Файл: Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2020
Просмотров: 6045
Скачиваний: 170
---2008341.png)
7.4.5. Палубный самолет дальнего радиолокационного обнаружения
и управления «Хокай-2000» с БРЛС типа АФАР
Комплекс «Хокай-2000» является модернизированным (пятое поколение)
вариантом системы Е-2С (рис. 7.13).
Рис. 7.13
Основные ТТХ палубного самолета «Хокай» (экипаж самолета состоит из
двух летчиков и трех операторов) представлены ниже:
Максимальная взлетная масса 24,6 τ
Максимальная скорость полета на высоте 4000 м 600 км/ч
Крейсерская скорость 576 км/ч
Продолжительность патрулирования на удалении 370 км от корабля 5,5 ч
Практический потолок 8,8 км
Максимальная перегоночная дальность полета 2700 км
Геометрические размеры:
длина фюзеляжа 17,54 м
размах крыла/в сложенном положении 24,56/8,94 м
высота (с учетом обтекателя РЛС) 5,58 м
Главными задачами при модернизации комплекса Е-2С по программе соз
дания системы «Хокай-2000» и в дальнейшем «Усовершенствованный «Хо
кай», являются:
1) обеспечение обнаружения воздушных целей всех типов как над мор
ской поверхностью, так и в приобрежных зонах и над земной поверхностью со
сложным рельефом местности;
2) увеличение в 1,5 раза дальности обнаружения и сопровождения мало
размерных, малозаметных, малоскоростных и высокоскоростных воздушных
целей и надводных целей (ракетных и торпедных катеров, перископов подвод
ных лодок, малых судов в прибрежной зоне);
3) обнаружение момента пуска и сопровождение противокорабельных и
крылатых ракет с различных носителей (воздушных, морских);
4) увеличение одновременно сопровождаемых воздушных целей (до 2600);
5) повышение помехозащищенности и электромагнитной совместимости
за счет пространственно-временной обработки сигналов.
Элементы бортового радиоэлектронного комплекса условно сведены в
шесть основных взаимосвязанных подсистем: обнаружения, опознавания, нави
гации, связи и передачи данных, обработки данных, отображения и управления.
Главным отличием комплекса оборудования «Усовершенствованный Хокай»
является использование новой импульсно-доплеровской БРЛС с активной фа
зированной антенной решеткой AN/APS-XX.
Как и ранее, антенная решетка расположена во вращающемся обтекателе
размером 7,32 χ 0,77 м и имеет антенную структуру из 18 элементов, работаю
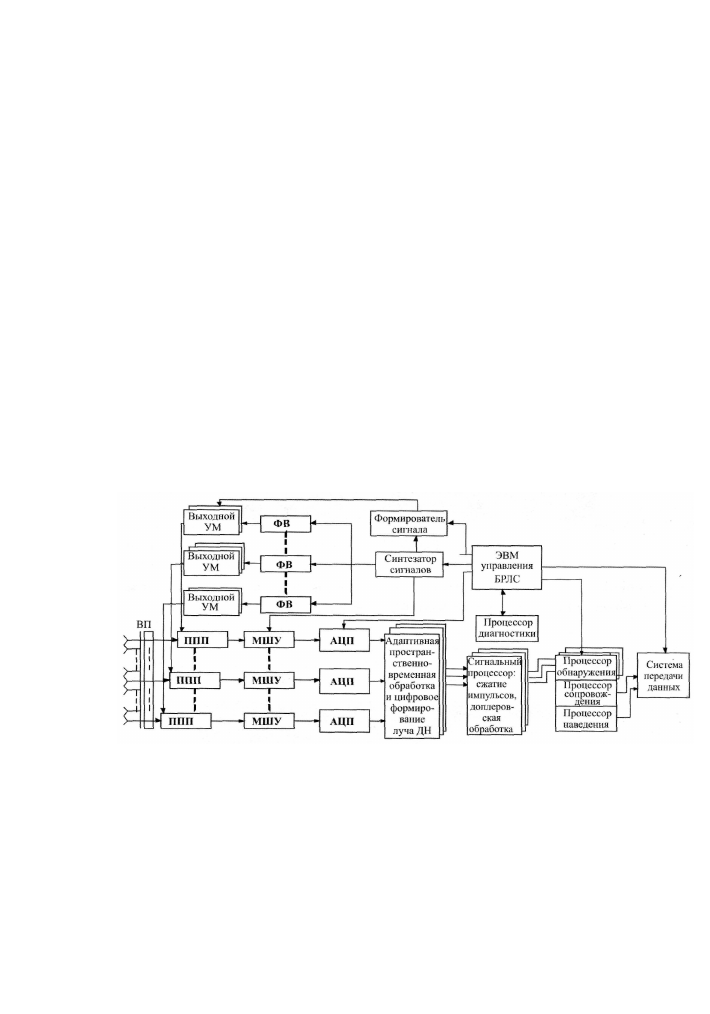
щих в Р-диапазоне (415.. .450 МГц). Структура БРЛС показана на рис. 7.14.
Рис. 7.14
Высокостабильный опорный генератор и синтезатор сигналов обеспечи
вают когерентность всего тракта РЛС и формирование всех высокочастотных
сигналов и сигналов синхронизации.
При помощи фазовращателей ФВ обеспечивается требуемое фазовое рас
пределение излучаемой ЭМВ на апертуре антенны и, соответственно, положе
ние по азимуту и форма ДН антенны на передачу. Формирователь зондирую-

щего сигнала и усилители мощности передающих модулей обеспечивают не
обходимую форму и мощность излучаемых импульсов.
При приеме отраженной ЭМВ каждый элемент антенной решетки при по
мощи переключателей прием-передача ППП подсоединяется на вход своего
малошумящего усилителя МШУ. На выходе МШУ аналоговые сигналы при
помощи АЦП преобразуются в цифровые сигналы.
Соединение элементов антенной решетки с приемопередающими модуля
ми осуществляется через вращающийся переход ВП.
Диаграмма направленности на прием формируется в цифровом виде про
цессором.
При механическом круговом вращении антенной решетки со скоростью
6 об/мин (один оборот за 10 с) одновременно может проводиться электронное
сканирование ДН в секторе ±60° с различной скоростью.
Адаптивная пространственно-временная обработка сигналов обеспечивает:
1) формирование нулей ДН антенны в направлении источников помех
(станции РЭП; телевизионные, связные и другие станции, работающие в этом
же диапазоне частот);
2) оптимизацию селекции сигналов воздушных и надводных целей на лю
бом мешающем фоне;
3) повышение эффективности обнаружения и захвата сигналов малораз
мерных целей и точности измерения координат.
Процессоры сопровождения и наведения обеспечивают решение задач
целеуказания и наведения своих истребителей и ракет на воздушные и мор
ские цели.
Преимуществом новой РЛС является возможность изменения в широком
диапазоне параметров сигналов излучения и алгоритмов обработки. Пере
стройка несущей частоты производится от одной когерентной пачки импульсов
к другой. Модуляция сигнала внутриимпульсная, частотная 0,5...3,5 МГц (ко
эффициент сжатия импульсов 100...700). Длительность зондирующих импуль
сов 1...20; 50; 100 и 150 мкс, частота повторения импульсов 125... 1500 Гц. Вы
бор сигналов проводится в зависимости от решаемых задач и сложившейся ра
диоэлектронной обстановки.
Дальность обнаружения малоразмерной низколетящей цели составляет
340 км (максимальная дальность действия - 620 км), а разрешающая способ
ность по дальности — 45 м.
Дальнейшая модернизация комплекса «Хокай» предполагает использовать
в надфюзеляжном обтекателе три неподвижных АФАР в виде равностороннего
треугольника, что обеспечит электронное сканирование ДН антенны в круго
вом секторе. Диапазон рабочих частот АФАР будет изменен в сторону L-,
S-диапазонов.

7.4.6. Самолет базовойпатрульнойавиации Р-8А «Посейдон»
В США разработан новый самолет БПА Р-8А «Посейдон», который дол
жен заменить существующие самолеты Р-ЗС «Орион». Важной особенностью
нового самолета является применение в составе бортового разведывательного
оборудования РЛС, имеющей возможность вести разведку в режимах синтези
рования апертуры и инверсного синтезирования. Последний режим особенно
эффективен при решении задач по разведке надводных целей (включая задачу
обнаружения перископов подводных лодок).
Бортовая радиолокационная система РЛС AN/APY-10, которая является
модернизированным вариантом AN/APS-137(V)S, была разработана как поис
ковая, способная обнаруживать и сопровождать наземные цели, перископы и
шноркели подводных лодок. Она имеет широкие возможности в плане иденти
фикации обнаруженных целей, оценки боевых потерь и слежения. Более эф
фективное обнаружение перископов подводных лодок обеспечивается за счет
использования цифрового сканирующего конвертера и малошумящего преду-
силителя на входе. Архитектура ИРСА позволяет вести съемку с высоким раз
решением, повышает возможности по распознаванию (классификации) малых
быстродвижущихся целей, располагающихся недалеко от берега. Основные
функциональные возможности РЛС:
1) обнаружение и слежение за наземными (надводными) целями на боль
шом расстоянии;
2) более надежное обнаружение перископов;
3) ведение морской разведки с большой высоты;
4) сопровождение множественных целей;
5) высокая устойчивость к подавлению и противодействие ложным целям;
6) управление на программном уровне;
7) совместимость с системами управления ракетами «Гарпун», «Томахок»
и другими;
прямое взаимодействие с системами управления оружием.
Радиолокационная система работает в режимах:
РСА (длительность импульса 13,2 мкс, средняя мощность 350 Вт, разре
шение 2.. .200 м, частота следования импульсов зависит от дальности);
ИРСА (соответственно 10 мкс, 230...500 Вт; разрешение 0,6...1,2 м и
500... 1000 Гц);
обнаружение перископов (5 мкс, 460 Вт и 1,854 кГц);
поиск/навигация (10 мкс, 200 Вт и 388 Гц).
Также планируется оснастить самолет комплексом электронного противо
действия, состоящим из системы управления средствами РЭБ AN/ALQ-213 (V),
системы направленных ИК-помех, системы предупреждения о радиолокацион
ном облучении и системы постановки активных помех.
7.4.7. Информационно-разведывательные комплексы
на аэростатах и дирижаблях
Аэростаты и дирижабли, оснащенные информационно-разведывательны
ми комплексами, могут обеспечить выполнение функциональных задач ком
плексов типа Авакс, Хокай и Джистарс.
Главным преимуществом таких комплексов по сравнению с авиационны
ми является возможность непрерывного при неограниченной длительности
контроля воздушного, надводного и наземного пространства в заданной зоне
ответственности при минимальной стоимости жизненного цикла (создания,
применения и технической эксплуатации). Так, стоимость эксплуатации аэро
статного комплекса в течение года может быть на порядок меньше эксплуата
ции комплекса типа АВАКС, а стоимость обеспечения зоны обзора протяжен
ностью 1000 км - в три раза меньше.
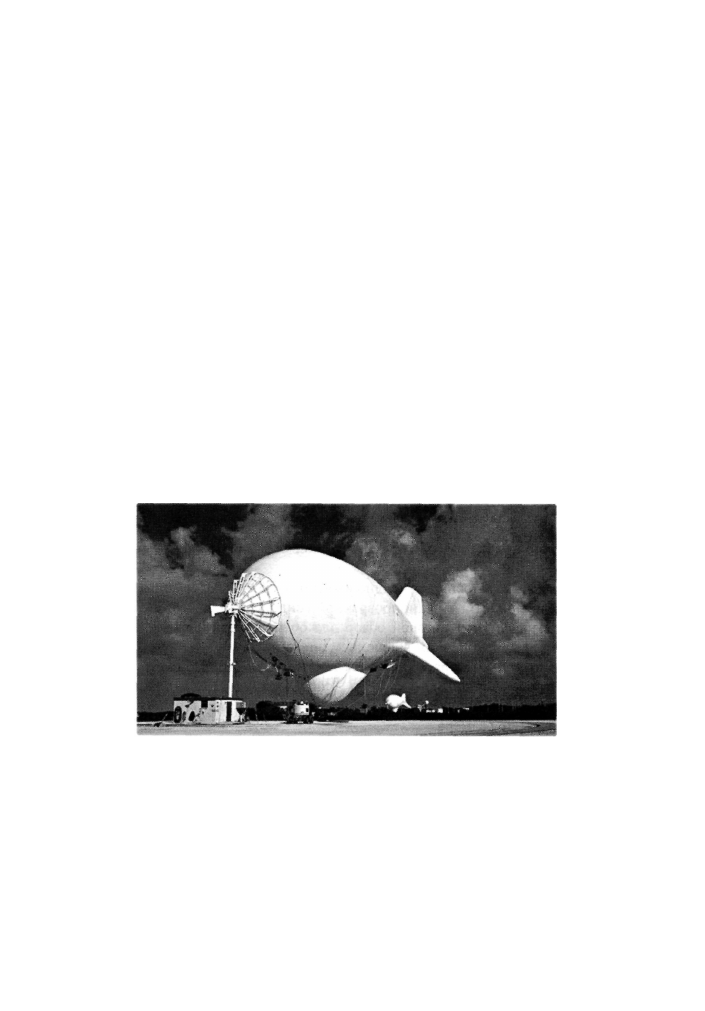
Примером использования таких комплексов служит создаваемая сеть
TARS (Tethered Aerostat Radar System - радиолокационная система на привяз
ных аэростатах) на южной границе США. Привязной аэростат 420К объемом
11340 м заполнен гелием и имеет аэродинамическую форму корпуса длиной
62,7 м и максимальным диаметром 20,7 м (рис. 7.15).
Рис. 7.15
Аэростаты поднимаются на высоты 3,0...4,5 км и опускаются при помощи
лебедки. Они могут непрерывно находиться в воздухе 5...7 дней. Электропита
ние подается по кабель-тросу. В случае неблагоприятных погодных условий
(тайфуны) аэростаты опускают и швартуют к причальной мачте. Для южных
штатов США, где расположены аэростаты, их боеготовность составляет 98%.
Полезная нагрузка на рабочей высоте составляет 480 кг.