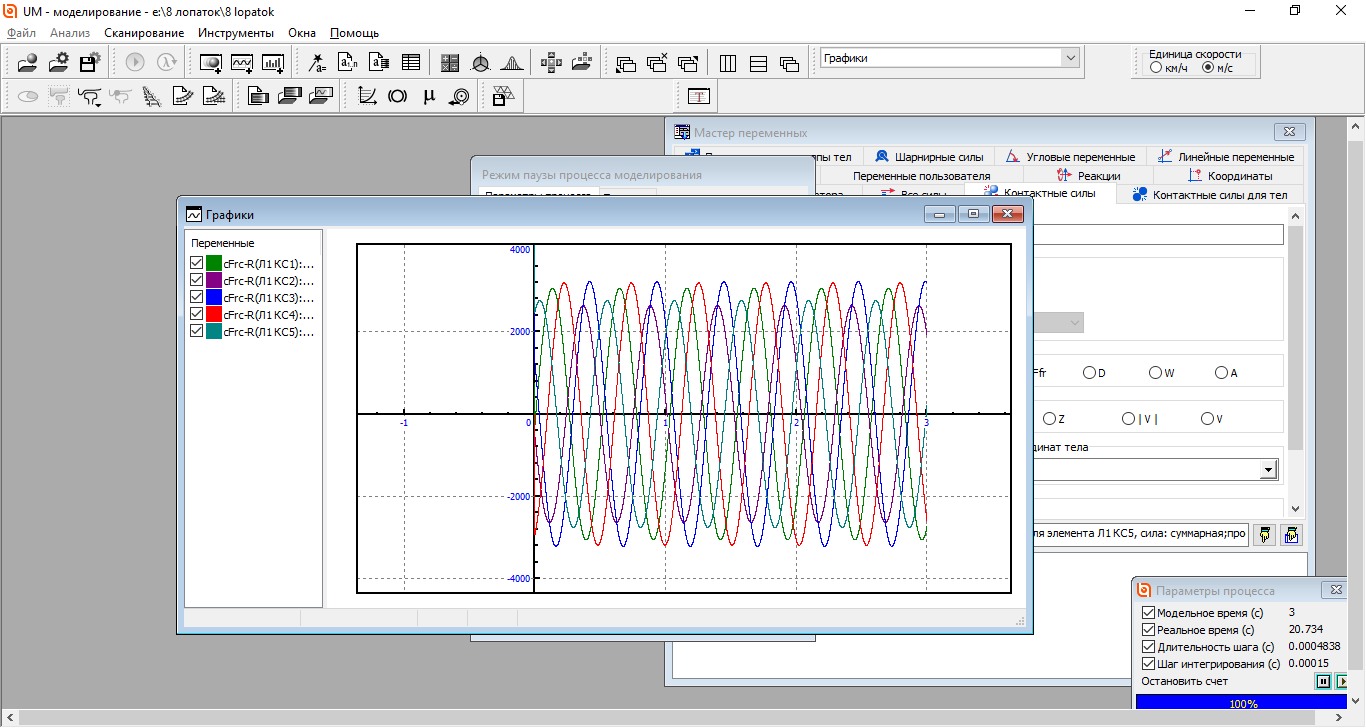
Рис. 20. График суммы всех сил, включая нормальные силы и силы трения, которые возникают между рабочей лопаткой 1 и диском при их нагружении
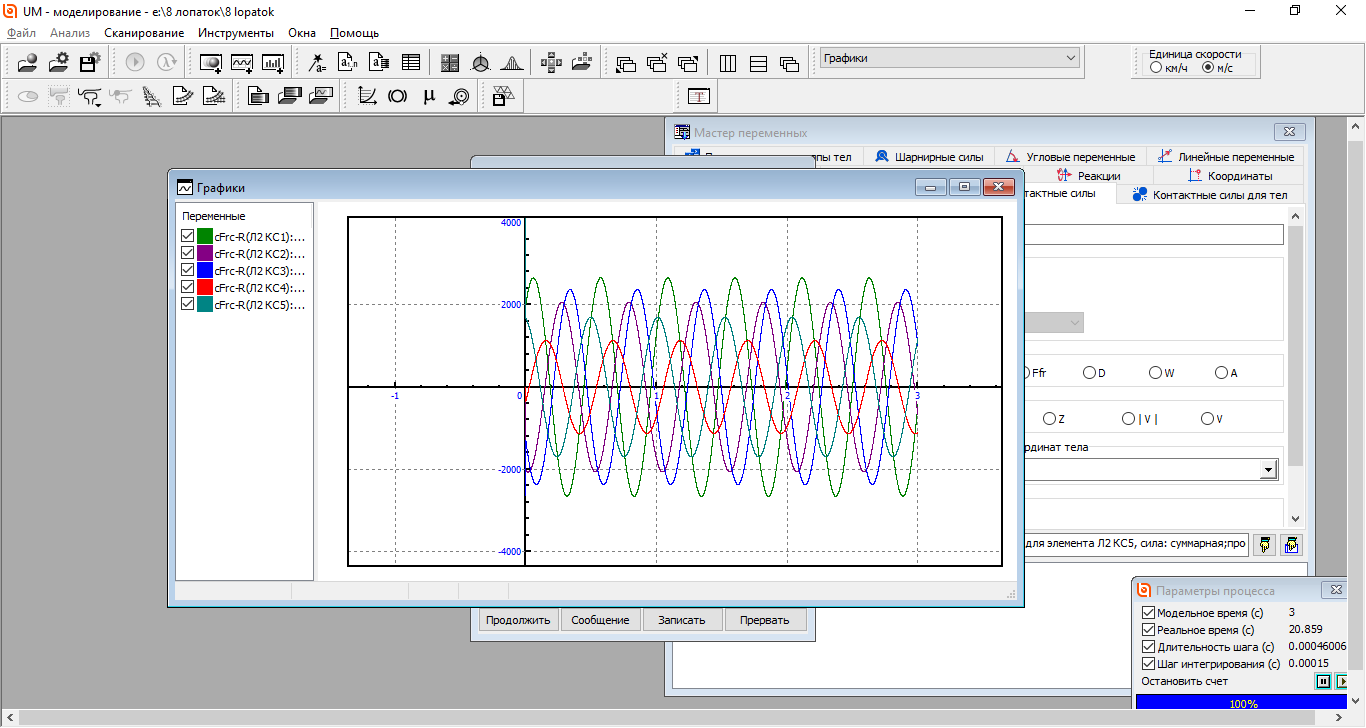
Рис. 21. График суммы всех сил, включая нормальные силы и силы трения, которые возникают между рабочей лопаткой 2 и с диском при их нагружении
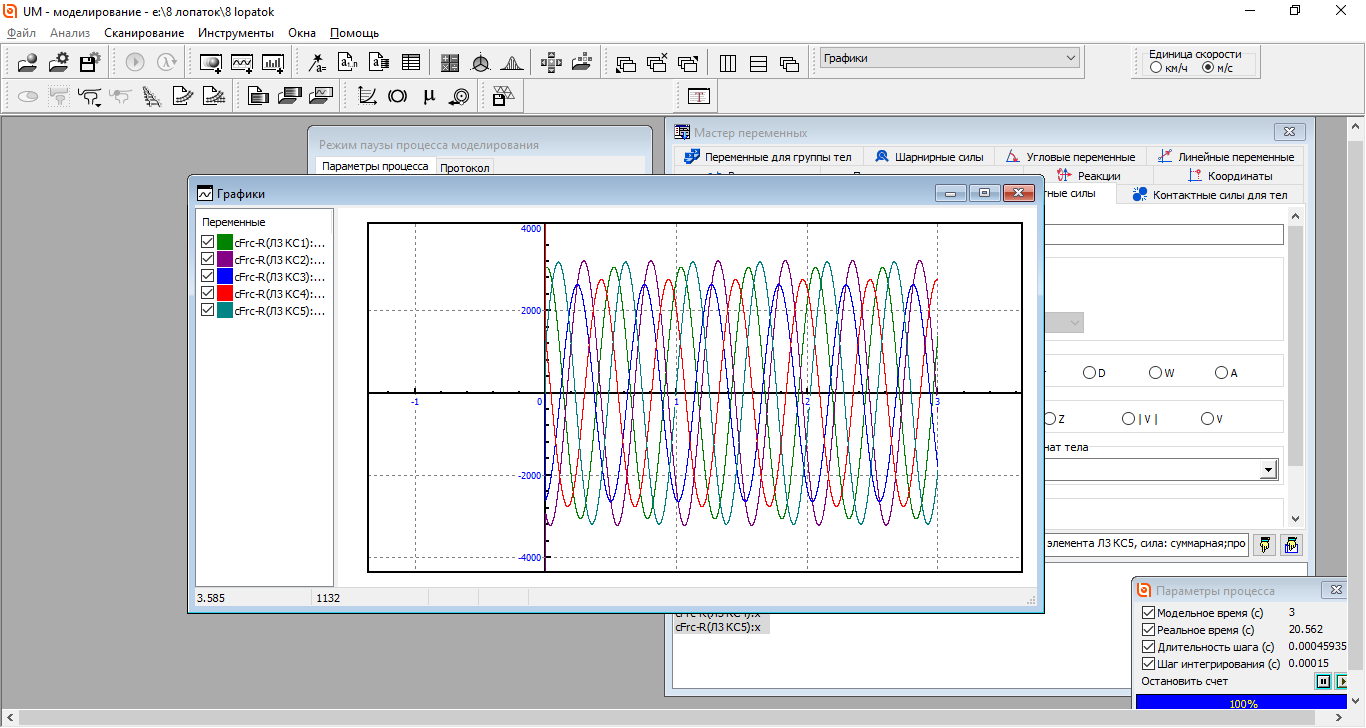
Рис. 22. График суммы всех сил, включая нормальные силы и силы трения, которые возникают между рабочей лопаткой 3 и диском при их нагружении
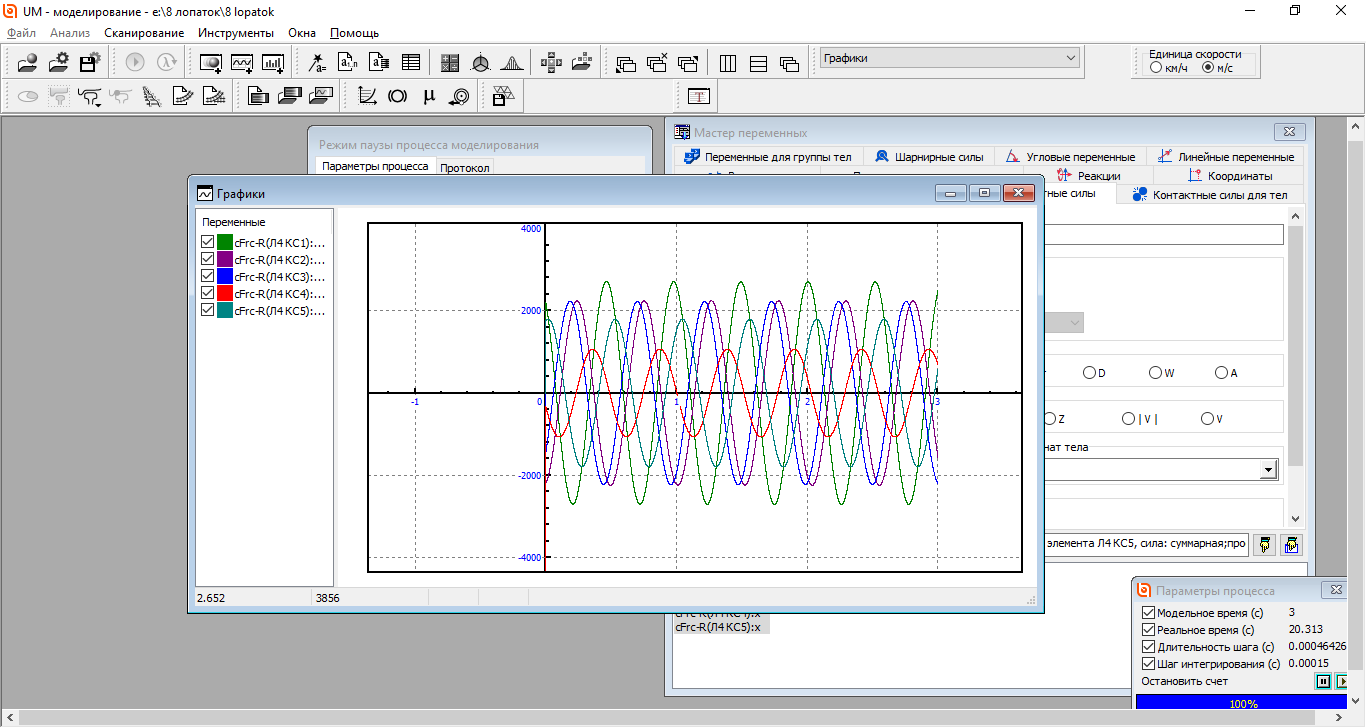
Рис. 23. График суммы всех сил, включая нормальные силы и силы трения, которые возникают между рабочей лопаткой 4 и диском при их нагружении
2 Моделирование лопатки турбины в программном комплексе «Femap».
2.1 Моделирование распределения температур.
Создание модели лопатки.
Конвертируем геометрию лопатки из файла STP (рис. 24)
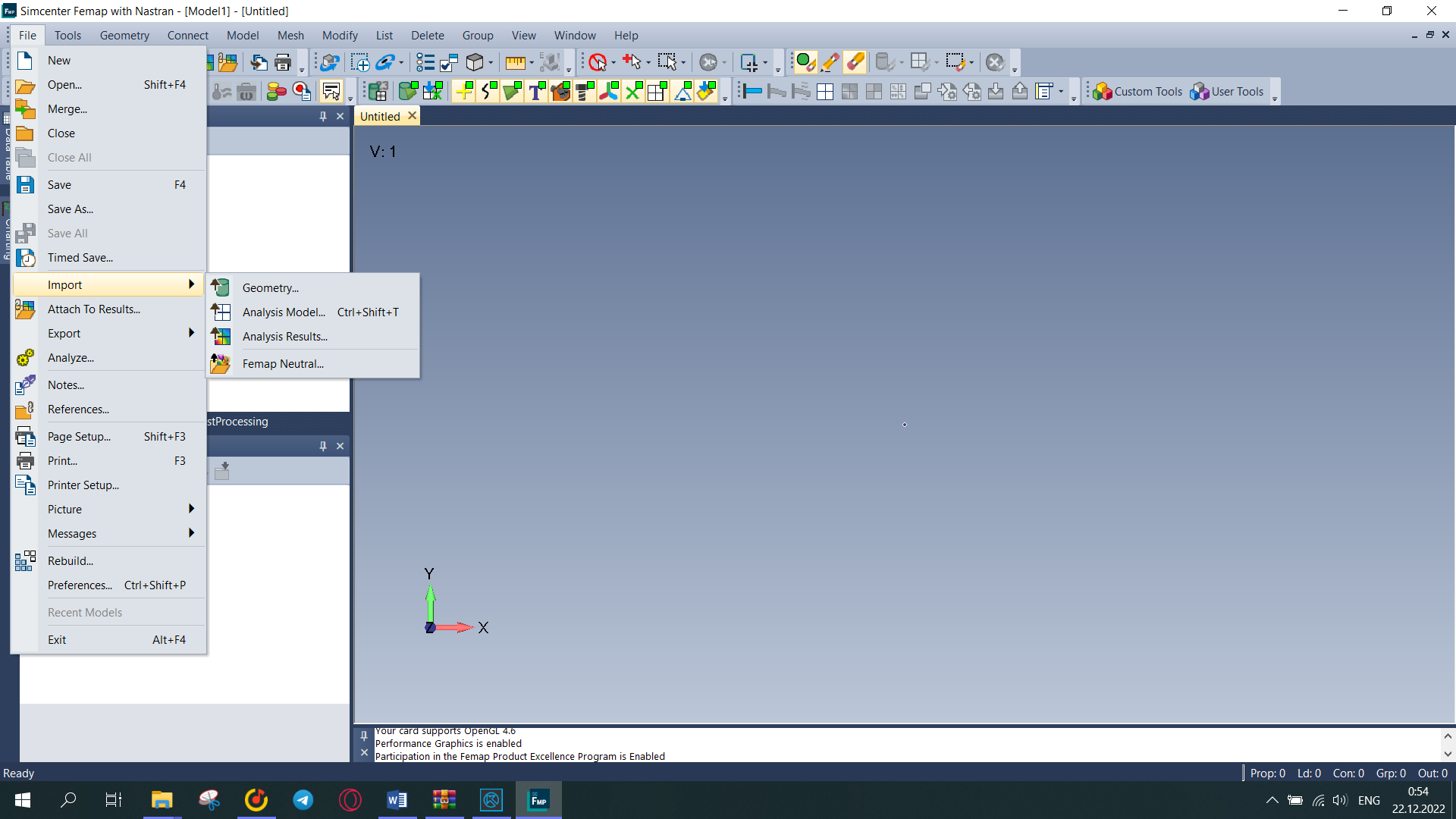
Рис. 24. Конвертация геометрии из файла STP
Следующий этап моделирования – создание материала: Model→Material. В появившемся окне (рис. 25) необходимо заполнить поля соответствующими значениями физико-механических свойств материала. В нашем случае это титан.
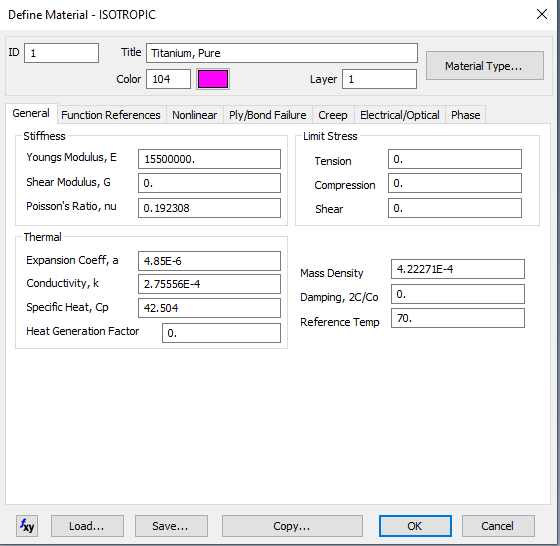 |
| Рис. 25. Задание физико-механических свойств |
Следующий этап – создание свойств самой лопатки. Переходим Model→Property (рис.26). В появившемся окне в поле Material выбираем «Титан» и переходим в раздел Elem/PropertyType… (рис.3).
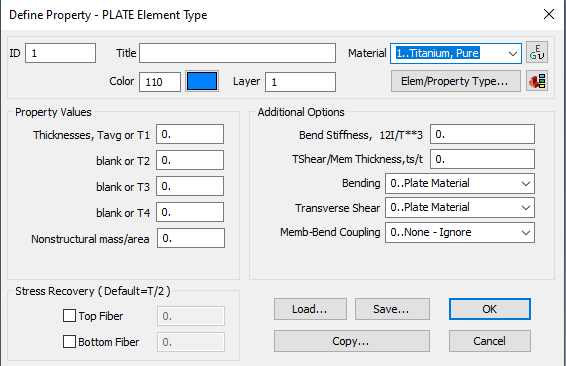 |
| Рис. 26. Создание свойств исследуемого объекта |
В области VolumeElements (Объёмные элементы) указываем Solid (Твёрдое тело), см. рис. 27. Свойства объекта созданы.
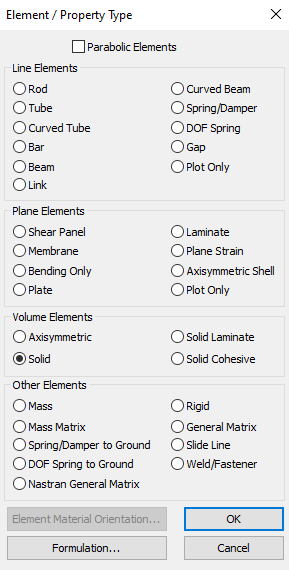 |
| Рис. 27. Выбор типа исследуемого объекта |
Теперь можно создать конечно-элементную модель исследуемого объекта: Mesh→Geometry→solidВыделяем лопатку и нажимаем ОК (рис.28).
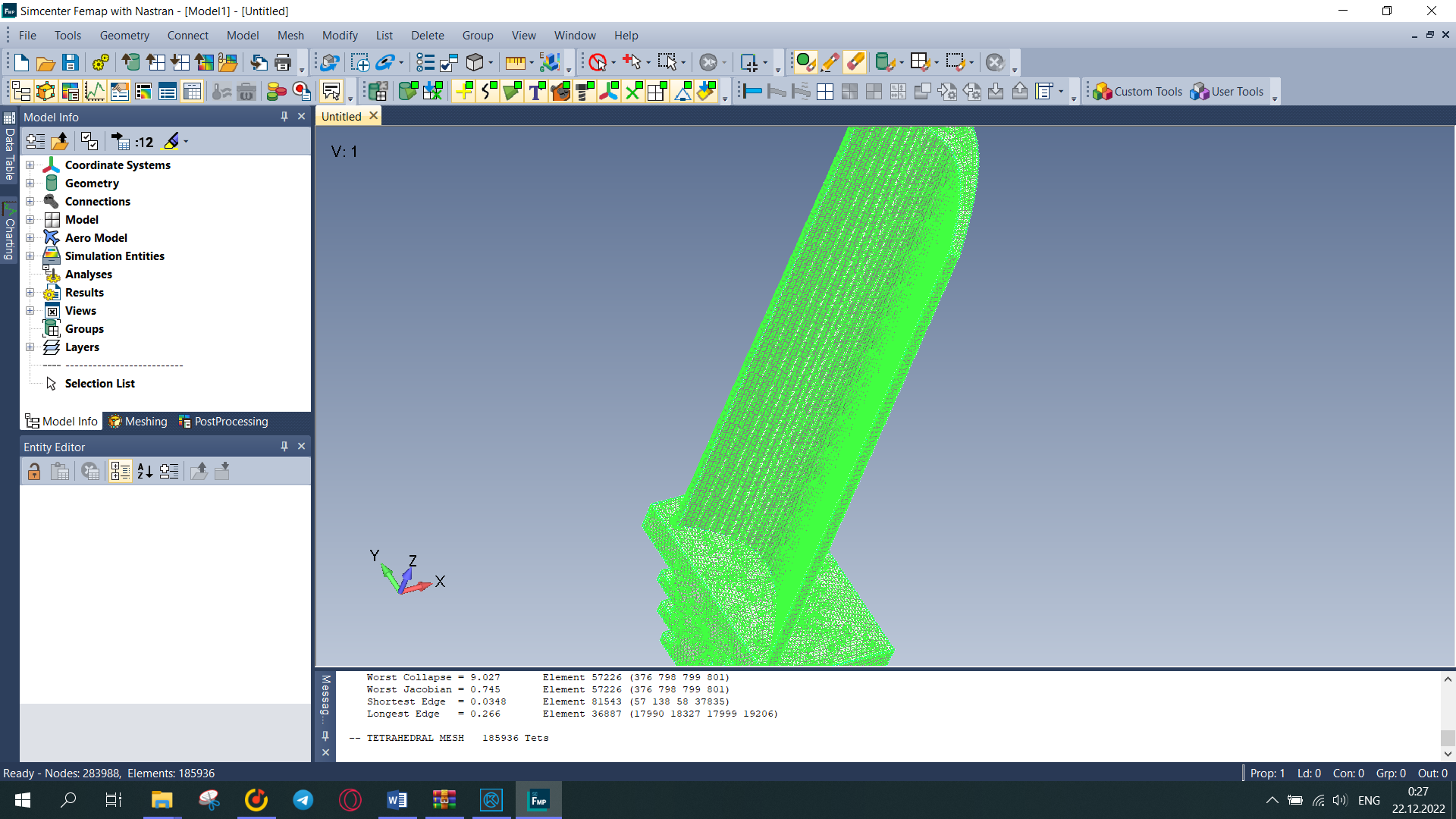 |
| Рис. 28. Модель лопатки, разбитая на конечные элементы |
Тепловой расчет. Зададим температуру на стенках: Model – Load – OnSurface. В первом появившемся окне даём название группе нагрузок, нажимаем ОК. Выделяем грань, которая считается внешней стороной восприятия температуры.
В левой части открывшегося окна (рис. 29) выбираем Temperature, в одноимённом поле вводим значение –600.
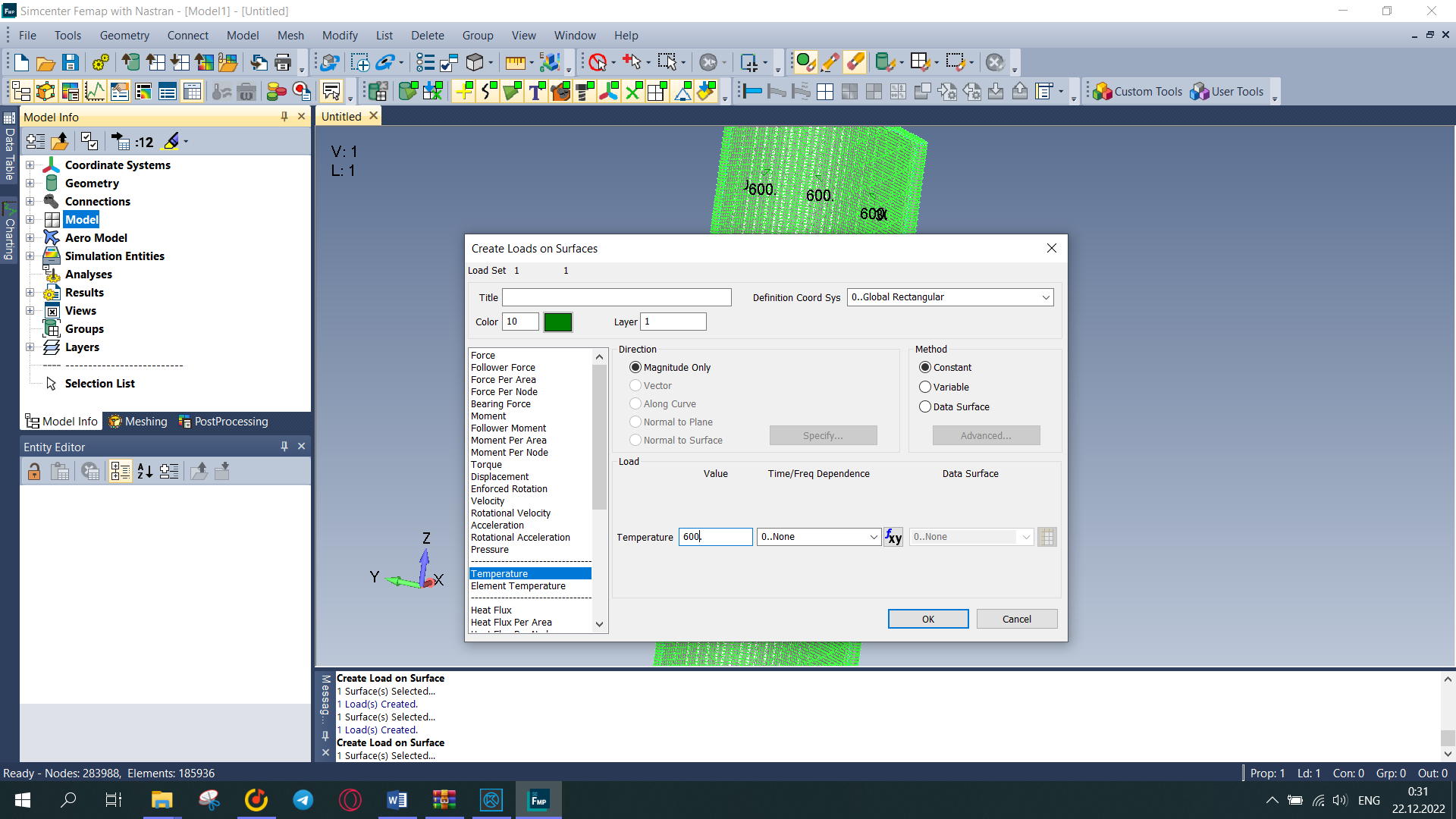 |
| Рис. 29. Указание температуры внешней части стены |
Аналогично задаём температуру за лопаткой, выбрав в качестве более нагретой площадки противоположную грань. Теперь объект подвергается воздействию двух различных температур (рис.30).
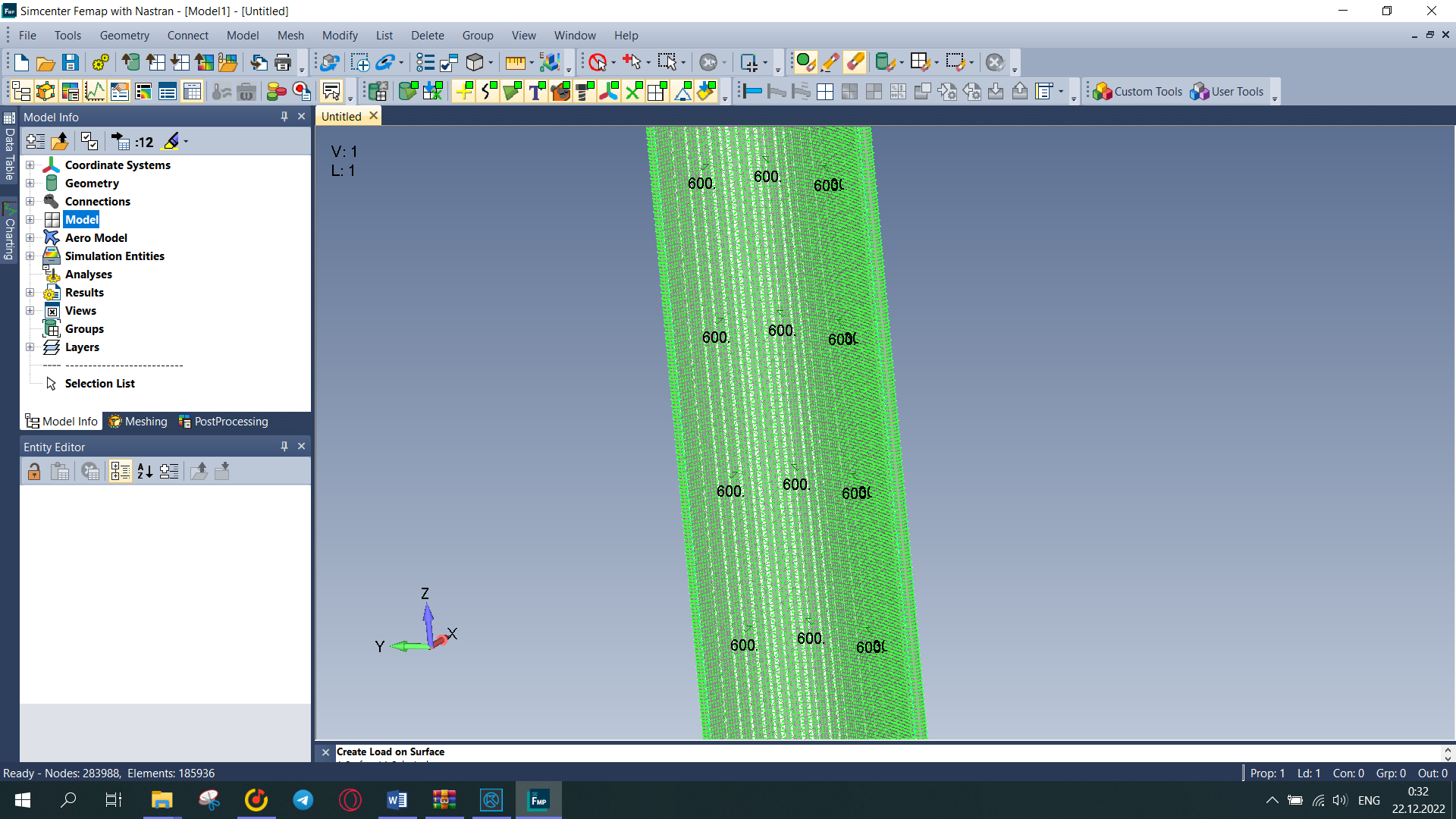 |
| Рис. 30. Приложение температур |
Теперь модель готова к проведению первого анализа, позволяющего определить температуру во всех точках объекта.
Переходим: Model – Analysis. В открывшемся окне (рис. 10) в поле AnalysisType выбираем Steady-StateHeatTransfer (стационарная теплопередача). Нажимаем ОК. В открывшемся окне нажимаем