Файл: Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2020
Просмотров: 6055
Скачиваний: 170
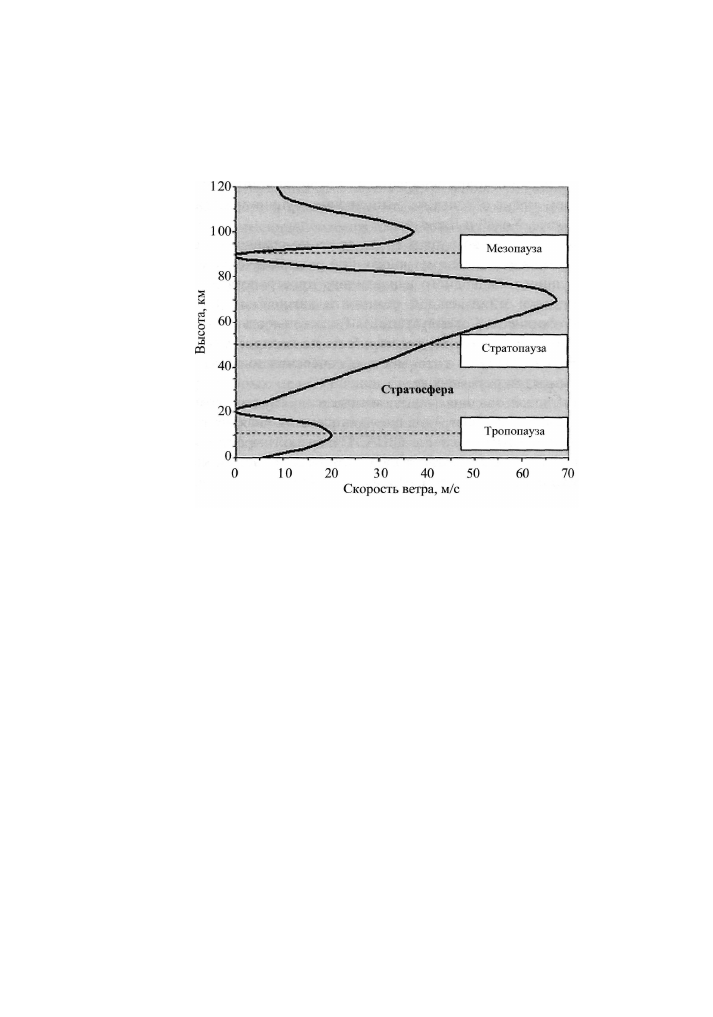
Фирма «Локхид-Мартин» разрабатывает проект аэростата, который может
подниматься на высоту 20...22 км, где практически отсутствует ветер
(рис. 7.16), что обеспечивает устойчивость положения аэростата.
Рис. 7.16
Основной проблемой в этом случае является возможность автономного
электроснабжения.
Комплекс 420К оснащен радиолокатором L-88(V)3, расположенным в
нижней части аэростата в радиопрозрачной гондоле. РЛС имеет антенну с раз
мером апертуры 8,7 м. Круговой обзор для обнаружения низколетящих целей
обеспечивается механическим вращением антенны.
Дальность зоны обзора 370 км определяется радиогоризонтом.
Рассматриваются также варианты использования РЛС L-диапазона с ан
тенной типа АФАР цилиндрической формы, размещаемой в радиопрозрачном
обтекателе того же размера.
Наряду с аэростатами рассматривается возможность использования авто
матических высотных дирижаблей для размещения информационно-разведы
вательных комплексов. По сравнению с аэростатами они обладают большей
оперативностью, автономностью, большей грузоподъемностью. Всепогодное,
круглосуточное электроснабжение при полетах на высотах 20-22 км обеспечи
вается солнечными батареями большой площади и электрогенераторами. Ком
плексы на дирижабле могут непрерывно работать в течение нескольких меся
цев и даже лет [4] (рис. 7.17). Дальность обзора низколетящих, морских и на
земных целей на таких высотах достигает 600 км.
---2008347.png)
Рис. 7.17
Радиолокаторы комплексов будут иметь антенны типа АФАР с излучате
лями, размещенными на боковой поверхности дирижабля (рис. 7.18).
Рис. 7.18
Детальное наблюдение морских и наземных целей обеспечивается в ре
жиме синтезирования апертуры при работе в Х-диапазоне, что позволяет полу
чить разрешение (детальность изображения) 1,5...15 м в зоне обзора по даль
ности 20 и 200 км. Дирижабль в этом режиме должен двигаться со скоростью
100 км/ч.
В этом режиме обеспечивается обнаружение малоразмерных наземных
целей (танков, БМП, ЗРК и т. п.). Режим селекции движущихся целей позволя-

ет выделять цели, имеющие радиальную скорость от 1,0 до 200 км/ч. В ин-
терферометрическом режиме измеряется высота рельефа местности с точно
стью 10... 15 м.
Разведывательно-информационные комплексы, размещаемые на аэроста
тах и дирижаблях, дополняют авиационные комплексы типа АВАКС и Джи-
старс, обеспечивая длительное непрерывное патрулирование в дежурном ре
жиме. Кроме РЛС комплекс содержит тепловизор, телевизионную систему,
станции РТР и радиоразведки, в том числе сотовой связи, измеритель радиа
ции. Дополнительными задачами комплекса являются метеонаблюдение и
ретрансляция.
Литература
1. Верба В. С. Тенденции развития авиационных средств разведки и дозора. - Наукоемкие тех
нологии, 2004, № 8 - 9 .
2. Верба B.C., Гандурин В.А., Трофимов А.А. Бортовая РЛС для перспективного многофункцио
нального авиационного комплекса разведки, оповещения и управления (МАК РОУ) с цифро
вой АФАР. - Наукоемкие технологии, 2004, № 8 - 9.
3. Верба B.C., Мирошничен А.В., Морозов Ю.А. Выбор варианта бортовой РЛС с АФАР для
многофункционального авиационного комплекса разведки, оповещения и управления. - Ра
диотехника, 2006, № 1.
4. Верба B.C., Гандурин В.А. Радиолокатор с синтезированной апертурой на высотном беспи
лотном дирижабле. - Антенны, 2004, № 8 - 9.
5. Верба B.C., Гандурин В.А., Меркулов В.И. Живучесть авиационных комплексов радиолокаци
онного дозора и наведения. - Информационно-измерительные и управляющие системы, 2008,
т.6, № 3.
6. Верба B.C. Актуальные вопросы создания многофункциональных радиотехнических ком
плексов нового поколения. - Наукоемкие технологии, 2006, № 7 - 8.
7. Верба B.C. Перспективы развития систем и комплексов разведки, дозора и управления авиа
ционного базирования и проблемы по обеспечению их создания. - Радиопромышленность,
2006, № 1 .
8. Верба B.C. Особенности формирования технического облика радиотехнических комплексов
многофункциональных информационно-управляющих средств воздушного базирования. -
Радиотехника, 2005, № 5.
9. Виноградов М.А. Перспективные комплексы воздушной радиолокационной разведки веду
щих зарубежных стран. - Зарубежное военное обозрение, 2007, № 2 1 .

ГЛАВА 8
ТЕНДЕНЦИИ РАЗВИТИЯ СИСТЕМ КОМАНДНОГО УПРАВЛЕНИЯ
АВИАЦИОННЫХ КОМПЛЕКСОВ РАДИОЛОКАЦИОННОГО
ДОЗОРА И НАВЕДЕНИЯ
•
8.1. Основные направления совершенствования
методов наведения
В существующих АК РЛДН [2, 34] используется ограниченный набор ме
тодов наведения, ориентированный только на наведение истребителей на не-
маневрирующие воздушные цели в дуэльной ситуации. В то же время методы
наведения, предназначенные для использования в АК РЛДН нового поколения,
должны удовлетворять существенно большему перечню разнородных и часто
противоречащих друг другу требований, отражающих необходимость наведе
ния ЛА как на одиночные, так и на групповые воздушные и наземные цели, в
том числе и сверхманевренные и гиперзвуковые, в условиях воздействия
средств РЭП противоборствующей стороны. Кроме того, необходимо прини
мать во внимание перспективу включения АК РЛДН в состав глобальной сете-
центрической информационно-управляемой системы [5] с учетом экономиче
ских и технологических факторов [13, 14].
В таких условиях использовать методы наведения, адекватно соответст
вующие каждому конкретному типу целей и конкретным условиям их примене
ния, с различным информационным обеспечением, нерационально. В то же вре
мя использование единого универсального метода наведения, одинаково пригод
ного для всех случаев, является весьма проблематичным. Наиболее рационально
использование нескольких методов наведения, каждый из которых обслуживает
достаточно большой набор целей в различных условиях их применения.
Целесообразно использование трех групп методов, один из которых обес
печивает наведение на все типы воздушных целей, включая сверхманевренные
и гиперзвуковые; второй реализует наведение самолетов на наземные объекты,
включая и подвижные и малоразмерные. Третий тип способов наведения дол
жен обеспечивать наведение средств поражения с ударных БЛА. Необходимо
отметить, что управление несколькими ЛА в варианте многопозиционного
наведения на воздушные и наземные объекты может быть получено на основе
первых двух групп методов. При этом координированное наведение несколь
ких групп ЛА с одновременным выводом на одну цель может быть получено
как частный случай многопозиционного наведения.
Следует подчеркнуть, что проблема разработки перспективных методов
наведения имеет два аспекта: управленческий и информационный.
Первый из них связан с разработкой алгоритма траекторного управления,
реализующего возможности наведения определенных типов ЛА на определен
ные типы цели в конкретных условиях.
Второй аспект связан с возможностью реализации алгоритмов оценива
ния всех фазовых координат, используемых в алгоритмах наведения, в тех же
условиях применения, в том числе и в условиях радиопротиводействия.
В общем случае методы наведения должны обеспечивать:
1) минимум времени наведения;
2) максимальную дальность действия системы командного радиоуправления;
3) минимальные мгновенные перегрузки объекта управления;
4) минимальный расход энергии управляющих сигналов; практическую
реализуемость;
5) инвариантность системы радиоуправления к условиям применения
6) сопряжение с методами самонаведения, используемыми в дальнейших
этапах наведения ВЦ.
Для выполнения первых четырех требований траектория наведения
должна быть как можно более прямолинейной. Практическая реализуемость
подразумевает возможность формирования оценок всех требуемых фазовых
координат относительного и абсолютного движения цели и ОУ при сущест
вующих измерителях, реальных объемах памяти и быстродействии бортовых
вычислителей и реальных расходах энергии на управление. Инвариантность
предусматривает возможность выполнения наведения во всем требуемом диа
пазоне дальностей, скоростей и высот независимо от условий применения. При
этом наибольшее значение имеют всеракурсность перехвата и обеспечение вы
сокой чувствительности метода к ошибкам управления как на больших, так и
на малых расстояниях при наведении и на малоподвижные и интенсивно ма
неврирующие цели.
Большое значение имеет также сопряжение методов командного наведе
ния и используемых в дальнейшем методов самонаведения, при котором обес
печивается органичный (без существенных переходных процессов) переход
авиационной системы радиоуправления наводимых ЛА от этапа дальнего к
этапу ближнего наведения. Такое сопряжение в свою очередь обеспечивается
не только методами дальнего и ближнего наведения, но и типом визирной сис
темы, используемой для поиска, обнаружения и автоматического сопровождения
целей, а также возможностями командной радиолинии управления (п. 5.5). От
метим, что наибольшую вероятность выполнения дальнего наведения обеспе-