Файл: Пояснительная записка Соискатель, студент группы элб16 Догадин Р. А.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 128
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Устройство и принцип работы лабораторного стенда «Интеграл»
2 Математическое описание объектов лабораторного стенда «Интеграл»
преобразователь частоты – асинхронный двигатель (ПЧ – АД)
3 Моделирование режимов работы частотно-регулируемого
электропривода в пакете программ MatLab
4 Пуск асинхронного двигателя на лабораторном стенде «Интеграл»
5 Техника безопасности при работе с лабораторным стендом «Интеграл»
электропривода
Регулирование скорости АД осуществляется изменением напряжения и частоты источника питания, работающего как в режиме источника напряжения, так и источника тока. Следовательно, скорость вращения и электромагнитный момент на валу двигателя можно регулировать путем изменения напряжения источника питания при f = const, изменения частоты и напряжения источника питания (скалярное управление частотой), изменения частоты и тока обмотки статора (скалярное частотно-токовое управление), изменение частоты и значений тока переменных асинхронного двигателя и взаимная ориентация их векторов в полярной или декартовой системе координат (векторное управление).
Принцип скалярного управления частотно-управляемым асинхронным электроприводом основан на изменении частотных и токовых значений модулей переменных асинхронного двигателя (напряжения, магнитные потоки, проточные муфты и токи цепей двигателя). Системы с обратной связью по току статора и скорости вращения нашли наибольшее применение.
Математическое описание данной модели рассматривается в главе 2.2.
Сама модель представлена на рисунке 3.8.
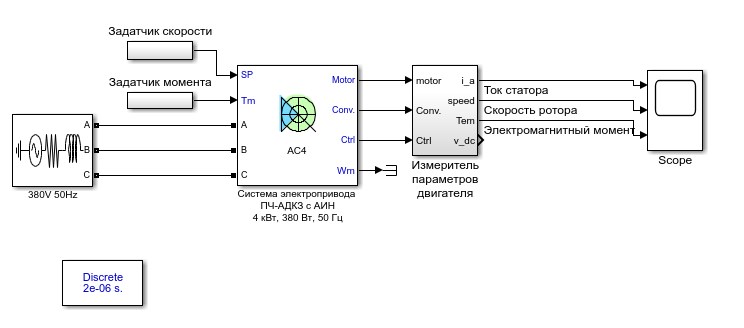
Рисунок 3.8 – Структура модели асинхронного двигателя с преобразователем частоты и автономным инвертором напряжения
При моделировании режимов работы электродвигателя необходимо ввести рассчитанные заранее параметры в соответствующие строки окна задания параметров электродвигателя, изображенного на рисунке 3.9.
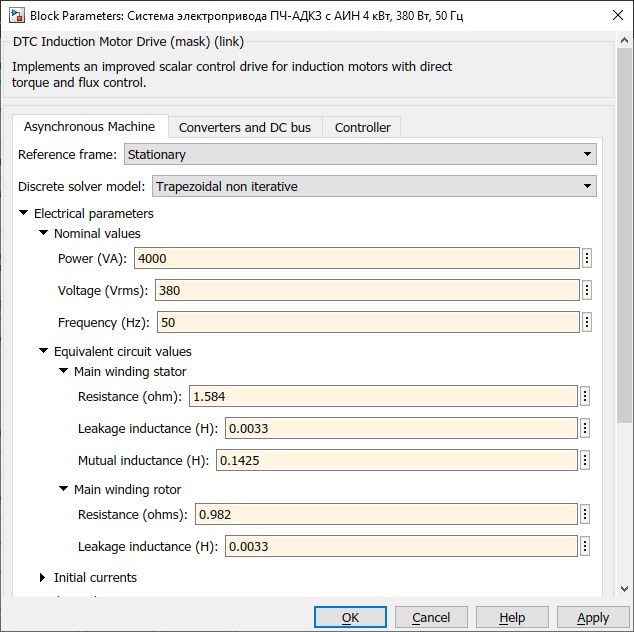
Рисунок 3.9 – Окно задания параметров двигателя
После этого рассмотрим состав модели системы электропривода с описанием примененных блоков, которая представлена на рисунке 3.10.
Сама система состоит из регулятора скорости, неуправляемого выпрямителя, преобразователя, инвертора напряжения и измерителя параметров, регулятора тока и самого асинхронного двигателя. Рассмотрим блоки, входящие в состав блок-схемы асинхронного двигателя: Source – установщик значений двигателя; Speed Controller
- блок регулятора скорости двигателя; F.O.C. – диспетчер, который производит выборку времени; Braking Chopper - блок, который выполняет динамическое торможение. Блок для установки момента сопротивления на валу двигателя представлен в функции времени через блок «Torque reference» библиотеки SimPowerSystems, который позволяет изменять момент сопротивления на валу двигателя.
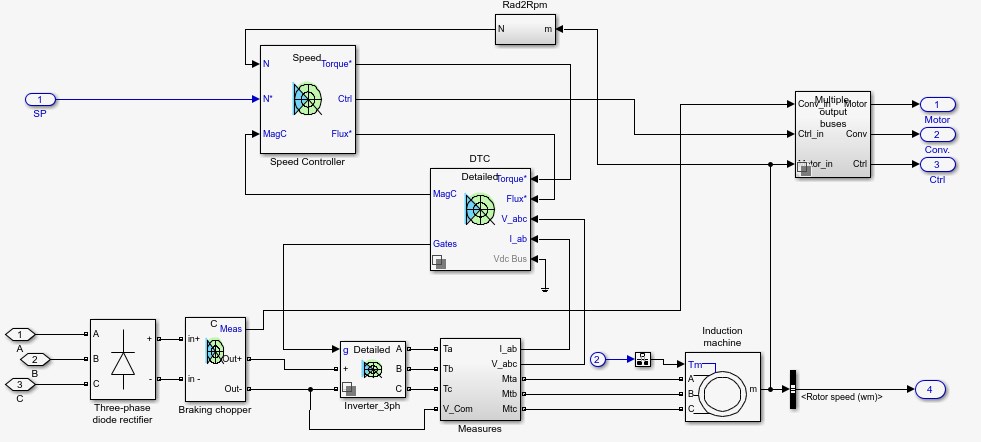
Рисунок 3.10 – Состав блока системы электропривода ПЧ-АД с АИН Перейдем к получению результатов моделирования.
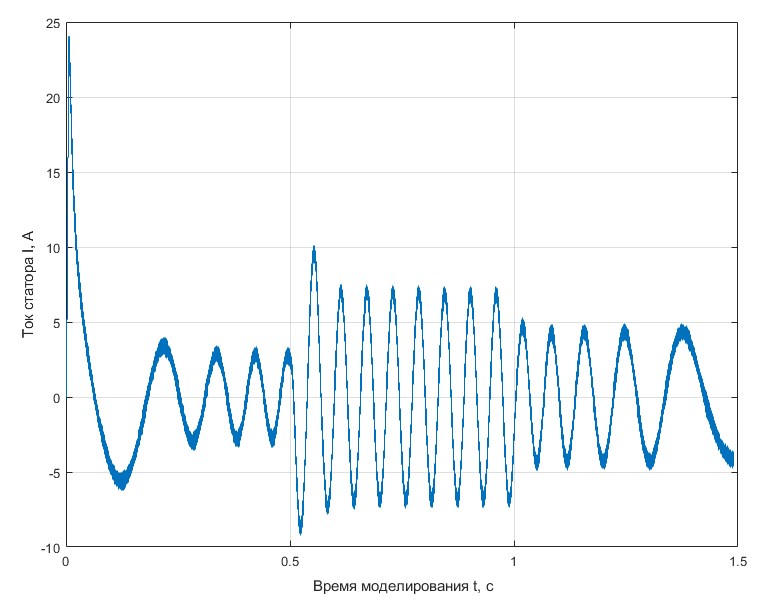
Рисунок 3.11 – График тока статора электродвигателя
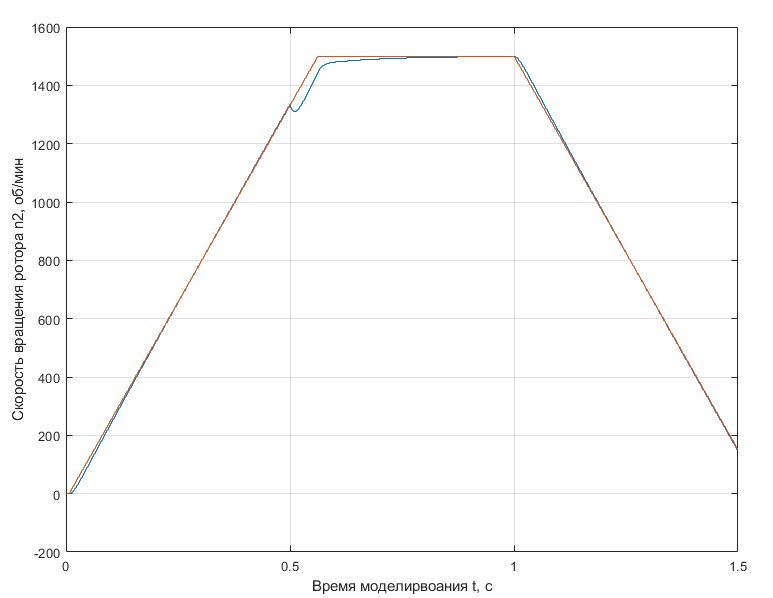
Рисунок 3.12 – График скорости вращения ротора
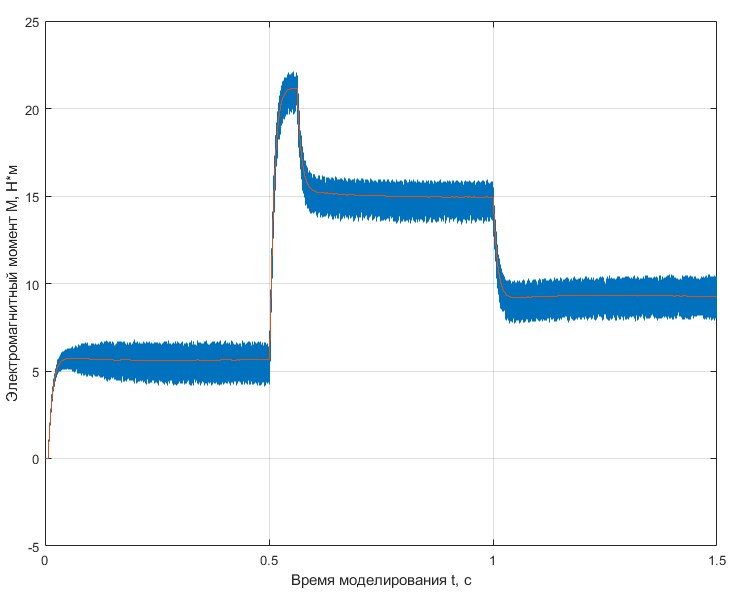
Рисунок 3.13 – График момента на валу двигателя
На рисунке 3.11 изображен ток статора электродвигателя во время пуска, работы на номинальной скорости и торможении. Пусковой ток при данной системе электропривода по сравнению с прямом пуском снизился почти в 3 раза и составил 24,15 А. Соответственно, кратность пускового тока к номинальному равна 2,81 (в то время, как по паспортным данным допускается 6). Это снижение пускового тока благоприятно отразится на работе оборудования и уменьшит затраты на потребление электроэнергии.
На рисунке 3.12 изображен график скорости вращения ротора двигателя, по которому можно сделать следующие выводы: ко времени 0,5 с после пуска электродвигателя скорость вращения ротора достигает установившегося значения, как при прямом пуске, но при этом отсутствует колебательный процесс, что в реальной жизни означает уменьшение или отсутствие вибраций. После этого на моменте времени 1 с начинается процесс торможения электродвигателя, после чего скорость двигателя уходит в ноль к моменту времени 1,6 с.
На рисунке 3.13 изображен график момента, который показывает, что использование системы управления ПЧ-АД с АИН позволило сократить момент двигателя на 18% с 26,82 Н∙м до 22,15 Н∙м. Это позволит прилагать меньше усилий электроприводу для вращения механизма и соответственно потреблять меньше электроэнергии из сети.
Механические характеристики при частотном регулировании скорости вращения ротора асинхронного двигателя ниже номинальной представлены на рисунке 3.14.
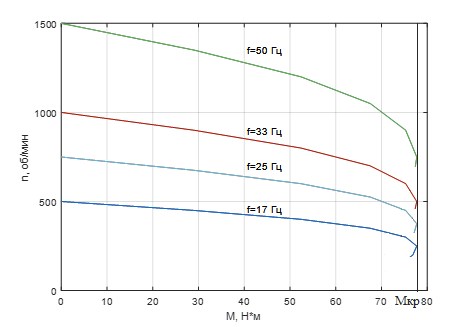
Рисунок 3.14 – Механические характеристики при частотном регулировании скорости вращения ротора АД
Вывод: в результате моделирования было выявлено преимущество применения преобразователя частоты с автономным инвертором напряжения для пуска, установившегося режима работы и торможения асинхронного двигателя. При этом наблюдается уменьшение пускового тока, рабочего момента, вибраций при разгоне двигателя, что существенно влияет на его срок службы и потреблении электроэнергии.
После рассмотрения моделей в пакете программ MatLab перейдем к работе с самим стендом «Интеграл».
4 Пуск асинхронного двигателя на лабораторном стенде «Интеграл»
В данной главе рассматриваются режимы работы лабораторного стенда «Интеграл».
Для этого запускается сам лабораторный стенд и программа FR-Configurator на персональном компьютере стенда.
В программе проводится инициализация асинхронного двигателя, настройка параметров стенда, а также выбираются выходные величины, зависимости от времени которых будут построены в виде графиков.
После настройки стенда существует несколько способов реализации режимов работы системы электропривода. Самым удобным является запуск электродвигателя через программное обеспечение FR-Configurator. Для этого в программе присутствует задатчик частоты, на которую будет выходить электродвигатель, и кнопка «Start», приводящая электропривод в движение.
Во время работы стенда, в программе FR-Configurator строятся необходимые графики выходных параметров. В данном случае нас интересуют разгонная характеристика, график электромагнитного момента на валу двигателя и график тока статора. Также присутствует сводная таблица выходных параметров (выходная мощность, выходной ток, скорость вращения ротора, момент на валу двигателя и т.д.), которая также позволяет более подробно произвести анализ режимов работы частотно-регулируемого электропривода.
Результатами проведенной работы являются графики разгонных характеристик, токов статора и моментов на валу электродвигателя при изменении частоты питающего напряжения, близкие к расчетным.
При понижении частоты питающего напряжения электродвигатель развивает меньшую скорость, имеет меньшие пусковые токи и моменты, что благоприятно влияет на сеть электроснабжения. После пуска двигателя имеется возможность двузонного регулирования, то есть повышения и понижения частоты питающего напряжения относительного номинальной частоты электродвигателя 50 Гц.
При изменении частоты также изменяется и напряжение, подводимое к выводам обмоток статора, это видно из выражения 4.1:
????1 ≈ ????1 = 4,44 ∙ Ф ∙ ????1 ∙ ????1 ∙ ????об.(4.1)
Следовательно, вместе с подводимым напряжением к выводам обмоток статора, также изменяется ток статора, а, значит, изменяется и потребляемая двигателем мощность. То есть при пуске двигателя на частоте, меньше номинальной, наблюдается уменьшение переменных потерь мощности электродвигателя.
Также при запуске электродвигателя с помощью полупроводникового преобразователя частоты уменьшаются вибрации, производимые двигателем, в следствие уменьшения скорости вращения и момента на валу, что увеличивает срок службы оборудования.
Уменьшение пусковых токов электродвигателя позволяет осуществлять запуск одновременно нескольких систем электроприводов без просадок сети электроснабжения.
5 Техника безопасности при работе с лабораторным стендом «Интеграл»
В данной главе рассматриваются инструкции по безопасности, которые необходимо соблюдать при монтаже, эксплуатации и обслуживании лабораторного стенда «Интеграл».
При несоблюдении данных инструкций, манипуляции, производимые со стендом, могут привести к травмах или к смерти, а также к повреждению полупроводникового преобразователя частоты, асинхронного электродвигателя и приводного оборудования.
Все работы по монтажу и технологическому обслуживанию лабораторного стенда должны производиться квалифицированным персоналом, имеющим 3 группу допуска по электробезопасности.
Прикосновение к токоведущим элементам стенда может привести к смертельному исходу, даже если оборудование отключено от сети. При работе с токоведущими частями убедитесь, что отключены входы напряжения: как сетевого питания, так и любые другие, отсоединен кабель электродвигателя.
Перед началом электромонтажа или других работ с преобразователем частоты необходимо отключить напряжение питания и подождать не менее 10 минут. Это время необходимо для того, чтобы после отключения напряжения питания конденсаторы успели разрядиться до безопасного уровня напряжения.
Длина проводки не должна превышать 500 м, а при векторном управлении нельзя превышать длину 100 м.
Преобразователь частоты и двигатель должны быть заземлены надлежащим образом. Запрещается использовать нулевой провод в качестве заземления.
Кнопка отключения на пульте оператора не выполняет функции защитного выключателя. Она не отключает преобразователь стенд от сети и не гарантирует пропадание напряжения между преобразователем и двигателем.
Не используйте для запуска и останова преобразователя силовые контакторы – всегда используйте для того пусковые сигналы STF и STR.
Перед началом работ должны быть проведен инструктаж с правилами техники безопасности при работе с электрическим током и правилами оказания первой помощи при поражении электрическим током.
Заключение
Согласно техническому заданию ВКР (выпускной квалификационной работы) было произведено моделирование режимов работы частотно-
регулируемого электропривода в среде Simulink. А также была проведена работа на лабораторном стенде «Интеграл», состоящем из полупроводникового преобразователя частоты Mitsubishi FR-A741, асинхронного двигателя ELDIN A100F4БУЗ и персонального компьютера. В результате работы было выявлено преимущество применения преобразователя частоты в асинхронном электроприводе. Для подтверждения результатов проведенной работы были смоделированы прямой пуск рассматриваемого электродвигателя и пуск электродвигателя с применением преобразователя частоты. Перед моделированием режимов работы частотно-регулируемого электропривода был произведен расчет необходимых параметров электродвигателя ELDIN A100F4БУЗ.
Можно утверждать, что данный метод анализа целесообразности применения преобразователей частоты в различных асинхронных электроприводах насосных станций, лифтовых и подъемных установок и т.д. позволяет качественно дать оценку необходимости применения частотнорегулируемого электропривода с целью снижения потребляемой электроэнергии и увеличения срока службы оборудования и механизмов электропривода.
В разделе, посвященном технике безопасности при работе с лабораторным стендом «Интеграл», были описаны требования к монтажу, технологическому обслуживанию и эксплуатации данного стенда.