Файл: Разработка лабораторного стенда по программированию микроконтроллера stm.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 23.11.2023
Просмотров: 237
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.БАЗОВЫЕ ПОНЯТИЯ О МИКРОКОНТРОЛЛЕРАХ
1.3.Основные сведения о широтно – импульсной модуляции
2.ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
2.1.Описание среды программирования
2.2.Разработка комплекса лабораторных работ
2.3.Указания по выполнению лабораторной работы 1
2.4. Характеристика лабораторной работы 2
2.5. Характеристика лабораторной работы 3
2.6. Характеристика лабораторной работы 4
2.7. Характеристика лабораторной работы 5
2.4. Характеристика лабораторной работы 2
Тема «Программирование управляющих сигналов транзисторной стойки с генерацией «мертвого» времени (DeadTime)»
Цель: программирование ШИМ – сигналов с настройкой «мертвого времени». Описание лабораторной работы:
В процессе выполнения данной лабораторной работы, обучающиеся научатся владеть технологией разработки программного обеспечения для микроконтроллеров STM32. Познакомятся c методом генерации мертвого времени. Также вживую увидят результаты проделанной работы, что позволит наглядно убедиться в правильности выполнения задания. Краткие теоретические сведения:
«Мертвое» время (DeadTime) – задержка по времени положительных фронтов управляющих сигналов для исключения аварийных ситуаций в стойках. Стойка (рисунок 37) — это основной элемент силовой схемы, состоит из двух последовательно соединённых транзисторов и обратных диодов, соединённых параллельно с ними.
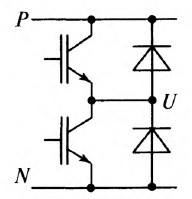
Рисунок 37 – Один из вариантов исполнения стойки
Управление стойкой происходит с помощью ШИМ, обычно для стойки с двумя транзисторами скважность задается только для верхнего ключа, а нижний ключ работает в комплементарном (со–зависимом) режиме (рисунок 38), то есть когда верхний ключ включен, то нижний выключен и наоборот, кода нижний ключ включен, верхний должен быть выключен. Такой комплементарный способ управления применяется в большинстве преобразователей. Микроконтроллер STM32F103C8T6 имеет в своем наборе таймер TIM1, с помощью которого можно назначить комплементарные выводы для генерации ШИМ – сигнала, то есть программисту необходимо задать скважность ШИМ только для верхнего ключа, а на соответствующем выводе микроконтроллера аппаратно сформируется комплементарный сигнал для нижнего ключа.
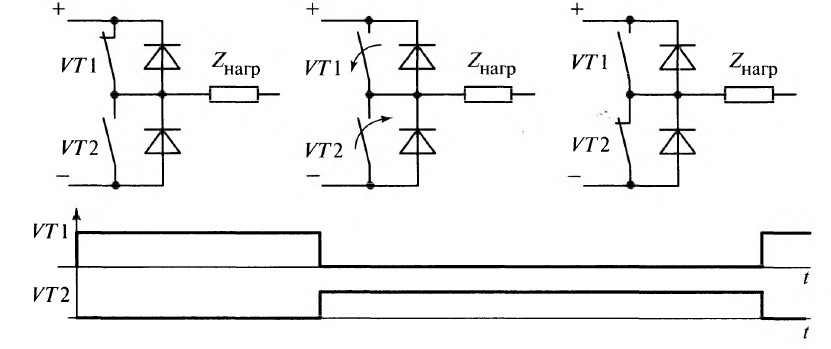
Рисунок 38 – Комплементарное управление транзисторами в стойке
Особое внимание следует обратить на момент выключения верхнего транзистора и включения нижнего. На практике время срабатывания транзисторов отлично от нуля и возможна ситуация, когда один транзистор уже успел включиться, а другой еще не успел выключится это приводит к короткому замыканию между положительным и отрицательным контактами стойки. Ток, который возникает в таком аварийном режиме называют «сквозным». Для предотвращения таких ситуаций используют генерацию «мертвого» времени, то есть происходит смещение фронтов сигналов (рисунок 39) и возникают паузы в управлении, которые гарантируют безопасное включение и отключение транзисторов в стойке.[1]
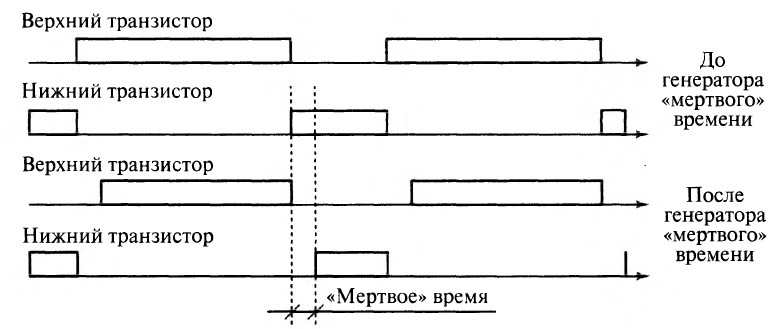
Рисунок 39 – Генерация «мертвого» времени
Содержание и порядок выполнения работы:
Представлено в ПРИЛОЖЕНИИ А.
Задание: в соответствии с назначенным преподавателем вариантом необходимо изменить значение поля TIM_DeadTime структуры BDTR на значение из таблицы 6, скомпилировать полученный проект, загрузить рабочую программу в микроконтроллер и продемонстрировать результат.
Таблица 6 – Значения для поля TIM_DeadTime
| Вариант | 1 | 2 | 3 | 4 |
| Значение | 20 | 30 | 40 | 50 |
Содержание отчёта:
-
Название и цель работы. -
Код с измененными параметрами. -
Компоновка элементов лабораторной установки, название входящих в нее элементов, в том числе основных узлов микроконтроллера. -
Выводы о проделанной работе. -
Подготовиться к устному опросу по лабораторной работе. Вопросы для самоконтроля:
-
Что такое мертвое время (DeadTime)? -
Что такое сквозной ток? -
Поясните как происходит управление стойкой при помощи ШИМ. -
Поясните способ комплементарного управления стойкой. -
Укажите в каком поле структуры BDTR, указывается значение мертвого времени?
2.5. Характеристика лабораторной работы 3
Тема «Изменение скважности ШИМ – сигнала с помощью кнопки
(button)»
Цель: написать программу для изменения скважности ШИМ – сигнала с помощью кнопки. Описание лабораторной работы:
В процессе выполнения данной лабораторной работы, обучающиеся научатся владеть технологией разработки программного обеспечения для микроконтроллеров STM32. Познакомятся с особенностями инициализации такого периферийного устройства как порт ввода – вывода. Научатся использовать выводы микроконтроллера для снятия входных данных, в данном случае с кнопки. Знакомство с портами ввода – вывода наиболее важная часть в процессе изучения микроконтроллеров, так как именно они используется для взаимодействия контроллера с внешним миром. После проделанной работы, обучающиеся будут лучше ориентироваться в вопросах о разработках систем управления для «умного» дома, электропривода и так далее.
Краткие теоретические сведения:
Порты ввода – вывода (GPIO) это основной элемент любого микроконтроллера, они используются для «общения» микроконтроллера с внешним миром. Устройство портов ввода – вывода представлено на рисунке 40.
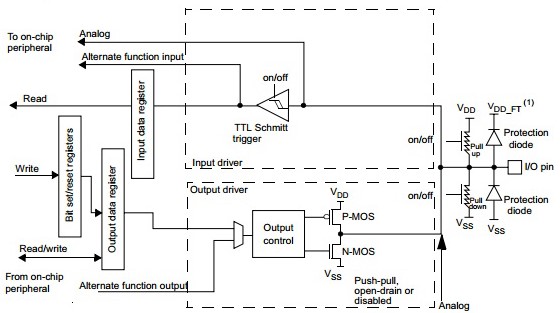
Рисунок 40 –Устройство портов ввода – вывода (GPIO)
Как видно из рисунка 40, выводы микроконтроллера можно сконфигурировать как на вход, так и на выход:
-
Входной драйвер (input driver) – позволяет сконфигурировать порт микроконтроллера как вход (аналоговый вход, альтернативная функция), с возможностью чтения входных данных, включает в себя:
а) триггер Шмитта (TTL Schmitt trigger);
б) стягивающий резистор (pull – down) –подключен к выводу G (земля), позволяет получить на выводе низкое напряжение (логический ноль);
в) подтягивающий резистор (pull – up) – подключен к питанию микро-
контроллера, позволяет получить на выводе высокое напряжение (логическую единицу);
г) защитный диод (protection diode) – защищает микроконтроллер от перенапряжения.
-
Выходной драйвер (output driver) – позволяет сконфигурировать порт микроконтроллера как выход, с возможностью чтения и записи выходных данных, также возможна конфигурация порта в виде выхода альтернативной функции (например, для генерации ШИМ – сигналов). Выходной драйвер включает в себя:
а) управление выходом (output control);
б) транзисторы (P – MOS и N – MOS), используются для определения
на выходе микроконтроллере высокого напряжения (логической единицы), либо низкого напряжения (логического нуля);
в) защитный диод (protection diode) – защищает микроконтроллер от перенапряжения.
В данной лабораторной работе необходимо подключать кнопку. Кнопка – это устройство при нажатии, на которое происходит замыкание контактов. Для подключения кнопки к микроконтроллеру необходимо сконфигурировать порт микроконтроллера как вход и включить чтение входных данных.
Содержание и порядок выполнения работы:
Представлено в ПРИЛОЖЕНИИ Б.
Задание: в соответствии с назначенным преподавателем вариантом, необходимо изменить значение макроса TIM_PULSE_BUTTON_ONна значение из таблицы 7, скомпилировать проект, загрузить рабочую программу в микроконтроллер, результат продемонстрировать. Таблица 7 – Значения для макроса
| Вариант | 1 | 2 | 3 | 4 |
| Значения | 1600 | 1700 | 1800 | 2000 |
Содержание отчёта:
-
Название и цель работы. -
Код с измененными параметрами. -
Компоновка элементов лабораторной установки, название входящих в нее элементов, в том числе основных узлов микроконтроллера. -
Выводы о проделанной работе. -
Подготовиться к устному опросу по лабораторной работе.
Вопросы для самоконтроля:
-
Что такое кнопка? -
Напишите фрагмент кода считывания данных с вывода микроконтроллера. -
Для чего используется подтягивающий к питанию резистор? -
Напишите фрагмент кода для инициализации вывода микроконтроллера как «входа».