Файл: Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2020
Просмотров: 6058
Скачиваний: 170

чивают радиолокационные визирные системы. Кроме того, при прочих равных
условиях БРЛС обеспечивает в любых метеоусловиях наибольшую дальность
захвата цели на автосопровождение, предопределяя тем самым наименее жест
кие требования к продолжительности функционирования радиоэлектронной
системы управления на этапе самонаведения.
Проблема сопряжения методов управления, используемых на этапах даль
него и ближнего наведения, становится более актуальной в связи с перспекти
вой смешанного управления, подразумевающего совместное использование
методов командного наведения и самонаведения. В рамках этой концепции в
основе этих методов должны лежать одни и те же закономерности, требующие
одинакового информационного обеспечения и отличающегося только конеч
ным представлением параметра рассогласования.
Еще одной особенностью перспективных методов наведения является их
согласование с перечнем и дискретностью передачи управляющих сигналов
командной радиолинией управления. В существующих КРУ управляющие сиг
налы традиционно передаются в виде требуемых значений курса ψ, высоты Η и
скорости V [2]. Однако потребности наведения на сверхманевренные и гипер
звуковые летательные аппараты предопределяют и необходимость передачи
ряда дополнительных фазовых координат, в том числе и производных дально
сти, высоты и скорости.
Кроме того, при наведении на эти типы ЛА требуются существенно мень
шие временные интервалы передачи команд, что обусловливает использование
в БРЛС АК РЛДН фазированной антенной решетки и увеличение пропускной
способности КРУ.
В перечне ограничений, налагаемых информационными системами на
возможности методов наведения обеспечивать всеракурсный перехват, одно из
важнейших мест занимает наличие зон доплеровской режекции [16]. Наличие
этих зон, обусловленных доплеровским принципом построения бортовых РЛС,
приводит к потере информации о целях или наводимых ЛА, движущихся на
ракурсах, близких к четырем четвертям (90°) к линии визирования.
Радикальных средств снижения отрицательного влияния зон режекции на
информационные возможности АК РЛДН до настоящего времени не найдено.
Наиболее приемлемым способом снижения этого недостатка является одно
временное использование нескольких АК РЛДН в рамках единой многопози
ционной информационно-управляющей системы.
Еще одним очень серьезным ограничением, налагаемым информационны
ми системами на используемые методы наведения, является применение про
тивником средств радиоэлектронного подавления, применение которых приво
дит к потере информации, поступающей от БРЛС. Следует подчеркнуть, что
снижение влияния радиопротиводействия противника может быть достигнуто
за счет как повышения эффективности средств помехозащиты, так и за счет

специальных методов наведения с повышенной скрытностью [17], суть некото
рых из них изложена в п.8.2.
Способы получения алгоритмов траекторного управления, удовлетворяю
щих изложенным выше требованиям, могут быть различными. Из них наиболее
предпочтительными являются способы, одновременно наилучшие по точности
и экономичности, обеспечивающие минимум квадратичных функционалов ка
чества, в которых учитываются и ошибки управления, и затраты энергии на его
осуществление. Эта задача решается при использовании математического ап
парата статической теории оптимального управления (СТОУ) [33, 34]. В про
стейшем случае аппарат СТОУ для системы
(8.1)
предназначенной для отработки процесса
(8.2)
при наличии измерений
(8.3)
позволяет сформировать сигнал управления
(8.4)
оптимальный по минимуму локального функционала качества
(8:5)
- n-мерные векторы требуемых и управляемых ко
ординат; F и F
T
- динамические матрицы, учитывающие внутренние связи
процессов (8.1) и (8.2); В
у
- матрица эффективности r-мерного (г<п) вектора
сигналов управления и; ζ — m-мерный (m < 2п) вектор измерения; Η - модуля
ционная матрица связи обобщенного вектора состояния и измере
ний; Q и К - матрицы штрафов за точность функционирования и величину
сигналов управления; - векторы оптимальных оценок процессов (8.1)
и (8.2); Μ - математическое ожидание функционала (8.5) при условии, что
имеются измерения (8.3).
Следует подчеркнуть, что в зависимости от выбранных моделей (8.1)-(8.3)
и функционала качества (8.5) могут быть получены различные варианты мето
дов наведения.

8.2. Способы повышения скрытности методов
наведения
Спецификой работы АК РЛДН является чрезвычайная насыщенность раз
личного рода радиоизлучающими средствами, демаскирующими его работу. В
связи с этим повышение скрытности функционирования является настоятель
ной необходимостью дальнейшего повышения его боевой эффективности и
живучести [11].
В общем случае под скрытным наведением понимают процесс вывода ле
тательного аппарата в область применения оружия со значительно сниженной
вероятностью регистрации факта излучения его бортовой РЛС.
В приложении к АК РЛДН решение проблемы скрытного наведения
содержит несколько направлений:
1) связано с обеспечением скрытности работы информационных систем
самого АК РЛДН;
2) связано с повышением скрытности и имитостойкости передаваемых ко
манд;
3) характеризуется повышением скрытности самого процесса наведения
летательных аппаратов.
Ниже основное внимание будет уделено первому и третьему направлени
ям. В основе этих направлений лежит уменьшение времени работы РЛС наво
димых самолетов и АК РЛДН на излучение.
Наиболее простым вариантом уменьшения времени работы РЛС управ
ляемых объектов на излучение является прием, суть которого состоит в их
выводе не на рубеж захвата целей бортовыми локаторами, а непосредственно
в область применения оружия (рис. 8.1). В такой ситуации управляемый объ-
Рис.
8.1

ект становится лишь неизлучающим средством доставки ракет в область пуска.
Конечным этапом этого приема является выдача команд целеуказания ракетам
непосредственно с АК РЛДН либо после включения РЛС самолета-доставщика
на очень короткое время, достаточное лишь для формирования этих команд [17].
Предпосылками реализации этого способа являются увеличенная даль
ность действия РЛС АК РЛДН и ее способность обращаться к цели с малым
временным интервалом за счет использования ФАР, а также большие зоны за
хвата цели по угловым координатам современных радиолокационных головок
самонаведения [2].
Рассмотренный прием имеет еще одно достоинство: он позволяет расши
рить поле условий применения ракет дальнего боя для вариантов, когда даль
ность их пуска превышает дальность захвата цели бортовыми РЛС истребителя
[24]. Необходимо, однако, подчеркнуть, что для обеспечения дальнего пуска
ракет необходимо знать тип ракеты, формировать на АК РЛДН команду, по ко
торой начинается ее подготовка к пуску, и рассчитывать условия формирова
ния команды «пуск разрешен»:
где соответственно дальность до цели от наводимого са
молета, максимально и минимально разрешенные дальности пуска; φ
Γ
и φ
Β
-
бортовые пеленги целей в горизонтальной и вертикальной плоскостях с наво
димого истребителя.
Дальнейшим развитием этого приема является передача на пущенную ра
кету команд радиокоррекции (РК) непосредственно с АК РЛДН (рис. 8.1). Для
решения последней задачи необходимо согласование частотных диапазонов
работы РЛС АК РЛДН и радиолокационных головок самонаведения ракет.
Другой прием скрытного наведения основан на использовании полуактив
ного режима, суть которого состоит в том, что АК РЛДН облучает цель, а РЛС
управляемого самолета работает в режиме приема вплоть до точки пуска раке
ты (рис. 8.2) и по возможности с формированием команд радиокоррекции. Не
достатком этого приема является необходимость согласования частотных диа
пазонов РЛС АК РЛДН и РЛС наводимого самолета.
Более сложной разновидностью этого способа, позволяющей избежать со
гласования частотных диапазонов, является использование двух АК РЛДН,
один из которых на большой дальности облучает цель, а второй, принимая от
раженный от нее сигнал, оценивает все необходимые фазовые координаты и
формирует команды наведения для управляемого самолета, движущегося в ре
жиме радиомолчания вплоть до пуска ракет по этой цели (рис. 8.3).
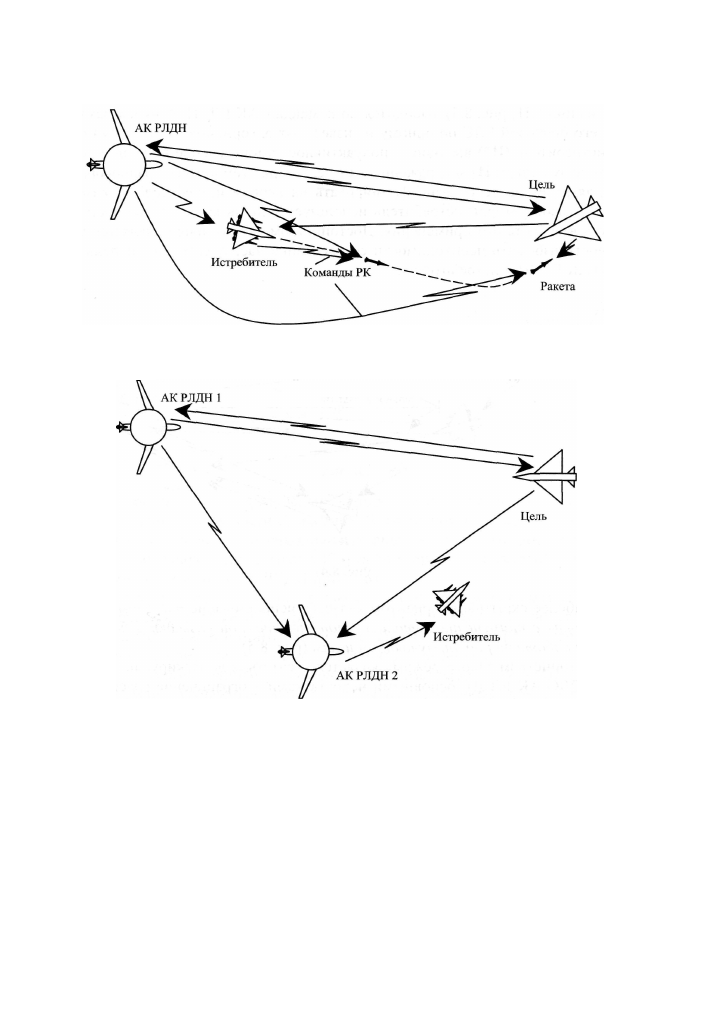
Рис. 8.2
Рис. 8.3
Достоинством полуактивного способа является возможность выполнения
скрытного всеракурсного наведения самолетов на любые типы радиоконтраст
ных целей. Недостатки - сложности синхронизации излучающей и приемной
систем, необходимость согласования плоскостей поляризации передающей и
приемной антенн, усложнения алгоритмов обработки сигналов на приемной
стороне и уязвимость от средств функционального поражения [15].
Еще один вариант повышения скрытности ударного самолета — ис
пользование для наведения на одну цель двух истребителей. В такой ситуации