Файл: Разработка интерфейса оператора АСУ в SCADA Trace Mode.pdf
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Методичка
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 4572
Скачиваний: 146
16
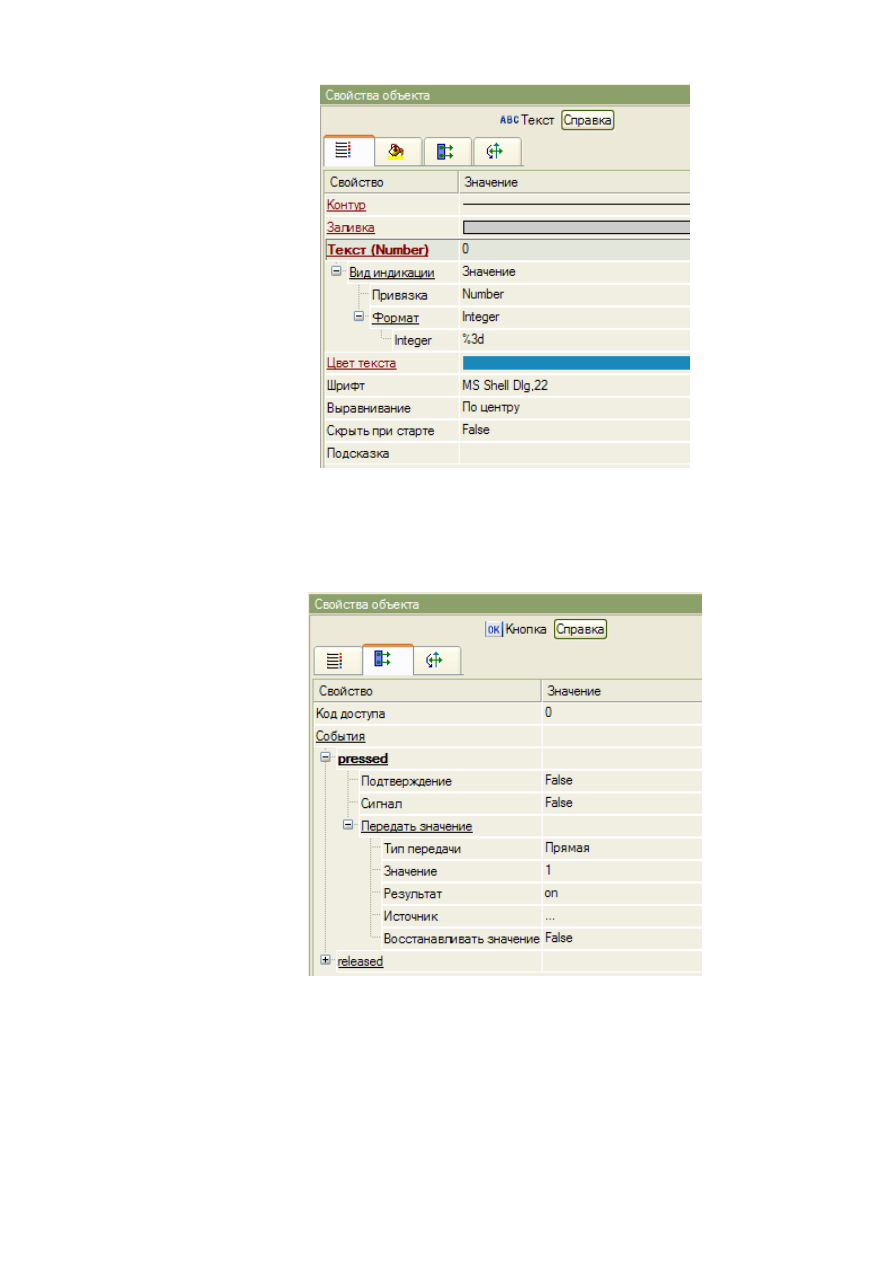
Рисунок 20 – Установка свойств графического элемента Текст
5. В свойствах Кнопки «start» создайте событие Send Value – Передать значение. В
поле Тип передачи выберите «Прямая», в поле Значение введите 1, в поле Результат
сделайте привязку к аргументу экрана on. (см. рис. 21)
Рисунок 21 – Установка свойств кнопки «start»
6. В свойствах Кнопки «stop» создайте событие Send Value – Передать значение. В
поле Тип передачи выберите «Прямая», в поле Значение введите 0, в поле Результат
сделайте привязку к аргументу экрана on.
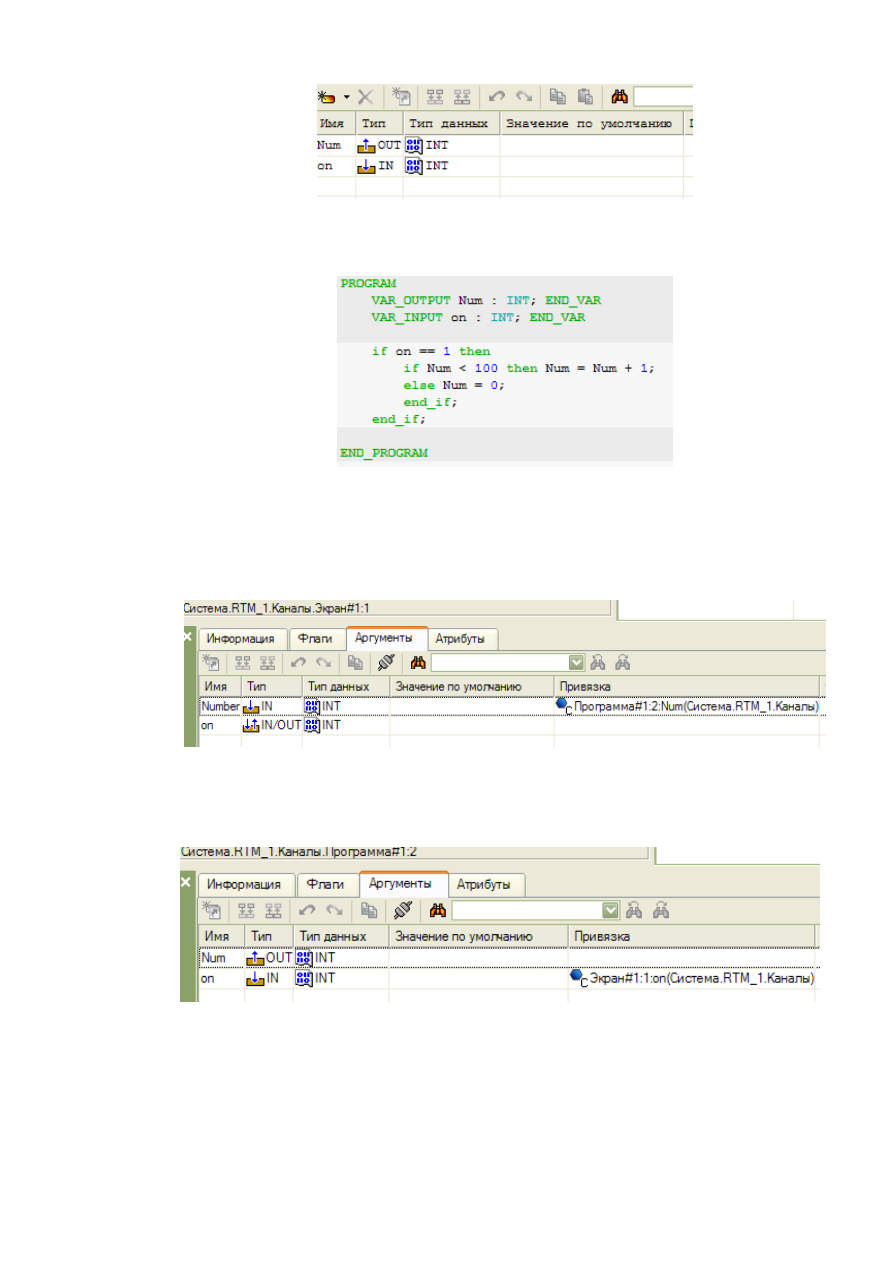
7. Создайте компонент Программа. Перейдите к созданию аргументов программы.
Создайте аргументы как на рис 22.
17
Рисунок 22 – Создание аргументов программы
8. Добавьте код в программу, например как на рис. 23.
Рисунок 23 – Окончательный вид программы
9. Откомпилируйте программу: Программа
Компиляция (или F7).
10.
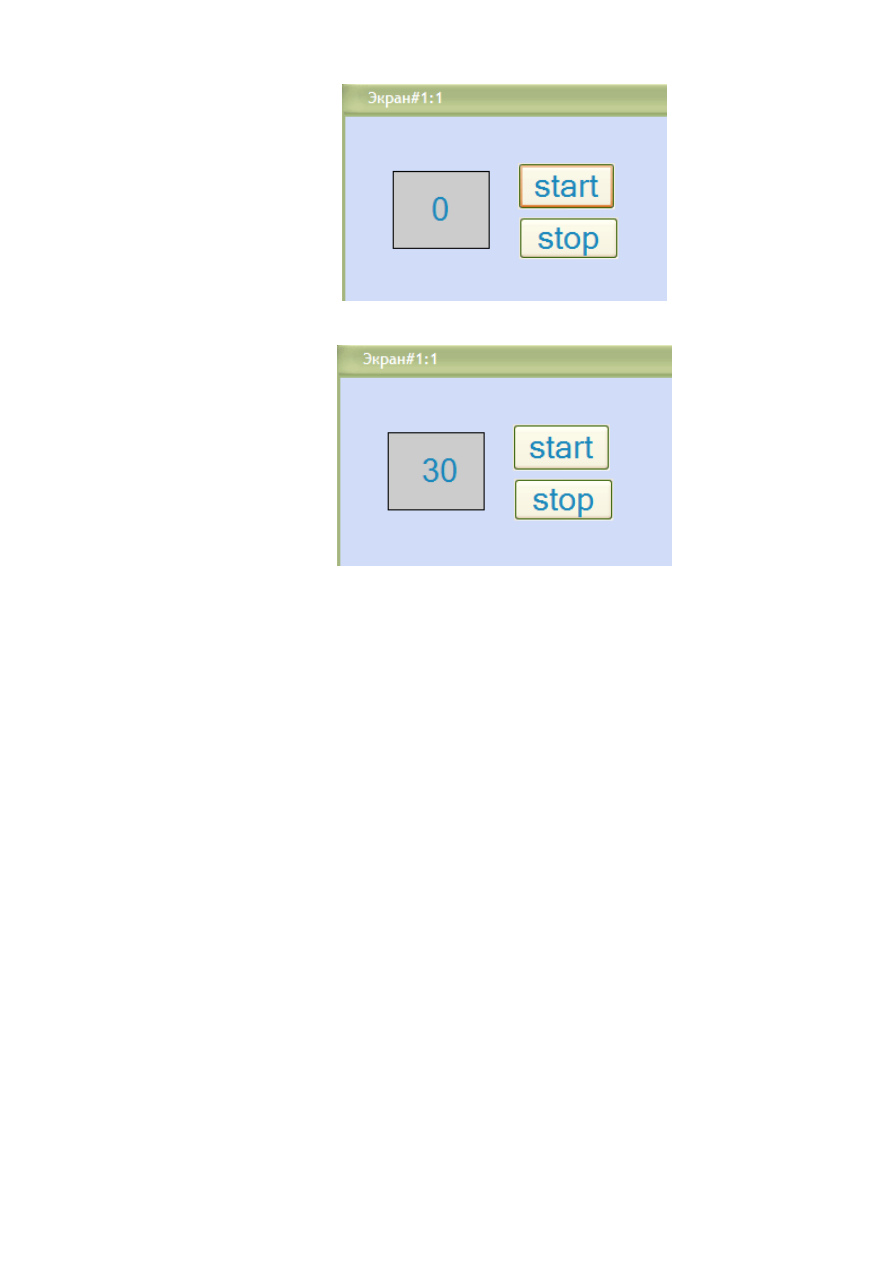
Перейдите в свойства канала вызова экрана узла RTM. В закладке
Аргументы привяжите аргумент экрана Number к аргументу программы Num (см. рис 24).
Рисунок 24 – Привязка аргумента канала экрана к аргументу канала программы
11.
Перейдите в свойства канала вызова канала узла RTM. В закладке
Аргументы привяжите аргумент канала on к аргументу экрана on (см. рис 25).
Рисунок 25 – Привязка аргумента канала экрана к аргументу канала программы
12.
Сохраните проект (Файл
Сохранить). Сохраните проект для монитора
реального времени (Файл
Сохранить для МРВ). Запустите профайлер (ФайлОтладка).
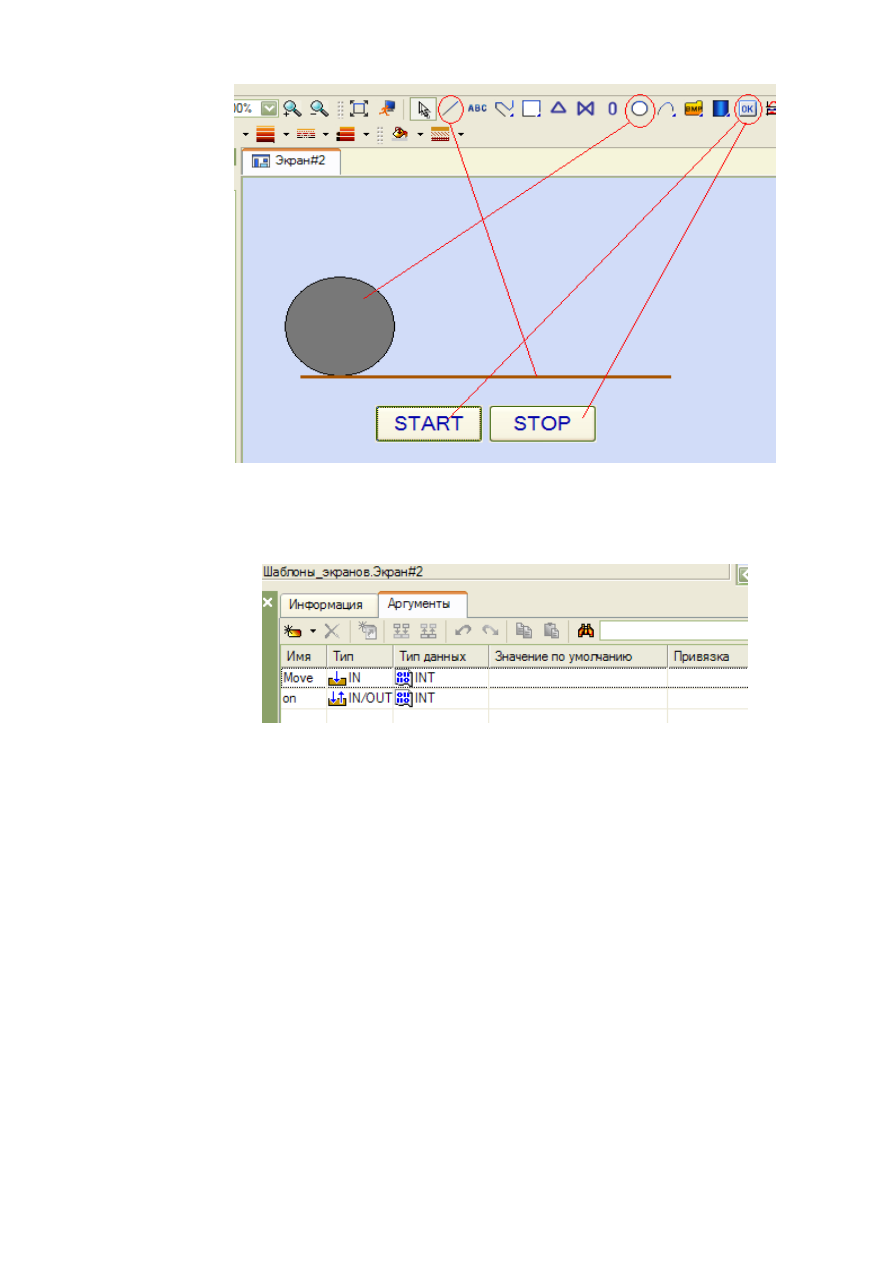
Результат выполненного проекта смотрите на рис. 26.1 и рис 26.2.
18
Рисунок 26.1 – Перед началом счета
Рисунок 26.2 – После работы счетчика
13.
Остановите выполнение проекта. Закройте профайлер.
Задание 3 (Движение объекта)
По нажатию на кнопку «start» объект начинает двигаться. По нажатию на кнопку
«stop» объект останавливается. Движение объекта начинается с момента, на котором он
был остановлен. После прохождения объектом траектории движения, он начинает
движение заново.
1. Выполните пункты с 1 по 5 примера 1.
2. Перейдите к редактированию экрана. Создайте графические элементы как на рис.
27.
19
Рисунок 27 – Размещение графических элементов на экране
3. В шаблоне экрана создайте 2 аргумента типа int: Move (IN) и on (IN/OUT).
Экран
ПКСвойстваАргументы (см. рис. 28).
Рисунок 28 – Создание аргументов экрана
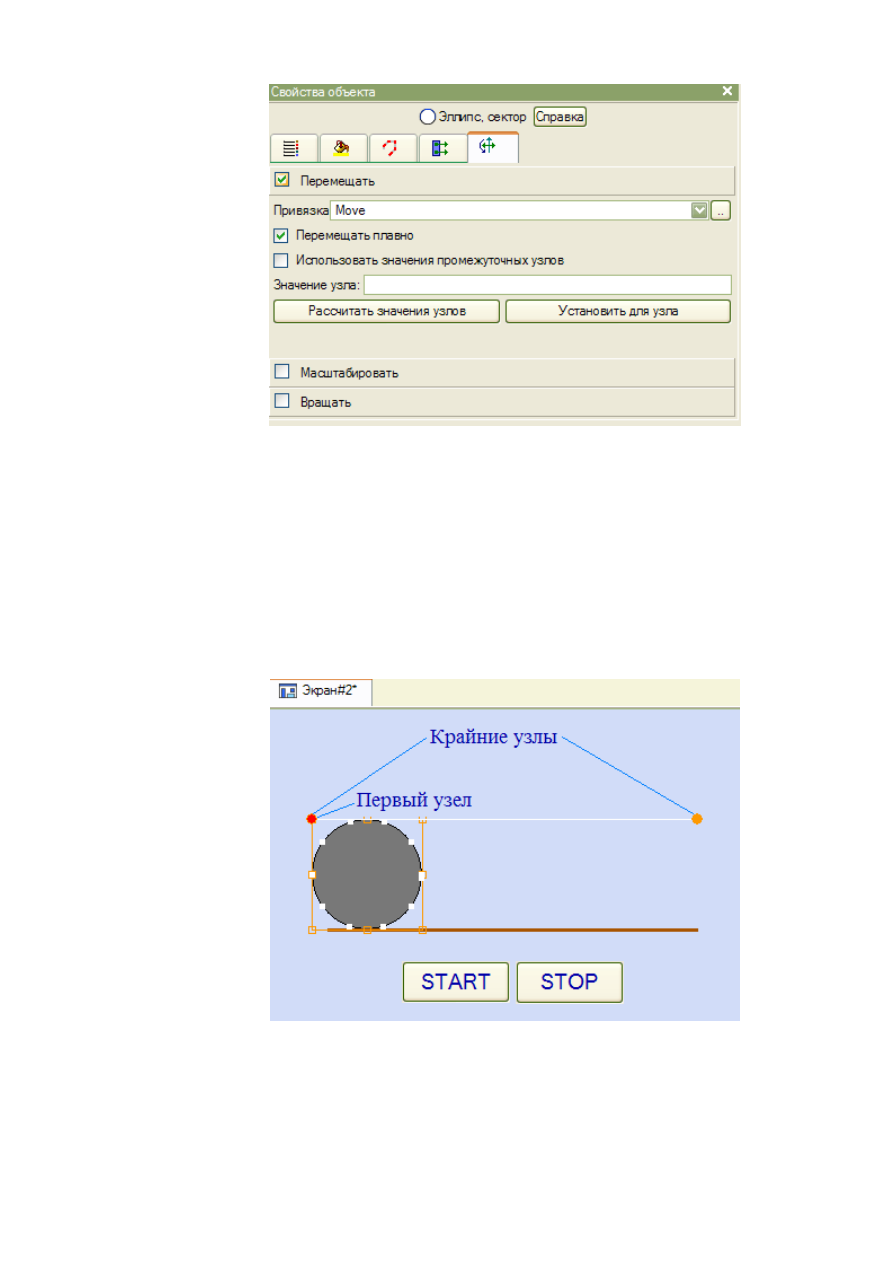
4. В свойствах Сферы перейдите на вкладку Динамическая трансформация.
Установите флаг «Перемещать». Теперь установите привязку к аргументу экрана Move.
(см. рис. 29.1 и рис 29.2)
При работе в реальном времени ГЭ перемещается вдоль траектории, которая
задается как ломаная линия (количество узлов ломаной не ограничено). Текущее
положение ГЭ зависит от значения привязанного аргумента (числовой аргумент для
привязки выбирается в списке Привязка, от значений, заданных для узлов траектории, и
флага Перемещать плавно.
Под заданием траектории понимается задание положения ее узлов и задание
значений для этих узлов.
20
Рисунок 29.1 – Свойства объекта Эллипс
По умолчанию траектория динамического перемещения представляет собой
отрезок от точки привязки ГЭ до центра ограничивающего прямоугольника, т.е. имеет 2
узла. Значения для этих узлов устанавливаются равными 0 и 100 соответственно
(значение, заданное для узла, отображается в окне Значение узла при наведении курсора
на узел).
Узел, первоначально размещенный в точке привязки ГЭ (обозначается красной
точкой), остается крайним узлом при любых манипуляциях с траекторией и в дальнейшем
называется первым узлом.
Рисунок 29.2 – Обозначение траектории движения сферы
Значения для крайних узлов траектории задаются вручную. Для этого нужно
выделить крайний узел, ввести число в окне Значение узла и нажать кнопку Установить
для узла.