Файл: Введение Разработка математической модели исходной сау.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.01.2024
Просмотров: 90
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 Содержание
СодержаниеВведение……………………………………………………………………………..4
-
Разработка математической модели исходной САУ………………...………..5 -
Анализ качества исходной САУ....................................…...……………….......8 -
Синтез корректирующих устройств..................................................................11 -
Анализ качества скорректированной САУ...................…………...……….....13 -
Анализ точности САУ........................................................................................16 -
Расчет параметров корректирующих устройств.........…..…………………...18
Заключение ………………………………………………………………………...21
Список использованных источников……………………………………………..22
Приложение А
 Введение
Введение
Теория автоматического управления (ТАУ) изучает методы управления технологическими процессами, общие принципы построения систем автоматического управления (САУ), их расчета, математического моделирования, исследования и настройки. Целью управления является обеспечение требуемого течения процесса в объекте или требуемого изменения его состояния.
Целью выполнения курсовой работы по ТАУ является освоение теоретических методов и получение навыков по применению технологии моделирования сложных систем управления.
Задачи решаемые в курсовой работе :
-
анализ качества исходной САУ; -
синтез методом оптимальных настроек регулятора; -
анализ качества спроектированной САУ; -
анализ точности спроектированной САУ;
Выполнение курсовой работы предусматривает получение дифференциального уравнения и передаточной функции объекта управления и его кривой разгона, исследование устойчивости САУ и качества регулирования.
-
 Разработка структурной схемы и математической модели САУ
Разработка структурной схемы и математической модели САУ
Построим кривую разгона по данным из приложения А таблицы А1 в соответствии с вариантом 1.1. [1, стр. 14]
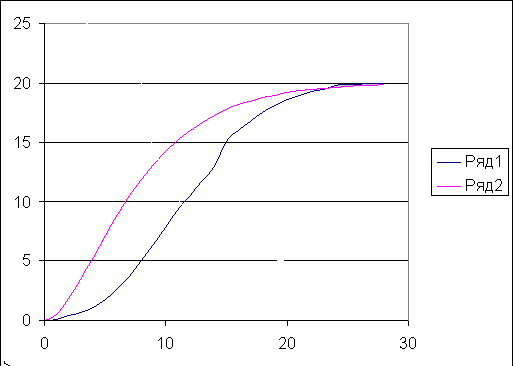
Рисунок 1 – Заданная кривая разгона
Исходные данные:
-
требуемое время регулирования tp=30, -
допустимое динамическое отклонение регулируемого параметра от установившегося значения 1 = 10, -
величина внешнего возмущающего воздействия = 0,6.
Для нахождения передаточной функции разомкнутой системы W(p) аппроксимируем исходную кривую разгона. Для аппроксимации можно выбрать апериодическое звено 2-го порядка или звено чистого запаздывания.
Выберем апериодическое звено 2 порядка, так как оно обеспечивает хороший запас устойчивости по амплитуде и по фазе.
Передаточная функция апериодического звена 2 порядка имеет вид:
Для нахождения значений параметров Т3и Т4составим систему уравнений:
Решив систему уравнений, получим: Т3 = 3,7 и Т4 = 4,3с.
Коэффициент усиления К=20.
Таким образом, получили передаточную функцию разомкнутой системы:
Построим кривую разгона по полученной передаточной функции.
Рассчитаем среднеквадратичное отклонение полученной кривой разгона от заданной:
где уз – заданное значение выходной координаты;
ур – рассчитанное значение выходной координаты;
N – число экспериментальных точек.
Значение sigma не должно превышать 10.
Для полученных значений можно записать:
Полученное значение sigma меньше 10, значит, кривую разгона можно выразить полученной нами передаточной функцией разомкнутой системы:
ω1=1/Т1=0.27 (lg0.27=-0.57 1/c)
ω2=1/Т2= 0.23lg= 0.23=-0.63 1/c)
Структурная схема представленной САУ изображена на рисунке 2,
где W1 – устройство управления:
W2 – объект управления:
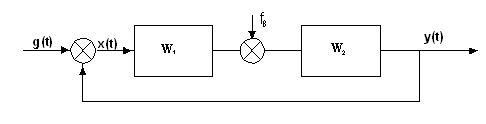
Рисунок 2 – Структурная схема исходной САУ
 2 Анализ качества исходной САУ
2 Анализ качества исходной САУ
-
Главная передаточная функция замкнутой системы:
-
Передаточная функция по возмущению:
Анализ качества системы автоматического управления принято оценивать с помощью следующих показателей – времени регулирования, величины перерегулирования, значения ошибки в установившемся режиме, точности, и числа колебаний регулируемой величины за время переходного процесса.
Интервал времени, по истечении которого отклонение переходной характеристики от установившегося значения не превышает величины d = 5%, называется временем регулирования tp. Время регулирования является основной характеристикой быстродействия системы, т.е. определяет длительность переходного процесса.
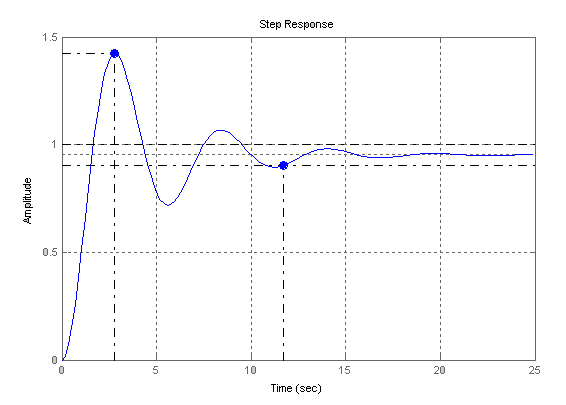
Рисунок 4 – График главной передаточной функции исходной САУ
Анализируя главную передаточную функцию замкнутой системы Ф(р) (рисунок 3), с помощью программного пакета MATLAB, получили следующие характеристики:
Время регулирования tр = 11,7с.
Величина перерегулирования
Определим запасы по фазе и амплитуде исходной САУ, используя графики логарифмических частотных характеристик (рисунок 4).
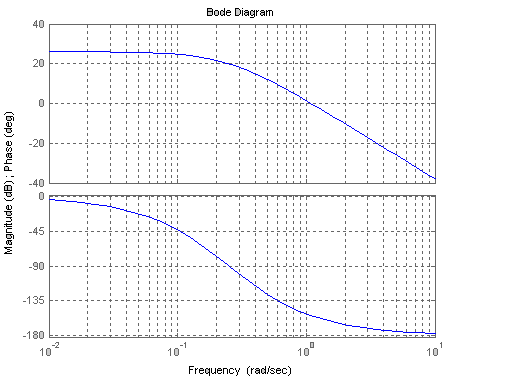
 5 – ЛФЧХ и ЛАЧХ главной передаточной функции исходной САУ
5 – ЛФЧХ и ЛАЧХ главной передаточной функции исходной САУЗапас по фазе: Δφ(ω)= 28 град.
Запас по амплитуде: ΔL(ω) обеспечен.
Построим график передаточной функции по возмущению (рисунок 5 ):
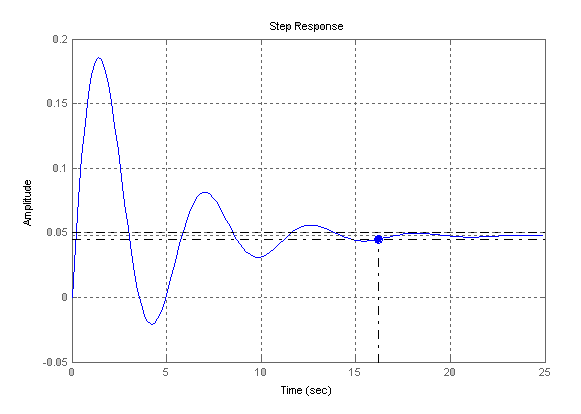
Рисунок 6 – Кривая переходного процесса по возмущению
Время регулирования tр=16,2 с.
В таблице 1 приведены показатели исходной и желаемой САУ.
Таблица 1
| Показатели качества | Перерегулирование σ , % | Время переходного процесса tp | Коэффициент усиления K |
| Желаемые | 30 | 30 | 33.3 |
| Полученные | 49.4 | 11.7 | 20 |
Из анализа качества системы автоматического управления видно, что исходная система не удовлетворяет заданным показателям качества. Повысить качество процесса регулирования можно с помощью синтеза САУ, то есть необходимо изменить динамические свойства системы регулирования с помощью корректирующих устройств.

 3 Синтез корректирующих устройств
3 Синтез корректирующих устройств
Повысить качество процесса регулирования можно с помощью синтеза САУ, т.е. изменяя динамические свойства системы регулирования с помощью корректирующих устройств. Динамические свойства системы автоматического регулирования можно улучшить как последовательными, так и параллельными включениями корректирующих устройств.
Рассмотрим синтез САУ с помощью охватывания звеньев с наихудшими показаниями обратной связью с корректирующим устройством.
Построим ЛАЧХ для исходной системы и для желаемой.
Строим ЛАЧХ для располагаемой САУ (приложение А):
На высоте
Строим ЛАЧХ для желаемой САУ (приложение А):
ЛАЧХ желаемой системы должна соответствовать требованиям качества переходного процесса. Для ее построения, зная желаемое время переходного процесса(tр=15с) определим необходимую частоту среза ωср по формуле:
где
На частоте среза в области сопряженных частот будет наклон ЛАЧХ -20 дБ/дек. Протяженность среднечастотной части желаемой ЛАЧХ рассчитывается по формулам:
где M – показатель колебательности. Я выбрала М=2,25.
В своей курсовой работе я подбирала такие
ωc1 = ωс(M+1)/M =0,24(1.5 + 1)/1.5 = 0.35 с-1,
ωc2 = ωс(M-1)/M = 0,24 (1.5 - 1)/1.5 = 0,05 c-1,
где М = 1,5 – показатель колебательности:
Находим по формулам (5)
Я выбрала такие сопряженные частоты,
Построив ЛАЧХ исходной и желаемой систем, стоим ЛАЧХ корректирующего устройства:
Определяем по графику передаточную функцию последовательного корректирующего устройства: