Файл: Контрольная работа по оп. 03 Электротехника специальность среднего профессионального образования 23. 02. 06 Техническая эксплуатация подвижного состава железных дорог выполнил студент Красавина Н. В.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 78
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Схема замещения АМ с заторможенным ротором аналогична схеме замещения трансформатора, но ее параметры определяются другими коэффициентами приведения.
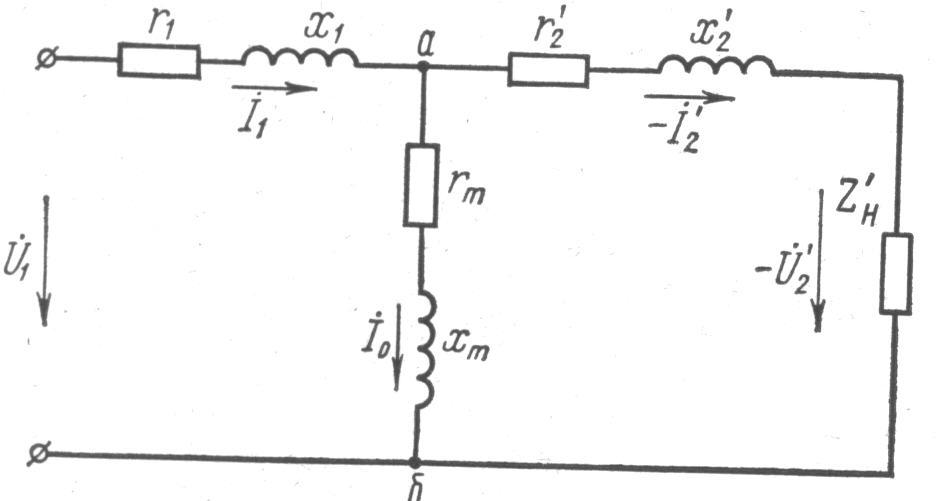
Рисунок 2.2
Из равенства электрических потерь
Из равенства относительных индукционных падений напряжений
 , находим
, находимВеличину
Теория работы АМ с заторможенным ротором подобна теории работы трансформатора, но использовать ее в качестве трансформатора невыгодно, т.к. она намного дороже и имеет худшие эксплуатационные характеристики.
Фазорегулятор: используется в схемах автоматики для компенсации фазовой погрешности; в управляемых выпрямителях; устройствах для испытаний электроизмерительных приборов.
Смысл работы заключается в том, что ротор АМ установлен в положении, при котором оси одноименных фаз ротора и статора совпадают, и вращающийся магнитный поток пересекает их одновременно, следовательно,
будет опережать
Индукционный регулятор – представляет собой поворотный автотрансформатор, его используют для регулирования трехфазного переменного напряжения, подаваемого на какое – либо устройство. Схема индукционного регулятора аналогично схеме трехфазного автотрансформатора.
3 Понятие об электродвигателе
Электроприводом называется машинное устройство, используемое для приведения в движение машины. Он состоит из электрического двигателя, передаточного механизма и пульта управления. На предприятиях общественного питания наибольшее распространение имеют двигатели, рассчитанные на напряжение 380/220 В. Это значит, что один и тот же двигатель может работать от сети переменного тока с частотой 50 Гц и с напряжением 380 или 220 В, следует только правильно соединить обмотки его статора. Соединяя их "треугольником", двигатель подключают к сети напряжением 220 В, соединяя "звездой", к сети напряжением 380 В.
Широкое применение получили универсальные приводы, которые могут поочередно приводить в движение различные устанавливаемые сменные рабочие механизмы — фаршемешалка, мясорубка, взбивалка и т.д. Применение универсальных приводов в столовых очень выгодно. Объясняется это тем, что сменные рабочие машины работают в столовых не более часа и поэтому имеют очень малый коэффициент использования. В таких случаях устанавливать электропривод к каждой машине нецелесообразно из-за увеличения ее стоимости и занимаемой площади. В настоящее время промышленность выпускает универсальные приводы 2-х видов: общего назначения, которые используются в нескольких цехах, и специального назначения, которые используются только в одном цехе, например, в мясном. К универсальным приводам общего назначения относятся и универсальные малогабаритные приводы УММ-ПР с электродвигателем переменного тока, УММ-ПС с электродвигателем постоянного тока, которые используют на транспорте (судах и вагонах-ресторанах). Все универсальные приводы имеют буквенные обозначения. Первая буква П обозначает привод, вторая — название цеха: М — мясной, X — холодный, Г — горячий, У — универсальный, для холодного цеха ПХ-0,6, для горячего цеха ПГ-0,6 и для мясного цеха ПМ-1,1. На приводы общего назначения: ПУ-0,6 и П-11
устанавливаются сменные механизмы, которые имеют буквенные обозначения: первая буква М — механизм сменный, вторая М — мясорубка, В — механизм взбивательный, О — механизм овощерезательный. Устройство и принцип работы универсальных приводов и сменных механизмов подробно рассказано в разделе "Универсальные приводы".
По количеству используемых электродвигателей электропривод бывает групповой, индивидуальный и взаимосвязанный.
В групповом приводе один электродвигатель приводит в движение с помощью разветвленной передачи группу механизмов или группу рабочих органов одного механизма. Кинематическая схема такого привода оказывается громоздкой, а сам привод неэкономичен, поэтому находит ограниченное применение.
В индивидуальном приводе электродвигатель приводит в движение только один рабочий орган.
Преимущества: кинематическая схема механизма с индивидуальным приводом существенно упрощается за счет отсутствия системы передач, повышается экономичность и снижается металлоемкость механизма. Электродвигатель может встраиваться непосредственно в механизм.
Взаимосвязанный привод представляет собой два или несколько механически или электрически связанных между собой индивидуальных электроприводов, работающих совместно на один или несколько исполнительных органов.
Заключение
В контрольной работе были рассмотрены вопросы:
1. Значение и взаимодействие электрических и магнитных цепей.
2. Асинхронные машины
3. Понятие об электроприводе.
Вывод по первому вопросу – изучены основные вопросы в области электрических и магнитных цепей.
Вывод по второму вопросу – изучено понятие асинхронные машины.
Вывод по третьему вопросу – определены понятие электропривод.
Рассмотренные вопросы помогли мне в усвоении дисциплины ОП.03Электротехника.
Список использованных источников
1. Пассажирский электровоз ЧС2т. Под ред. А.Л. Лисицына. М.»Транспорт», с.288.
2. Локомотивной бригаде об электровозе ЧС7. - М.:ИКЦ «Академкнига».2003. - 203с.
3. Единая система автоведения и управления тяговым приводом ЕСАУП. Руководство по эксплуатации. АЮВП.667433.001РЭ.
4. Иванов И.И., Лукин А.Ф., Соловьев Г.И. Электротехника. Основные положения, примеры и задачи. 2-е издание., исправленное. - СПб.: Издательство «Лань», 2002. - 192 с. Табл. 29, ил. 84, библ. 9.
5. Электротехника и электроника. Электрические и магнитные цепи. - Москва, Современный гуманитарный университет, 2000г.
1. Потапов Л.А., Юферов Ф.М. Измерение вращающихся моментов и скоростей вращения микроэлектродвигателей. - М.: Энергия, 1984.
2. Мельников В. Ю., Бородацкий Е.Г. Косвенный контроль координат асинхронного короткозамкнутого двигателя. Деп. В Казгос ИНТИ, Алматы, 1994, вып.1, 69 с.
3. Мельников В.Ю., Умурзакова А.Д. Косвенный метод контроля крутящего момента асинхронного электродвигателя// Материалы II Международной научно-практической конференции ««Наука и образование в XXI веке: динамика развития в евразийском пространстве», Павлодар, 2011.- с.65-67.
4. Предварительный Патент РК № 18934, бюл. № 11 от 15.11.2007 Способ измерения крутящегося момента асинхронного электродвигателя/ Мельников В.Ю., Умурзакова А.Д.
5. Умурзакова А.Д. Способ измерения крутящегося момента асинхронного электродвигателя на основе косвенного метода контроля координат// Материалы Международной научно- практической конференции «Индустриально- инновационное развитие на современном этапе: состояние и перспективы», Павлодар, 2009. – с.56.