Файл: Идентификация зоны охлаждения керамического кирпича в туннельной печи как объекта управления.docx
Добавлен: 23.11.2023
Просмотров: 53
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Силы, действующие на кран (F) - это силы, воздействующие на кран во время перемещения, включая силы сопротивления воздуха и трения, а также вес груза, если он поднят:
F = Fa + Fr + Fg
где Fa - сила сопротивления воздуха, Fr - сила трения, Fg - вес груза.
4 ПРИНЯТЫЕ ДОПУЩЕНИЯ. РАЗРАБОТКА РАСЧЕТНОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ
При разработке математического описания объекта управления примем некоторые допущения.
1) Объект управления. Его входные и выходные координаты.
2) Разработка расчетной схемы, составление математических зависимостей, описывающих динамику механизма передвижения ходовой части башенного крана.
3) Учитываем предельно допустимы скорость ветра при эксплуатации башенного крана
4) Принимаем, что скорость перемещение ходовой части постоянна по всей длине установленного рейльса.
Исходя из анализа перемещение башенного крана, конструкции и принцип работы башенного крана составим расчетную модель процесса перемещения (рис. 4).
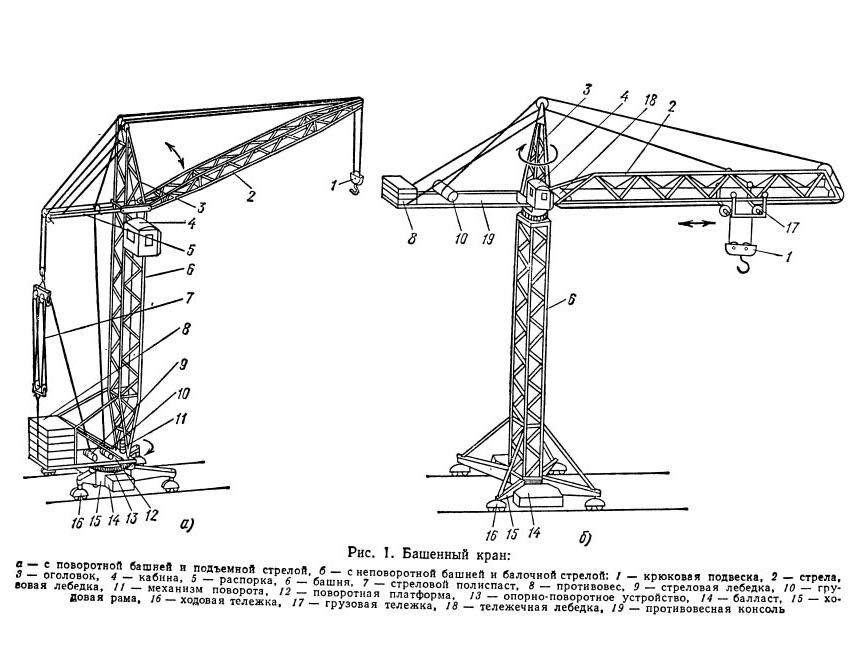
Рисунок 4 – расчетная модель процесса перемещения
5 МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЗАВИСИМОСТЕЙ, ОПИСЫВАЮЩИХ ДИНАМИКУ МЕХАНИЗМА ПРЕДВИЖЕНИЯ ПРОТИВОВЕСА БАШЕННОГО КРАНА.
В разрабатываемой модели входят приводные механизмы, включающие в себя асинхронный двигатель 1, редуктор 2 и приводные колеса 3.


2 1


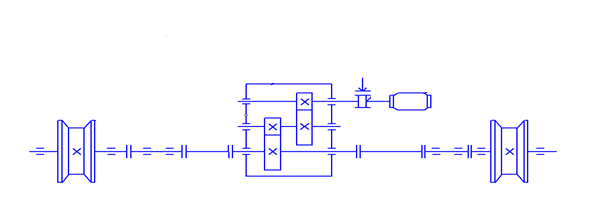
3
Рис. 3 Кинематическая схема механизма перемещения
В соответствии с кинематической схемой (рис.3) привода разработаем его расчетную схему. Она включает в себя момент инерции Jд ротора исполнительного двигателя, передаточное число iр редуктора, радиус Rк ходового колеса, момент Mд на валу, угол φ1 поворота входного вала редуктора, угол φ2 поворота выходного вала редуктора, силу F, развиваемую приводом и направленную вдоль оси рельса, перемещаемая масса m, нелинейное звено НЗ, описывающее люфт редуктора. В нелинейном звене b –величина зазора. Для упрощения математического моделирования механизма допустим, что упруго-диссипативным свойствами обладает только самый податливый элемент (соединительная муфта), соединяющий редуктор с ходовым колесом.
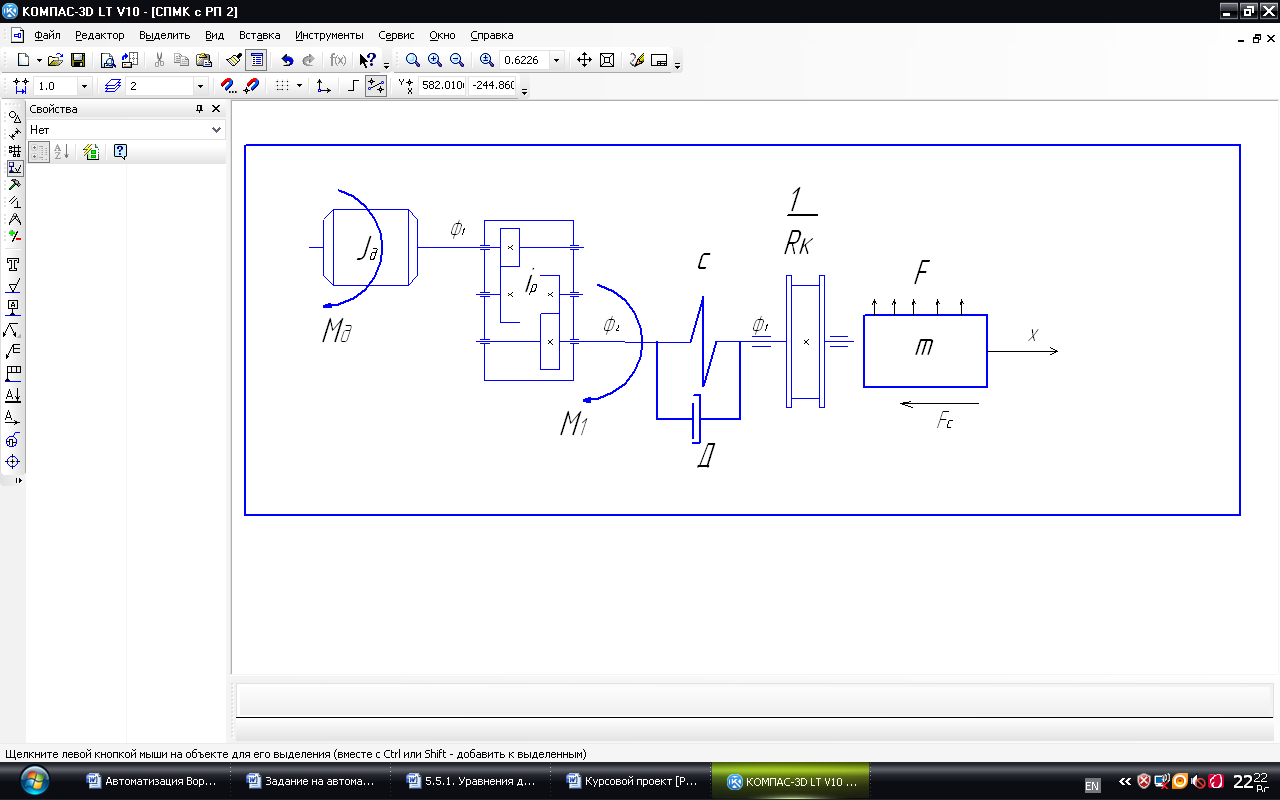
Рис. 4. Расчетная схема механизма перемещения
В соответствии с расчетной схемой движение исполнительного механизма можно описать системой уравнений:
 (1)
(1)Где, JД – момент инерции ротора исполнительного двигателя;
iР – передаточное число редуктора;
RK – радиус ходового колеса;
m – перемещаемая масса;
φ1 – угол поворота вала двигателя;
φ2 – угол поворота выходного вала редуктора;
φ – угол поворота соединительного вала;
х – линейное перемещение груза;
МД – момент, развиваемый валом двигателя;
М1 – момент редуктора;
FС - сила трения;
F – линейная сила, развиваемая механизмом.
Представим систему уравнений (1) в оперативной форме, считая, что начальные условия нулевые:
 (2)
(2)Дополним систему уравнений (2) уравнениями движения асинхронного двигателя при частотном регулировании:
 (3)
(3) Где T1, T2, T32 – постоянные времени статорной, роторной цепи т цепи намагничивания, L1, L2’, L0 – индуктивность цепи статора, ротора и цепи намагничивания, r1, r2 – активные противления статора и ротора,
 – коэффициент рассеивания, ω- угловая частота питающего напряжения, J- эквивалентный момент инерции, Mc- момент статической нагрузки, р - число пар полюсов, ωдв- угловая частота вращения ротора.
– коэффициент рассеивания, ω- угловая частота питающего напряжения, J- эквивалентный момент инерции, Mc- момент статической нагрузки, р - число пар полюсов, ωдв- угловая частота вращения ротора.6 СТРУКТУРНАЯ СХЕМА ПРИВОДНОГО МЕХАНИЗМА КАК ОБЪЕКТА УПРАВЛЕНИЯ. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ ЗВЕНЬЯ СТРУКТУРЫ.
Структурно полученную математическую модель приводного механизма как объекта управления с распределенными параметрами можно представить в виде структурной схемы, приведенной на рис. 5.
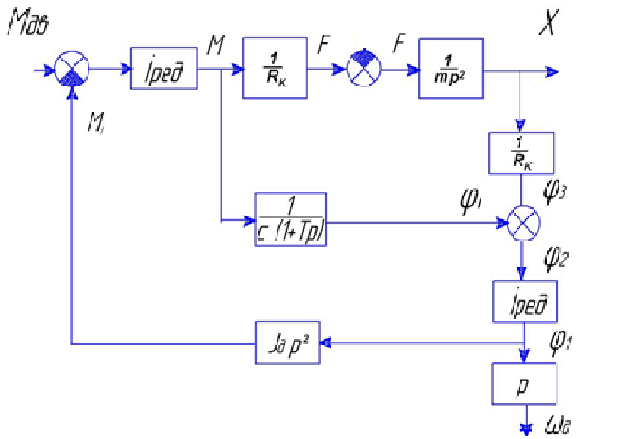
Структурная схема ОУ.
В приведенной структурной схеме (рис.5) можно выделить множительные блоки, как нелинейные звенья. Передаточные функции
 в (21) являются трансцендентными, которые для дальнейшего использования при синтезе САУ необходимо аппроксимировать наборами типовых динамических звеньев.
в (21) являются трансцендентными, которые для дальнейшего использования при синтезе САУ необходимо аппроксимировать наборами типовых динамических звеньев.ЗАКЛЮЧЕНИЕ
В курсовой работе мы рассматривали механизм перемещение ходовой тележки башенного крана, конструкцию и принцип работы, разработали функциональную схему, определили объекта управления, рассмотрели математическую модель и описание и разработали структурную схему и с этим закончили курсовую работу!
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Назаров М.А. Идентификация объектов управления: уч. пособие – Самара: Самар. гос. техн. ун-т, 2020. – 180 с.
2. Гарднер М.Ф. Бэрнс Дж.Л. Переходные процессы в линейных системах с сосредоточенными постоянными. - 3-е изд., испр. - М.: Физматгиз, 1961. - 551 с.
3. Дейч А.М. Методы идентификации динамических объектов. - М.: Энергия, 1979. - 240с.
4. Льюнг Л. Идентификация систем. Теория для пользователя. - М.: Наука, 1991. - 432 с.
5. Повзнер Л.Д. Теория систем управления: Учебное пособие для вузов. - М.: Изд. МГГУ, 2002. - 472 с.
6. Райбман Н.С. Что такое идентификация? - М.: Наука, 1970. - 118 с.
7. Эйкхофф П. Основы идентификации систем управления. - М.: Мир, 1975. - 686 с.
8. Цыпкин Я.З. Основы информационной теории идентификации. - М.: Наука, 1984. - 320 с.