Файл: Идентификация зоны охлаждения керамического кирпича в туннельной печи как объекта управления.docx
Добавлен: 23.11.2023
Просмотров: 48
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 | МИНОБРНАУКИ РОССИИ федеральное государственное бюджетное образовательное учреждение высшего образования «Самарский государственный технический университет» (ФГБОУ ВО «СамГТУ») |
Факультет: строительно-технологический
Кафедра «Механизация, автоматизация и энергоснабжение строительства»
КУРСОВАЯ РАБОТА
по дисциплине: Идентификация объектов управления
тема: Идентификация зоны охлаждения керамического кирпича в туннельной печи как объекта управления
| | | Выполнил(а): Студент 4 курса группы М-94 ______________ / Таджибоев А.А. / Принял: к.т.н., доцент кафедры МАЭС ______________ / Назаров М.А. / «___» _____________ 2022 г. |
Самара 2023
| | МИНОБРНАУКИ РОССИИ федеральное государственное бюджетное образовательное учреждение высшего образования «Самарский государственный технический университет» (ФГБОУ ВО «СамГТУ») |
Факультет: строительно-технологический
Кафедра «Механизация, автоматизация и энергоснабжение строительства»
| | | УТВЕРЖДАЮ Зав. кафедрой МАЭС __________ / ____________/ |
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
по дисциплине: Идентификация объектов управления
студенту Таджибоев Акрам Акмалжонович
Ф.И.О.
1. Тема: Идентификация зоны охлаждения керамического кирпича в туннельной печи как объекта управления.
2. Срок сдачи студентом законченной работы «___» ____________ 2022 г.
3. Перечень вопросов, подлежащих разработке:
3.1. Введение
3.2. Конструкция и принцип работы строительной машины
3.3. Функциональная схема системы автоматического управления строительной машиной
3.4. Определение объекта управления. Описание физических процессов, протекающих в нем.
3.5. Определение выходных координат объекта управления, управляющих и возмущающих воздействий. Диапазон их изменения с учетом ограничений со стороны технологии.
3.6. Принятые допущения. Разработка расчетной модели объекта управления.
3.7. Математическое описание строительной машины как объекта управления.
3.8. Структурная схема математической модели объекта управления. Линейные и нелинейные звенья структуры.
3.9. Заключение.
3.10. Библиографический список.
4. Перечень графического материала:
4.1. 1 лист формата А1:
а) обобщенная схема технологической линии, в состав которой входит промышленная установка или внешний вид строительной машины / установки / комплекса;
б) функциональная схема САУ;
в) расчетная модель объекта управления;
г) математическое описание объекта управления (в оригиналах и в изображениях по Лапласу);
д) структурная схема математической модели объекта управления.
6. Руководитель курсовой работы _____________ / Назаров М.А. /
Подпись Ф.И.О.
Задание выдано «___» ____________ 2022 г.
Задание принял к исполнению
Студент 4 курса группы М-94 ________________ / Таджибоев А.А./
Подпись Ф.И.О.
Срок выполнения и сдачи отчета «___» ____________ 2022 г.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ 5
1 КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ БАШЕННОГО КРАНА 6
2 ФУНКЦИОНАЛЬНАЯ СХЕМА СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 8
3 ОПРЕДЕЛЕНИЕ ОБЪЕКТА УПРАВЛЕНИЯ. ОПИСАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ, ПРОТЕКАЮЩИХ В НЕМ. ОПРЕДЕЛЕНИЕ ВЫХОДНЫХ КООРДИНАТ ОБЪЕКТА УПРАВЛЕНИЯ, УПРАВЛЯЮЩИХ И ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ 9
4 ПРИНЯТЫЕ ДОПУЩЕНИЯ. РАЗРАБОТКА РАСЧЕТНОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ 11
5 МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЗАВИСИМОСТЕЙ, ОПИСЫВАЮЩИХ ДИНАМИКУ МЕХАНИЗМА ПРЕДВИЖЕНИЯ ПРОТИВОВЕСА БАШЕННОГО КРАНА. 13
6 СТРУКТУРНАЯ СХЕМА ПРИВОДНОГО МЕХАНИЗМА КАК ОБЪЕКТА УПРАВЛЕНИЯ. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ ЗВЕНЬЯ СТРУКТУРЫ. 16
ЗАКЛЮЧЕНИЕ 17
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 18
ВВЕДЕНИЕ
Крановое электрооборудование является одним из основных средств комплексной механизации всех отраслей народного хозяйства. Подавляющее большинство грузоподъемных машин изготовляемых отечественной промышленностью, имеет привод основных рабочих механизмов, и поэтому действия этих машин в значительной степени зависит от качественных показателей используемого кранового оборудования. Перемещение грузов, связанное с грузоподъемными операциями, во всех отраслях народного хозяйства, на транспорте и в строительстве осуществляется разнообразными грузоподъемными машинами. Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов кранового исполнения. В настоящее время крановое электрооборудование имеет в своём составе серии крановых электродвигателей переменного и постоянного тока, серии силовых и магнитных контроллеров, командо- контроллеров, кнопочных постов, конечных выключателей, тормозных электромагнитов и электрогидравлических толкателей, пуско- тормозных резисторов и ряд других аппаратов, комплектующих разные крановые электроприводы.
В крановом электроприводе начали довольно широко применять различные системы тиристорного регулирования и дистанционного управления по радио каналу или одному проводу. Сущность автоматизации состоит в том, что производственные процессы, в том числе операции основного технологического процесса производства и связанные с ними погрузочно-разгрузочных, транспортных и складских (ПРТС) работы выполняются без участия человека (или с минимальным участием человека — в зависимости от степени автоматизации операций) автоматическими машинами и механизмами. В промышленности автоматизируются основные технологические процессы производства продукции и связанные с ними ПРТС работы, как часть комплексной технологии производства. В торговле и на транспорте автоматизируются перегрузочные, комплектовочные, сортировочные операции, транспортировка и складирование грузов, формирование транспортных пакетов и т.д.
1 КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ БАШЕННОГО КРАНА
Башенный кран - это подъемный механизм, используемый для перемещения тяжестей в вертикальном и горизонтальном направлениях на строительных площадках или в портах. Он состоит из мачты (башни) и подъемной стрелы, которая может вращаться вокруг мачты. Верхняя часть стрелы (грузозахватное устройство) служит для подъема и перемещения грузов.
Принцип работы башенного крана основывается на использовании электрических или гидравлических механизмов для подъема и перемещения грузов. Для подъема груза используется трос, который пропускается через блок и крепится к грузу. Электрический или гидравлический двигатель поднимает груз, перемещая его вверх и вниз.
Башенные краны обычно устанавливают на месте на некоторое время, но иногда их можно перемещать по площадке на специальных колесах или рельсах. Они имеют большую грузоподъемность и могут поднимать грузы на значительную высоту.
Управление башенным краном осуществляется оператором, который с помощью пульта управления перемещает стрелу и груз. Также управление может осуществляться с помощью специальных программных комплексов, которые позволяют автоматизировать процесс перемещения груза и повышают безопасность работы крана.
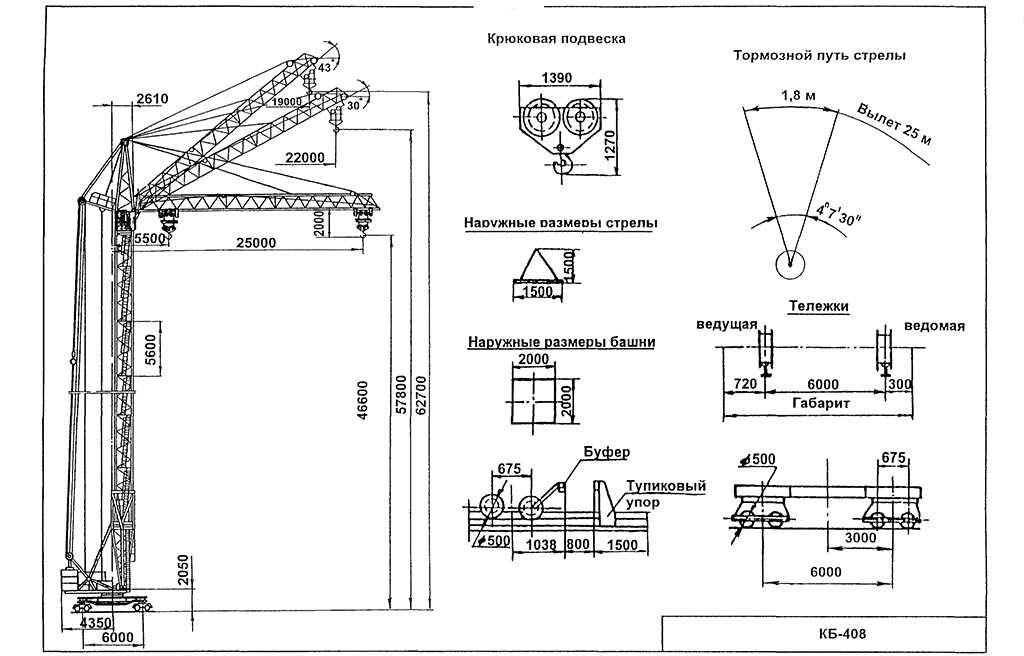
Рисунок 1 – Башенный кран
2 ФУНКЦИОНАЛЬНАЯ СХЕМА СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В данной работе рассмотрен тележка противовеса, с автоматизированным механизмом передвижения.
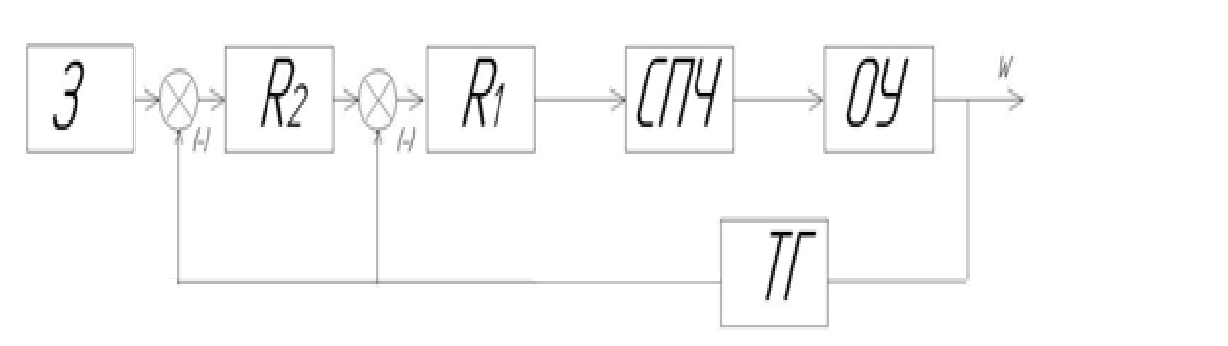
Рисунок 2 – Структурная схема механизма перемещения
В качестве устройства обеспечивающего высокую точность работы данного привода, предлагается использовать программируемый контроллер, который кроме возможности осуществления управления данными агрегатом, позволяет программно реализовать почти любой регулятор скорости [2]. Кроме программируемого контроллера в функциональную схему привода входит частотный преобразователь необходимый для управления выходной частотой вращения приводного асинхронного двигателя. Функциональная схема системы управления перемещением противовеса является замкнутой, и работает на разности сигнала от контроллера и датчика скорости. Датчик скорости осуществляет преобразование угловой или линейной скорости исполнительного органа в эквивалентный цифровой код, поступающий в управляющую часть. Тип датчика выбирают исходя из оценки достижимой погрешности позиционирования, импульсных датчиков, с помощью которых можно получить очень высокую точность позиционирования. Таким образом, весьма актуальным является синтез высокоточных систем, которым присуща простота технической реализации. Решение этой задачи основано на структурном синтезе следящих систем в виде многоконтурных систем с одной измеряемой координатой (МСОИК) [3].
3 ОПРЕДЕЛЕНИЕ ОБЪЕКТА УПРАВЛЕНИЯ. ОПИСАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ, ПРОТЕКАЮЩИХ В НЕМ. ОПРЕДЕЛЕНИЕ ВЫХОДНЫХ КООРДИНАТ ОБЪЕКТА УПРАВЛЕНИЯ, УПРАВЛЯЮЩИХ И ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ
За объектом управления принимаем технологический процесс механизма перемещения, обобщенную структуру которого изображена в виде блока на рис.3, имеющего два входа – векторы управляющих U и возмущающих H воздействий, так же один выход – вектор Y контролируемых параметров.
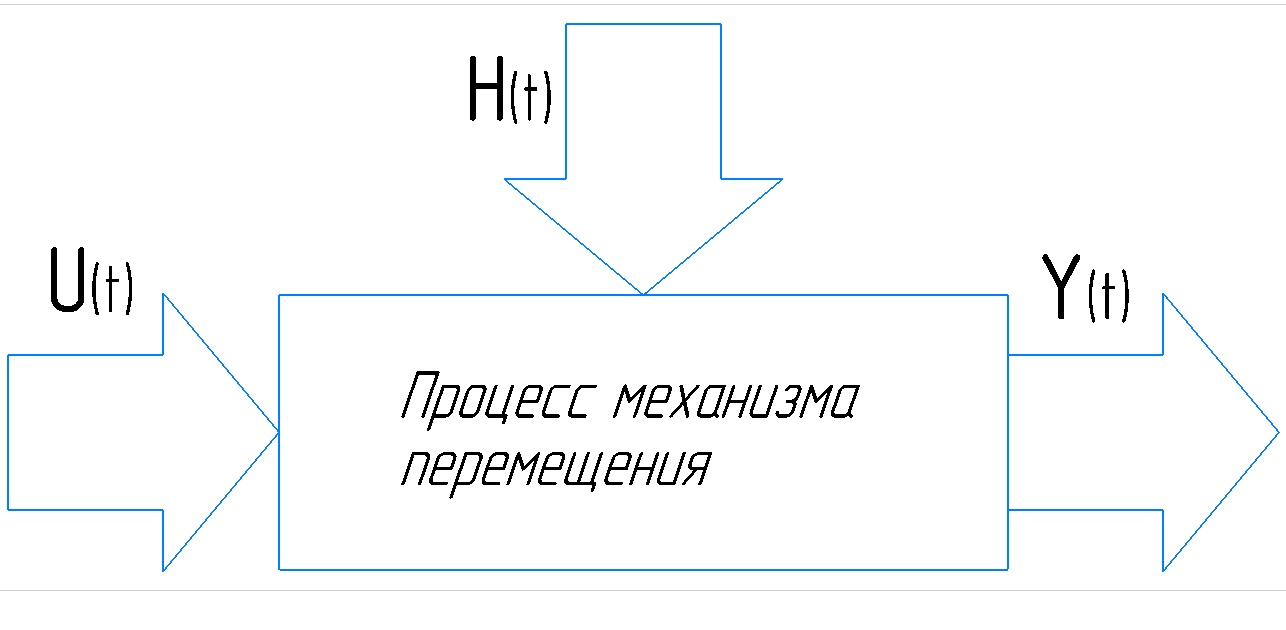
Рисунок 3 – Обобщенная структурна технологического процесса механизма перемещения башенного крана
Известно, что в общем случае в процессе перемещения башенного крана может характеризоваться следующими основными параметрами:
Длина базы (L) - это расстояние между передней и задней осью крана:
L = Lf + Lr
где Lf - длина передней оси, Lr - длина задней оси.
Ширина базы (W) - это расстояние между боковыми стенками крана:
W = Wf + Wr
где Wf - ширина передней оси, Wr - ширина задней оси.
Высота кабины управления (H) - это расстояние от земли до кабины управления:
H = Hc + Ht
где Hc - высота кабины управления, Ht - высота башни крана.
Максимальная скорость движения (V) - это максимальная скорость, которую может развить кран при перемещении:
V = Vmax * (P/Pmax)
где Vmax - максимальная скорость крана, P - текущая нагрузка крана, Pmax - максимальная грузоподъемность крана.
Грузоподъемность (W) - это максимальный вес, который может поднять кран:
W = C * L * W * H
где C - коэффициент, зависящий от конструкции крана.
Радиус поворота (R) - это расстояние, которое кран может пройти при повороте на 360 градусов:
R = L / tan(α)
где α - угол между передними и задними осями крана.
Угол поворота (θ) - это угол, на который может повернуться кран относительно оси вращения:
θ = atan(L / 2R)
Габаритные размеры (Hg, Lg, Wg) - это размеры крана в различных положениях и ориентациях:
Hg - высота крана в сложенном состоянии; Lg - длина крана в сложенном состоянии; Wg - ширина крана в сложенном состоянии.
Масса крана (M) - это масса ходовой части крана без груза:
M = Mc + Mt
где Mc - масса кабины управления и механизмов управления, Mt - масса башни крана.