ВУЗ: Тульский государственный университет
Категория: Методичка
Дисциплина: Компьютерные технологии в проектировании
Добавлен: 19.10.2018
Просмотров: 1707
Скачиваний: 25
6
фильтра, с
100
18
33
10
-6
20
50
9
Насыщающийся реактор
Параметры реактора
Параметры источника
питания
R, ом
a
b
U, кВ
f, гц
2
30
40000
110
50
10
Нелинейный резистор с фильтром
Параметры нелинейного резистора
Параметры источника
питания
I
0
, А
U
0
, кВ
α
Постоянная
времени
фильтра, с
U, кВ
f, гц
230
30
51
10
-8
36
50
3. Требования, предъявляемые к оформлению расчетно-графической работы
1. Пояснительная записка на листах белой бумаги формата А4 на одной стороне
листа с рамкой и основной надписью (ГОСТ 2.104-2006 прил. Б). Пояснительная
записка выполняется машинописным способом с высотой букв и цифр не менее 2,5 мм,
расстояние между строками 8-10 мм.
2. Текст пояснительной записки рекомендуется разбивать на разделы и
подразделы, по ходу текста делать ссылки на использованную литературу.
Следует приводить таблицы и иллюстрации для пояснения текста, используя
сквозную нумерацию. В тексте допускается применять общепринятые сокращения
слов в соответствии с ГОСТ 7.12-93 и ГОСТ 2.106-96.
3. Завершается пояснительная записка списком использованной литературы.
Согласно ГОСТ 7.1-2003 литературу следует располагать в порядке появления
ссылок в тексте.
4. Объем пояснительной записки 10 -15 страниц печатного текста.
5. Разделы пояснительной записки: титульный лист, оглавление, основная
часть, список использованной литературы.
6. Графическая часть работы выполняется на формате А4, распечатанном на
принтере.
4. Теоретические и практические рекомендации по выполнению расчетно-
графической работы
Библиотека блоков Sim Power Systems достаточно обширна, однако, иногда
требуемая пользователю модель устройства может в ней отсутствовать. Это касается
например,
нелинейных
резисторов,
насыщающихся
реакторов,
новых
типов
электродвигателей и т.п. В этом случае пользователь может сам создать нужную модель
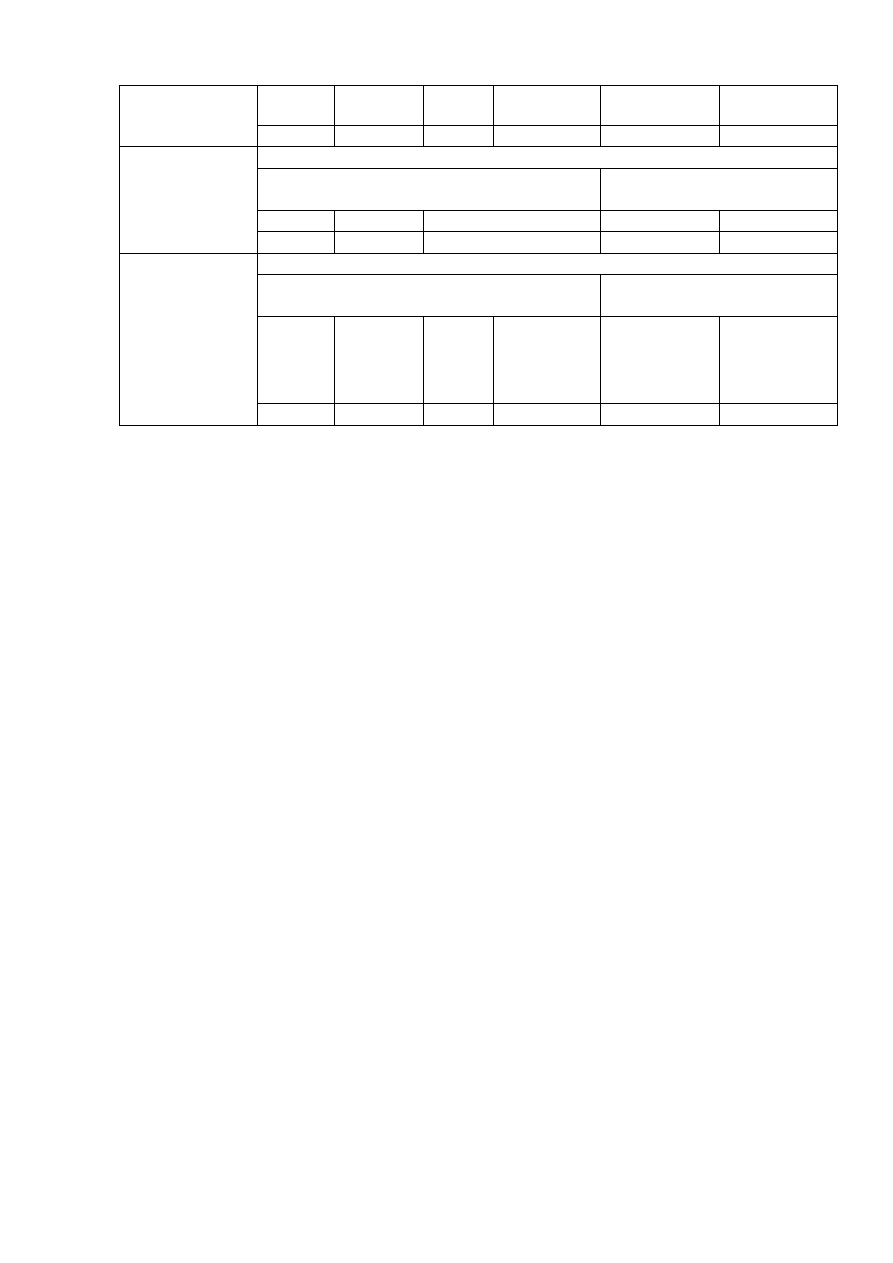
на основе блоков Simulink и блоков SPS. Общая структура модели показана на рисунке 1.

7
Рисунок 1 Общая структура модели
На схеме к управляемому источнику тока параллельно подключен измеритель
напряжения. Между выходом измерителя напряжения и входом источника тока включена
Simulink-модель, реализующая нужную вольт-амперную характеристику устройства.
Параллельно источнику также подключен развязывающий резистор. Его наличие
обусловлено, тем, что большое число блоков SPS выполнено на базе источников тока. При
последовательном соединении таких блоков источники тока оказываются включенными
последовательно, что недопустимо. Наличие же развязывающего резистора позволяет
включать такие блоки последовательно. Величина сопротивления резистора должна
выбираться достаточно большой, чтобы его влияние на характеристики создаваемого
блока было минимально (обычно его величина для силовых электротехнических блоков
выбирается в пределах 500 - 1000 Ом). Зажимами блока являются входной и выходной
порты.
Таким образом, для создания электротехнического блока пользователь, прежде
всего, должен создать обычную Simulink-модель, входом которой является сигнал
пропорциональный
напряжению
на
зажимах
устройства,
а
выходом
сигнал
пропорциональный току устройства, а затем использовать эту модель в схеме
представленной на рисунке 6. При создании многофазных устройств, как правило,
требуется создать модели отдельных фаз, а затем уже включить их по нужной схеме.
4.1 Модель нелинейного резистора
Пусть вольт-амперная характеристика нелинейного резистора задана выражением:
0
0
u
i
I
U
,
где
i
и
u
- мгновенные значения тока и напряжения,
0
U - пороговое значение напряжения,
0
I -величина тока устройства при значении напряжения равном пороговому,
-
показатель
степени,
определяющий
нелинейность
вольт-амперной
характеристики резистора (обычно лежит в пределах от 0 до 50).
Схема блока нелинейного резистора показана на рисунке 2. Модель Simulink
резистора реализована с помощью блока Fcn. Численные значения параметров приняты
следующими:
0
U =110 кВ,
0
I =500 А,
=24.
8
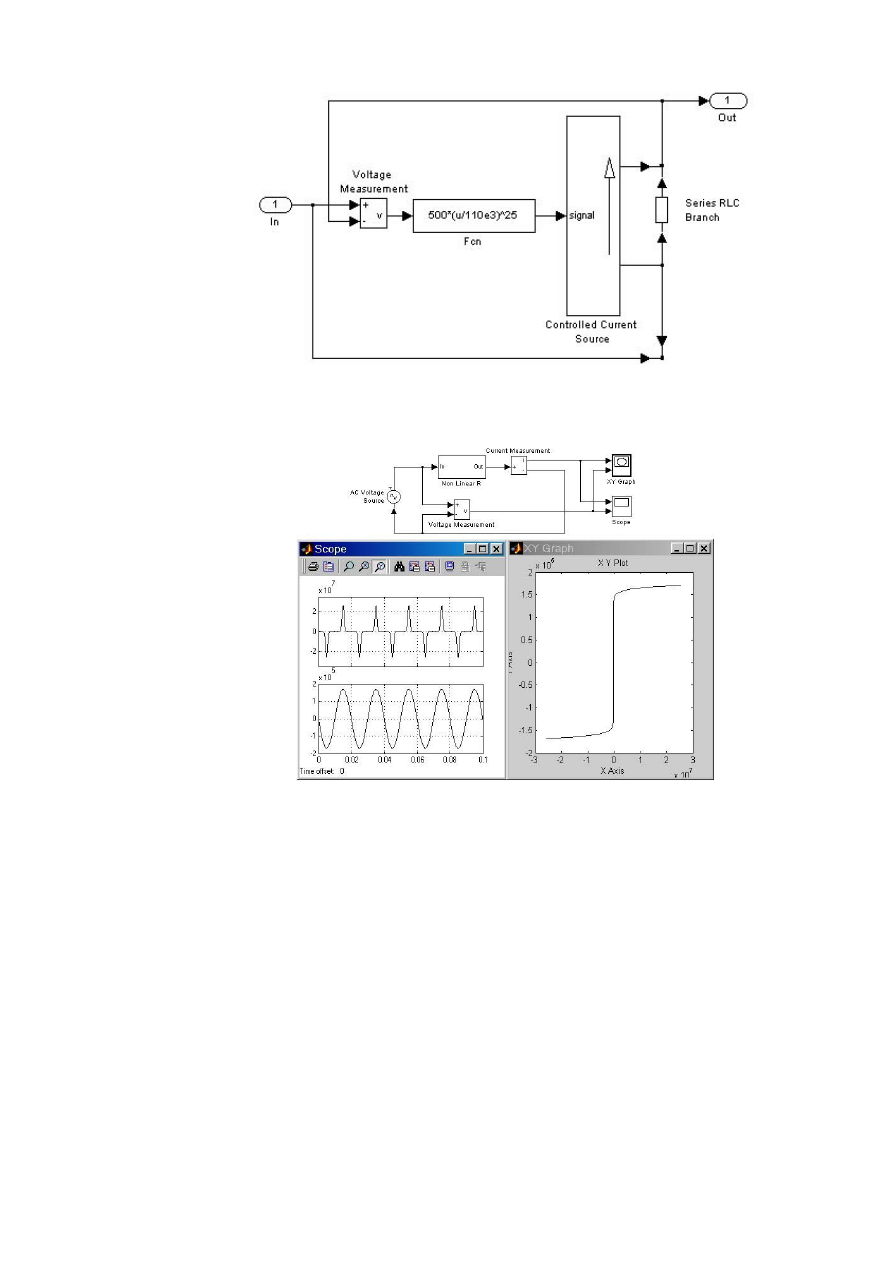
Рисунок 2 Схема блока нелинейного резистора
Схема всей модели и диаграммы ее работы показаны на рисунке 8.
Рисунок 3 Схема всей модели нелинейного резистора и диаграммы ее работы
На схеме показаны датчики тока и напряжения, снимающие сигналы
пропорциональные этим переменным. Графопостроитель XY-Grraph по этим сигналам
строит вольт-амперную характеристику резистора. Временные диаграммы тока и
напряжения также иллюстрируют нелинейность характеристики резистора.
Некоторым
недостатком
такой
модели
резистора
является
наличие
безинерционного замкнутого контура образованного датчиком напряжения, блоком Fcn и
управляемым источником тока (рисунок 2). Simulink выполняет расчет таких моделей
используя итерационную процедуру, что несколько снижает скорость расчета. Также при
наличии замкнутых алгебраических контуров становится невозможным расчет модели в
ускоренном режиме (Acceleration mode). Чтобы разорвать безинерционный контур
достаточно включить в линию между датчиком напряжения и источником тока фильтр с
малой постоянной времени. Величина постоянной времени должна выбираться таким
образом, чтобы изменение динамических свойств модели было минимальным (обычно
величина постоянной времени фильтра выбирается в пределах от 10
-8
- 10
-6
). Схема
модели нелинейного резистора с использованием фильтра показана на рисунке 4.

9
Рисунок 4 Схема модели нелинейного резистора с использованием фильтра
4.2 Модель насыщающегося реактора
Методика создания модели нелинейной индуктивности ничем не отличается от
аналогичной методики для нелинейного резистора.
Уравнения описывающие насыщающийся реактор выглядят следующим образом:
3
;
d
u
Ri
dt
i
a
b
,
где
i
,
u
,
- мгновенные значения тока, напряжения и потокосцепления,
a
,
b -
коэффициенты нелинейной зависимости между потокосцеплением и током.
Первое из уравнений есть дифференциальное уравнение для напряжения на
реакторе, а второе - алгебраическая зависимость между потокосцеплением и током
реактора. Последнее уравнение может быть и другим, в зависимости от требований к
точности аппроксимации нелинейности реактора.
Для создания Simulink-модели реактора требуется сначала перейти к операторной
форме записи дифференциального уравнения для напряжения реактора:
u p
Ri p
p
p
,
а затем, получить передаточную функцию (ПФ), связывающую потокосцепление и
напряжение:
u p
Ri p
p
p
.
Полученные передаточная функция и нелинейная зависимость между током и
потокосцеплением дают возможность создать Simulink-модель реактора. Схема Simulink-
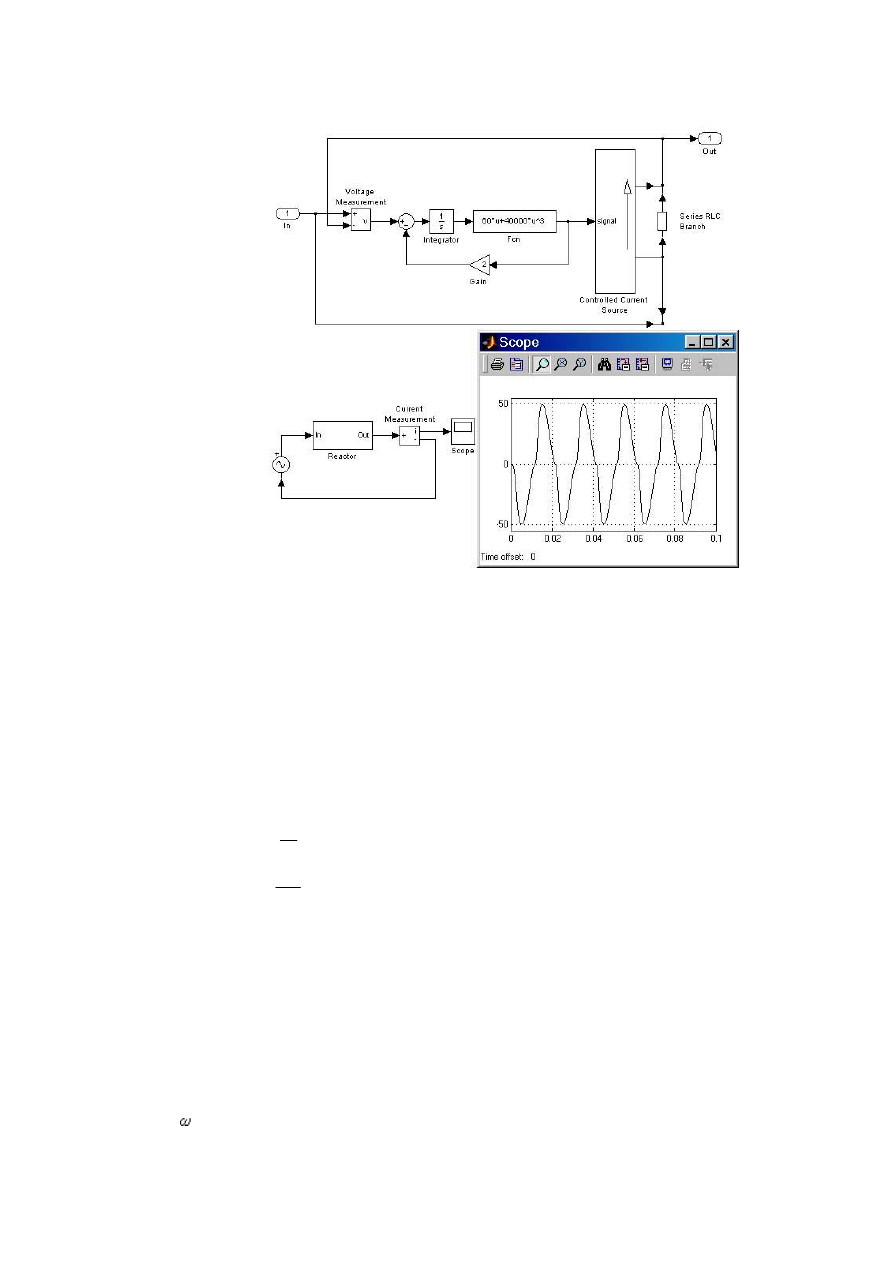
модели показана на рисунке 5.
Рисунок 5 Схема Simulink-модели
На схеме величина активного сопротивления реактора принята равной 2 Ом, а
коэффициенты а = 60 иb=40000. Далее, используя шаблон SPS-модели (рисунок 1) не
10
трудно создать модель насыщающегося реактора полностью. Схема всей модели, SPS-
модель реактора и временные диаграммы работы модели показаны на рисунке 6.
Рисунок 6 SPS-модель реактора и временные диаграммы работы модели
Несинусоидальный характер тока реактора иллюстрирует нелинейные свойства
реактора.
4.3 Модель двигателя постоянного тока с независимым возбуждением
Двигатель постоянного тока независимого возбуждения (рисунок 7), описывается
следующей системой дифференциальных и алгебраических уравнений в абсолютных
единицах:
di
u
e
Ri
L
dt
,
(1)
C
d
M
M
J
dt
,
(2)
M
M
C
i
,
(3)
e
C
,
(4)
где
u- напряжение на якорной обмотке двигателя,
e- электродвижущая сила (ЭДС) якоря,
i- ток якоря,
Ф- поток, создаваемый обмоткой возбуждения,
M- электромагнитный момент двигателя,
M
С
- момент сопротивления движению,
- скорость вращения вала двигателя,
R- активное сопротивление якорной цепи,