ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 62
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«МУРМАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электрооборудования судов
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА
по дисциплине
Моделирование судового электрооборудования
Тема:
«Моделирование электродвигателя постоянного тока»
Вариант№7
Выполнил: студент
ЭСЭО18з-688
Ковалев К. А.
«___»_______________2023 г.
__________________(подпись)
Проверил: преподаватель
Саватеев Д. А.
«___»_______________2023г.
__________________(подпись)
Мурманск
2023
| 1.Паспортные данные электродвигателя…………………………………………. | 3 |
| 2.Математическая модель двигателя постоянного тока с независимым возбуждением……………………………………………………………………..... | |
| 4 | |
| 3. Расчет параметров схемы замещения………………………………………….. | 5 |
| 4.Моделирование двигателя постоянного тока с использованием функционального блока библиотеки силовых устройств Simulink…………….. | |
| 9 | |
| 5.Моделирование пуска двигателя постоянного тока с пониженным напряжением на якорной обмотке………………………………………………… | |
| 14 | |
| 6. Использование данных, полученных при моделировании…………………… | 15 |
| 7. Список литературы……………………………………………………………… | 22 |
Содержание
-
Паспортные данные электродвигателя П52М.
Мощность: P = 8,8 кВт;
Напряжение: U = 220 В;
КПД: ???? = 0,825;
Номинальная скорость: n = 1500 об/мин;
Число пар полюсов: p = 4;
Сопротивление шутовой обмотки возбуждения:

= 150 Ом;
Число витков якорной обмотки:
 = 248;
= 248; Сопротивление якорной обмотки:
 = 0,19 Ом;
= 0,19 Ом;Сопротивление обмотки добавочных полюсов:
 = 0,084 Ом;
= 0,084 Ом;Число витков шунтовой обмотки возбуждения:
 = 1500;
= 1500; Коэффициент рассеяния: sigma=1.12; .
2 Математическая модель двигателя постоянного тока с независимым возбуждением.
В основе моделирования двигателя постоянного тока с независимым возбуждением лежит решение системы дифференциальных уравнений, составленных по второму правилу Кирхгофа для двух цепей: цепи возбуждения и якорной цепи (рис. 1):
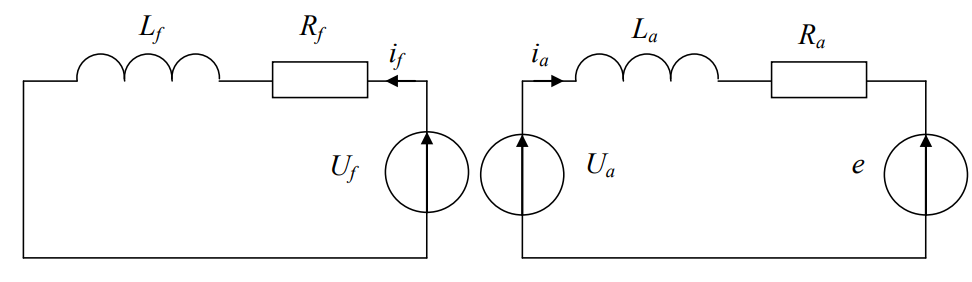
Рис.1.Схема замещения электрических цепей двигателя постоянного тока с независимым возбуждением.
где
 e– функции времени.
e– функции времени.ЭДС вращения:

где
 - взаимная индуктивность якорной обмотки и обмотки возбуждения.
- взаимная индуктивность якорной обмотки и обмотки возбуждения.Угловая скорость является функцией времени и входит в уравнение, устанавливающее связь между механическими величинами:
Электромагнитный момент двигателя:

Таким образом, учитывая взаимное влияние механических и электромагнитных процессов, в систему необходимо включить три уравнения:
Полученная система уравнений является математической моделью двигателя, и, чтобы привести модель в действие, необходимо решить систему. Следует понимать, что особенность исследовательской деятельности заключается в том, чтобы использовать модель в действии многократно, меняя различные параметры. Один из способов реализовать такую возможность – запрограммировать решение уравнений в том или ином виде. Далее будет рассмотрено несколько способов такой реализации, но на предварительном этапе необходимо определить параметры схемы замещения по паспортным данным электродвигателя.
3. Расчет параметров схемы замещения.
3.1. Расчетные соотношения. Индуктивность якорной цепи:
где
 - номинальное напряжение якорной обмотки, В;
- номинальное напряжение якорной обмотки, В;p– число пар полюсов;
 – номинальная угловая скорость ротора, рад/с;
– номинальная угловая скорость ротора, рад/с; номинальный ток якорной обмотки, А;
номинальный ток якорной обмотки, А;k = 0,6 для некомпенсированных двигателей.
Номинальная угловая скорость ротора рассчитывается по формуле:

где
 – номинальная частота вращения ротора, об/мин;
– номинальная частота вращения ротора, об/мин; Номинальный ток якоря является частью номинального тока электродвигателя:

где
 ток электродвигателя, А;
ток электродвигателя, А; номинальный шутовой обмотки возбуждения, А.
номинальный шутовой обмотки возбуждения, А.Номинальный ток электродвигателя:

где
 номинальная мощность, Вт;
номинальная мощность, Вт; номинальный коэффициент полезного действия (КПД).
номинальный коэффициент полезного действия (КПД).Номинальный ток шунтовой обмотки возбуждения:

где
 – сопротивление шунтовой обмотки возбуждения, Ом.
– сопротивление шунтовой обмотки возбуждения, Ом. Индуктивность шунтовой обмотки возбуждения:
где =1,121,25 – коэффициент рассеяния магнитоного потока главного полюса;
 – число витков шунтовой обмотки возбуждения;
– число витков шунтовой обмотки возбуждения; 
– номинальный магнитный поток на полюс, Вб.
Номинальный магнитный поток может быть выделен из произведения С
 :
:
где С – машинная постоянная, вычисляемая, в свою очередь, по формуле:

В формуле N – число активных проводников якорной обмотки, а – число пар параллельных ветвей якорной обмотки – каталожные значения. Если число активных проводников не задано, оно может быть вычислено как удвоенное количество витков якорной обмотки, через число секций и число витков секции – в зависимости от того, какие данные приведены в справочнике.
Произведение
 вычисляется на основе номинальных данных:
вычисляется на основе номинальных данных:
где
 - суммарное сопротивление якорной цепи, включающее в себя сопротивление якорной обмотки и сопротивление обмотки добавочных полюсов.
- суммарное сопротивление якорной цепи, включающее в себя сопротивление якорной обмотки и сопротивление обмотки добавочных полюсов.Взаимная индуктивность якорной обмотки и шунтовой обмотки возбуждения:

Коэффициент вязкого трения, определяющий момент холостого хода:
3.2. Автоматизация расчета параметров схемы замещения.
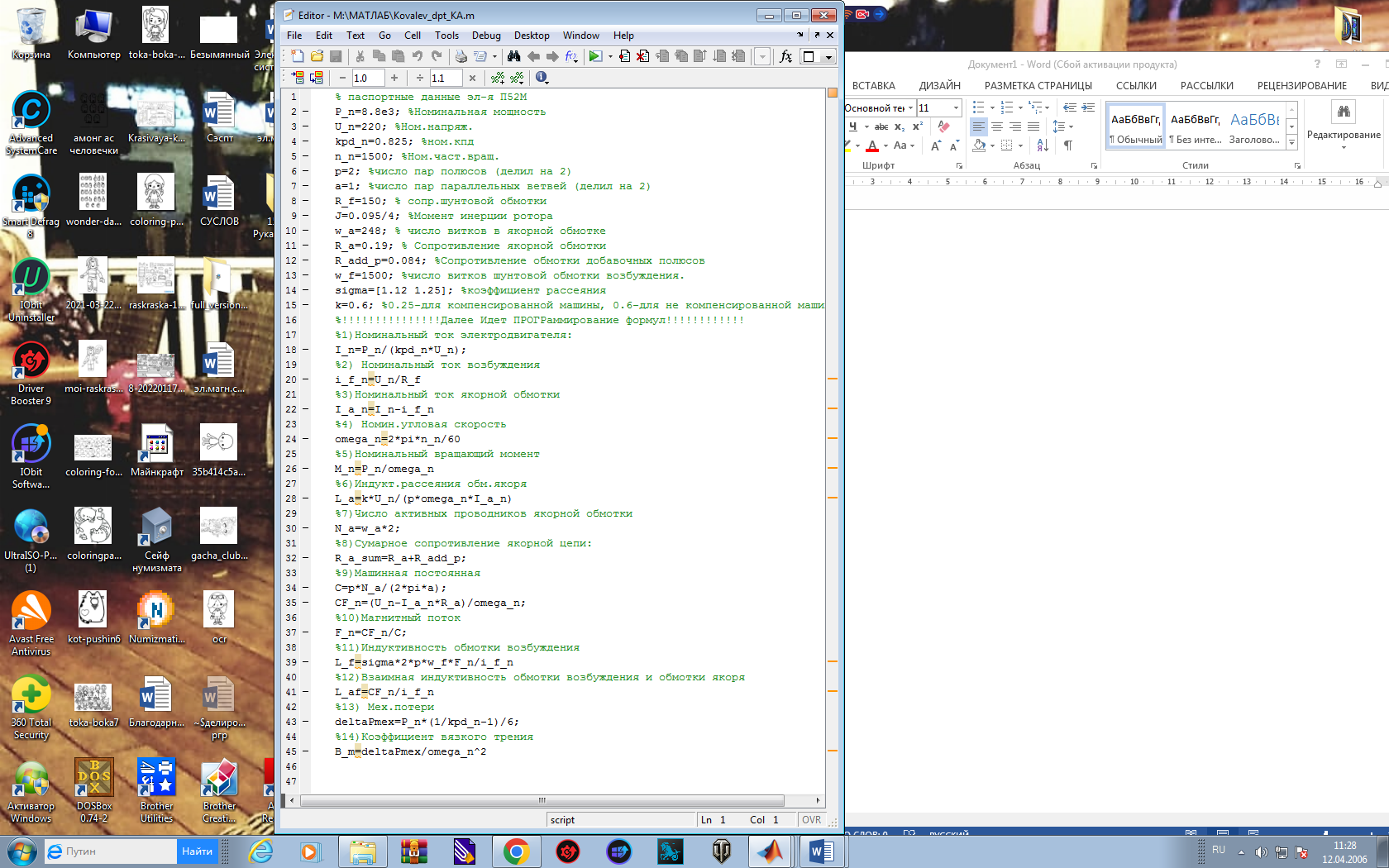
3.2.1. Автоматизация расчета с использованием М-функции.
М-функция представляет собой запрограммированные формулы написанных на языке программирования MATLAB, выполняемых последовательно, от первой до последней строки, при обращения пользователя к функции. Текст функции начинается со специального заголовка, обращение к функции может производиться из командной строки, М-сценария или другой функции, аргументы функции задаются при обращении к ней.
В работе требуется создать функцию, выполняющую расчет величин на основе паспортных и обмоточных данных электрической машины, ее написание следует начинать со строки вида:
function[L_a,L_f,L_af,B_m,M_n,i_f_n,I_a_n,omega_n]=dcm_parameters(P_n,U_n,n_n,kpd_n,p,a,J,R_a,R_add_p,R_f,w_a,w_f,sigma,k)
Слово function является специальным, о чем свидетельствует его синий цвет. После этого слова в квадратных скобках указываются величины, которые должны быть возвращены функцией при обращении к ней. Их принято называть выходными переменными функции. После знака "=" должно указываться название функции. В данном примере это название dcm_parameters, но может быть любым, подчиняющимся правилам обозначения переменных. За названием функции, в круглых скобках приводим входные аргументы функции – данные, на основании которых будет производиться расчет. Заданный заголовком порядок записи входных аргументов должен строго соблюдаться при обращении к функции. Запись заголовка функции в редакторе MATLAB должна быть выполнена в одной строке, без переноса. После заголовка должен располагаться основной программный код:
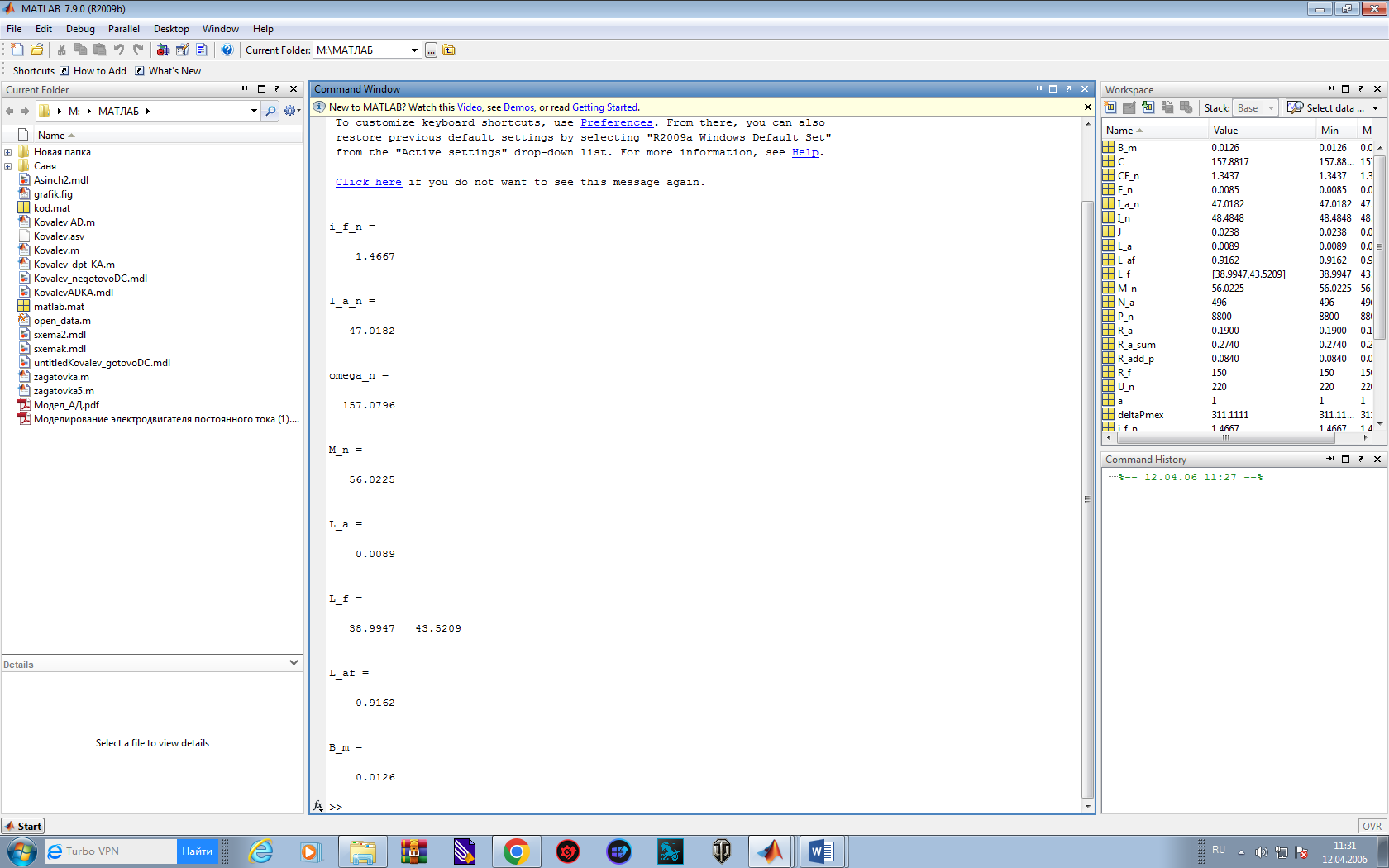
Результат выполнения функции будет выведен в командное окно:
4. Моделирование двигателя постоянного тока с использованием функционального блока библиотеки силовых устройств Simulink.
Simulink – это система имитационного блочного моделирования динамических систем, являющаяся подсистемой MATLAB. Средства моделирования Simulink основываются на программных средствах MATLAB, но позволяют обойтись без использования в явном виде языка MATLAB и создавать модели из стандартных блоков в графическом виде.
4. 1. Моделирование прямого пуска двигателя постоянного тока.
Для решения задач моделирования систем, составной частью которых является двигатель постоянного тока, целесообразно использование готового блока: SimPowerSystems – Machines – DC machine
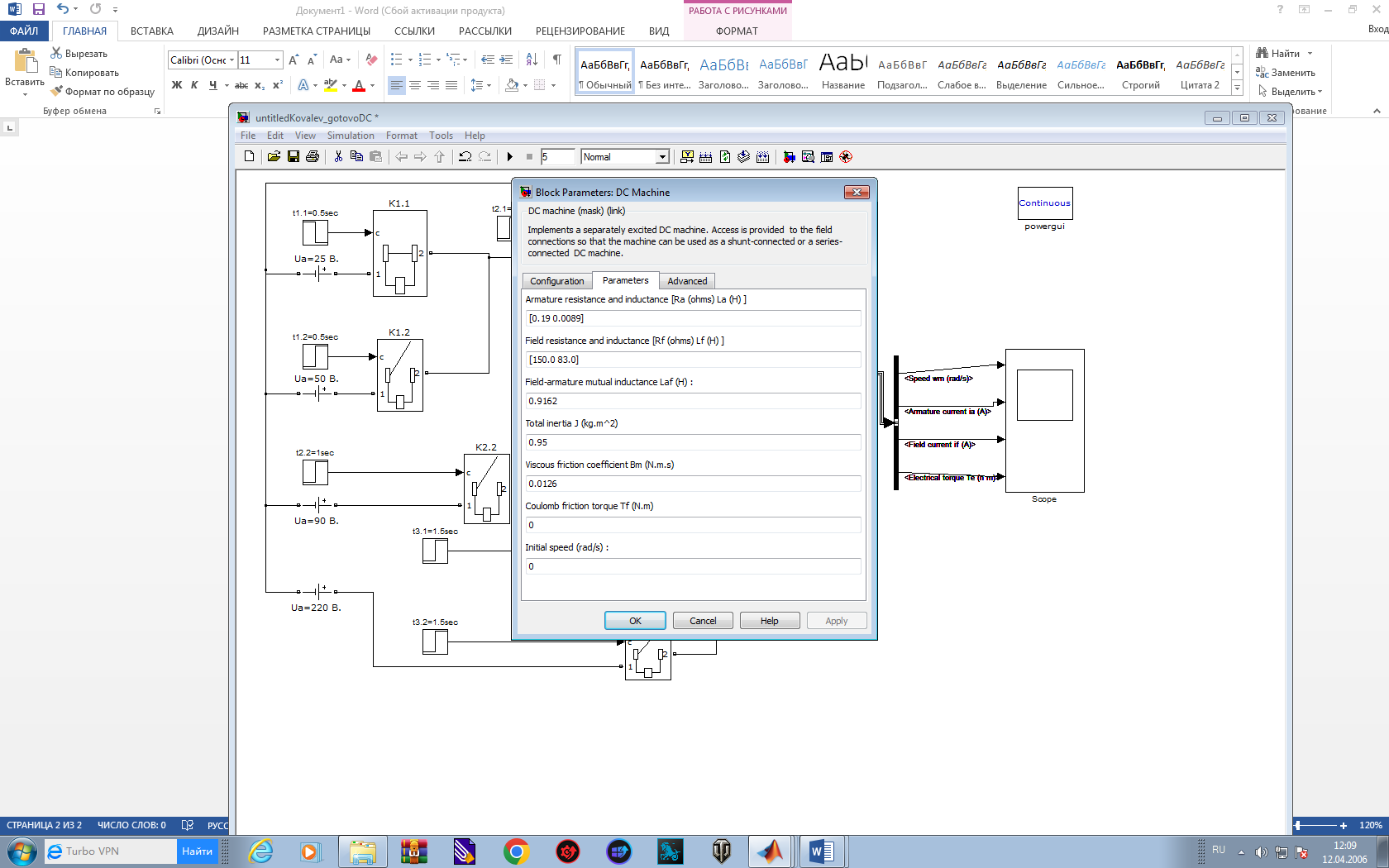
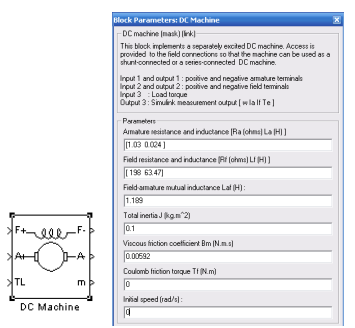
Рис.2. Функциональный блок DC machine и его окно параметров.
Помимо выводов обмоток электродвигателя, блок имеет вход TL и выход т. Вход TL блока предназначен для ввода момента сопротивления, выход m – для вывода величин, характеризующих работу двигателя. В окно