Файл: Пояснительная записка Соискатель, студент группы элб16 Догадин Р. А.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 129
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Устройство и принцип работы лабораторного стенда «Интеграл»
2 Математическое описание объектов лабораторного стенда «Интеграл»
преобразователь частоты – асинхронный двигатель (ПЧ – АД)
3 Моделирование режимов работы частотно-регулируемого
электропривода в пакете программ MatLab
4 Пуск асинхронного двигателя на лабораторном стенде «Интеграл»
5 Техника безопасности при работе с лабораторным стендом «Интеграл»
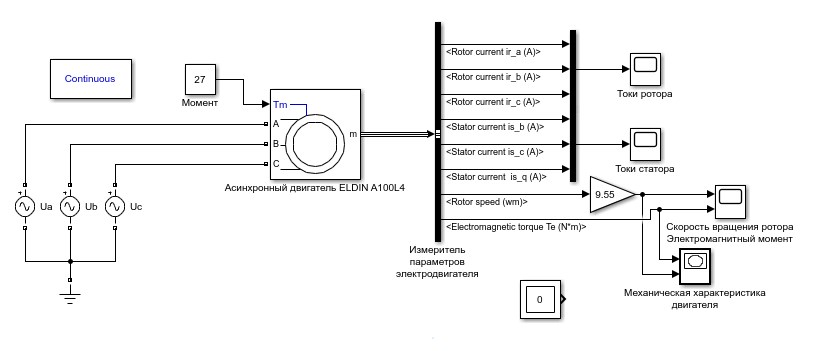
Рисунок 3.1 – Модель прямого пуска асинхронного двигателя
ELDIN A100L4FБУЗ
В качестве источников переменного напряжения, соединенных по схеме «звезда», использованы блоки «AC Voltage Source», в которых задается значение напряжения, фаза и частота.
Асинхронный двигатель ELDIN A100L4FБУЗ представлен в виде блока «Asynchronous Machine SI Units». В данном блоке выбирается тип ротора
(фазный, «беличья клетка», двойная «беличья клетка»), задаются параметры электродвигателя (номинальная мощность, номинальное напряжение, частота питающей сети), схемы замещения электродвигателя (сопротивления обмоток статора и ротора, индуктивности в цепи статора и ротора и др.).
Процессы, происходящие при моделировании описаны в главе 2.1.
Для измерения параметров электродвигателя используется блок «Bus Selector», который позволяет отслеживать параметры цепи ротора и статора, а также частоту вращения ротора и электромагнитный момент.
Для того, чтобы отобразить токи ротора и токи статора, соответственно, на одном осциллографе, соответствующие выводы измерителя параметров электродвигателя подключаются к блоку «Mux», после чего вывод данного блока подключается к осциллографу, для отображения которого используется блок «Scope».
Перед моделированием необходимо определить параметры схемы замещения асинхронного электродвигателя ELDIN A100L4FБУЗ, паспортные данные которого представлены в таблице 3.1.
Таблица 3.1 – Паспортные данные электродвигателя ELDIN A100L4FБУЗ
| Pн, кВт | n2, об/мин | η, % | cos φ | Iн, А | ????пуск ???????? =  ????н | ????пуск ????п =  ????н | ????макс ????макс =  ????н ????н | J, кГ∙м2 |
| 4,0 | 1425 | 84,7 | 0,83 | 8,6 | 6,0 | 2,3 | 2,9 | 0,0101 |
Исходя из исходных данных определяем:
-
Скорость вращения магнитного поля (синхронная скорость вращения):
60 ∙ ???????? (3.1)
????1 =
 ;
; ????
60 ∙ 50 об
 ;
; мин
-
Величину номинального скольжения:
???? = ????
 1 − ????2 ; (3.2)
1 − ????2 ; (3.2) ????1
????н =
-
Номинальную угловую скорость вращения ротора:
????н = ???? ∙ ????2 ;(3.3)
3,14 ∙ 1425 рад
 ;
; с 4) Угловую скорость вращения магнитного поля:
2 ∙ ???? ∙ ????с (3.4)
????н =
 ;
; ????
2 ∙ 3,14 ∙ 50 рад
????н =
 = 157 ;
= 157 ; 2 с
-
Номинальный момент:
????н (3.5)
????н =
 ;
; ????н
????н
-
Пусковой момент:
????пуск = ????п ∙ ????н; (3.6)
????пуск = 2,3 ∙ 26,82 = 61,69 Н ∙ м; 7) Максимальный момент:
????макс = ????макс ∙ ????н; (3.7)
????макс = 2,9 ∙ 26,82 = 77,78 Н ∙ м;
-
Критическое скольжение:
????кр = ????н ∙ (????макс
????кр
Примем механические потери ∆????мех равными 0,035????н, тогда ∆????мех = 140 Вт.
-
Приведенное активное сопротивление обмотки ротора:
1 (????н + ∆????мех) (3.9)
 ???????? = 3 ∙ ????н2 ∙ 1 −????н????н ;
???????? = 3 ∙ ????н2 ∙ 1 −????н????н ; ????????
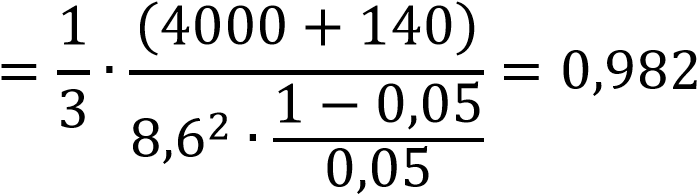
Ом;
Потери мощности в активном сопротивлении статорной обмотки, без учета потерь в ферромагнитном сердечнике и добавочных потерь в машине, определяются выражением:
3 (3.10)
∆????эл1
∆????эл1
− 140 = 351,635 Вт.
где С – коэффициент приведения, который принимается равным 1,01-1,05 (меньшие значения для машин большей мощности).
Суммарные потери в двигателе в номинальном режиме рассчитываются по формуле:
1 − ????ном (3.11)
∆????∑ном = ????ном ∙ (
 ) ;
) ; ????ном
Далее найдем величину активного сопротивления статора:
????
???????? = н ∙ ???????????????? ∙ (1 − ????) − ????2 ∙ ???????? − ∆
 3????∙мех????н2 ; (3.12)
3????∙мех????н2 ; (3.12) 
√3 ∙ ????н
????????
-
Приведенная индуктивность рассеяния ротора:
????н (3.13)

???????????? = ???????????? = √3 ∙ 4 ∙ ???? ∙ ???????? ∙ (1 + ????2) ∙ ???????? ∙ ????н ;
???????????? = ????????????
-
Индуктивность статора:
????н (3.14)
???????? =;
 с н
с нс н 3 ???? ∙ ????н ????кр
????????

= 0,1458 Гн.
-
Индуктивность контура:
???????? = ???????? − ????????????; (3.15)
???????? = 0,1458 − 0,0033 = 0,1425 Гн;
Определяем коэффициент приведения C1 после расчета параметров по формуле:
???????????? (3.16)
????1 = 1 +
 ;
; ????????
????1 = 1 +
Полученное значение необходимо сравнить с принятым коэффициентом C и при необходимости повторить расчет параметров. В нашем случае они равны.
После расчета требуемых параметров, добавляем их в окно блока «
Asynchronous Machine SI Units», изображенное на рисунке 3.2.
Промоделировав, снимаем показатели тока статора и ротора двигателя и скорости вращения. Сравниваем рассчитанные параметры с результатами моделирования и делаем соответствующие выводы.
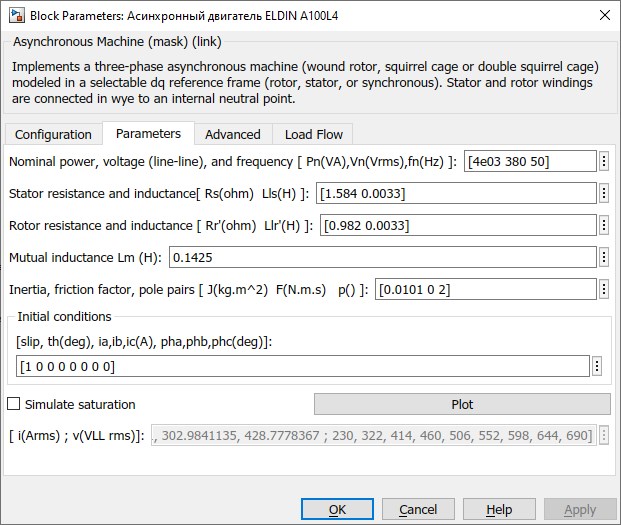
Рисунок 3.2 – Окно параметров блока «Asynchronous Machine SI Units»
Результатом моделирования являются графики зависимостей токов статора и ротора от времени соответственно и разгонная характеристика, представленные на рисунках 3.3 – 3.5.
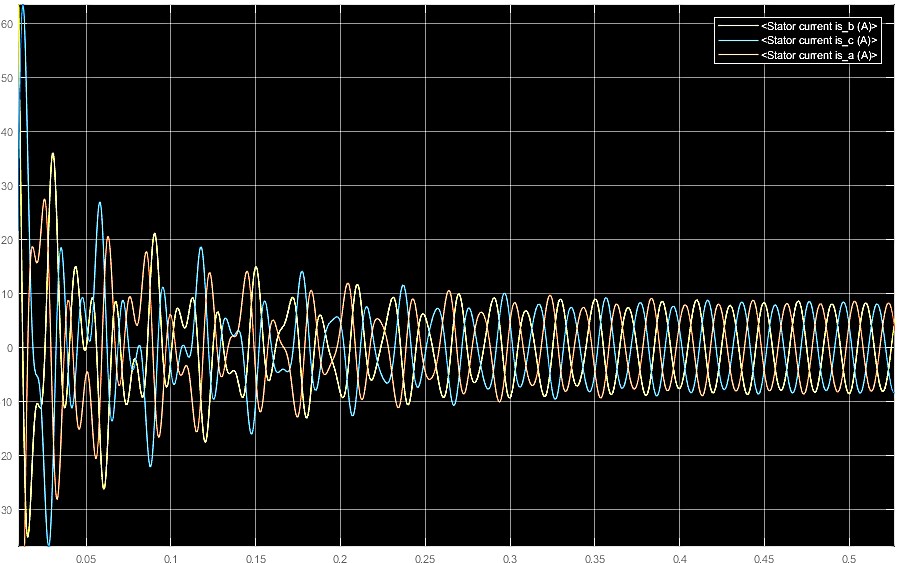
Рисунок 3.3 – Зависимость токов статора от времени
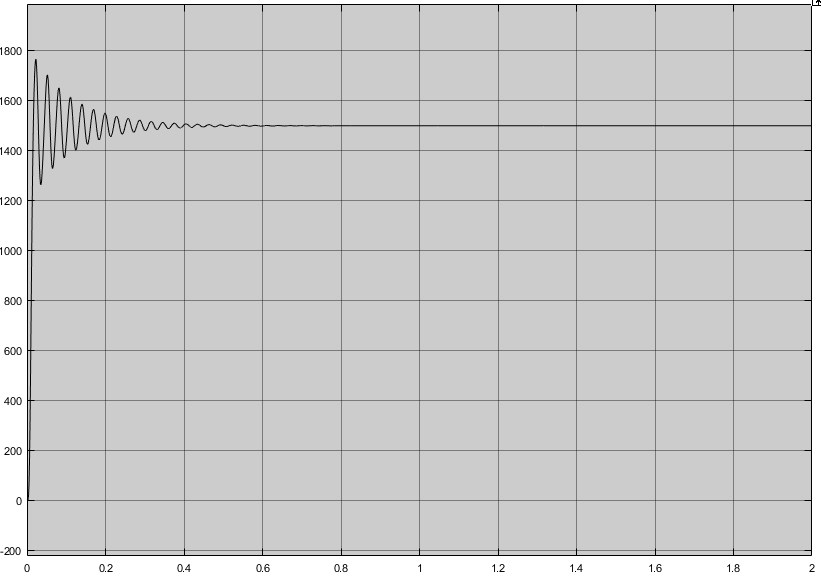
Рисунок 3.4 – Разгонная характеристика
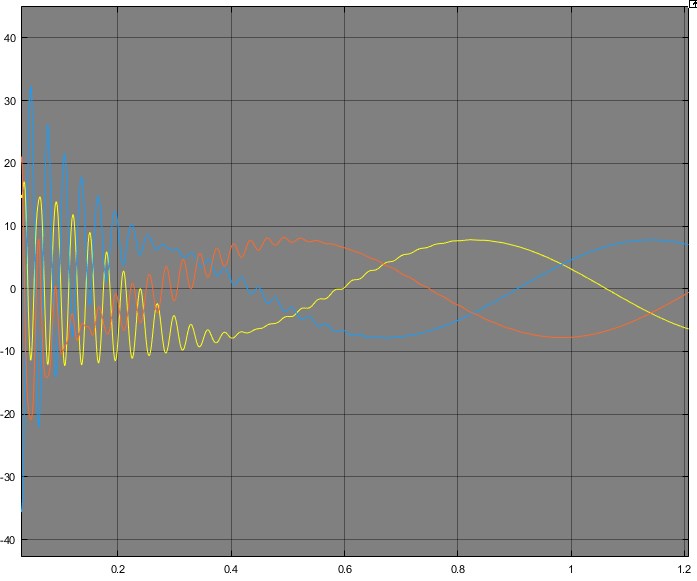
Рисунок 3.5 – Зависимость токов ротора от времени
На рисунках 3.3 и 3.5 показано значение тока статора и ротора при заданных параметрах двигателя. Данные значения имеют следующие характеристики: в момент пуска двигателя пусковой ток принимает значение 63,55 А, после чего снижается до 8,6 А, при этом кратность пускового тока к номинальному превышает указанное в паспорте значение и составляет 7,4, вместо 6. Такое превышение существенно повысит потребление электроэнергии и уменьшит срок службы двигателя.
Рисунок 3.4 показывает разгонную характеристику двигателя в зависимости от времени моделирования. Из рисунка 3.4 видно, что время переходного процесса моделирования не превышает 0,5 с. После момента времени 0,5 с двигатель разгоняется до номинальной скорости 1425 об/мин. При пуске двигателя присутствуют колебания скорости, в действительности они привели бы к вибрации оборудования и также уменьшило бы срок его службы.
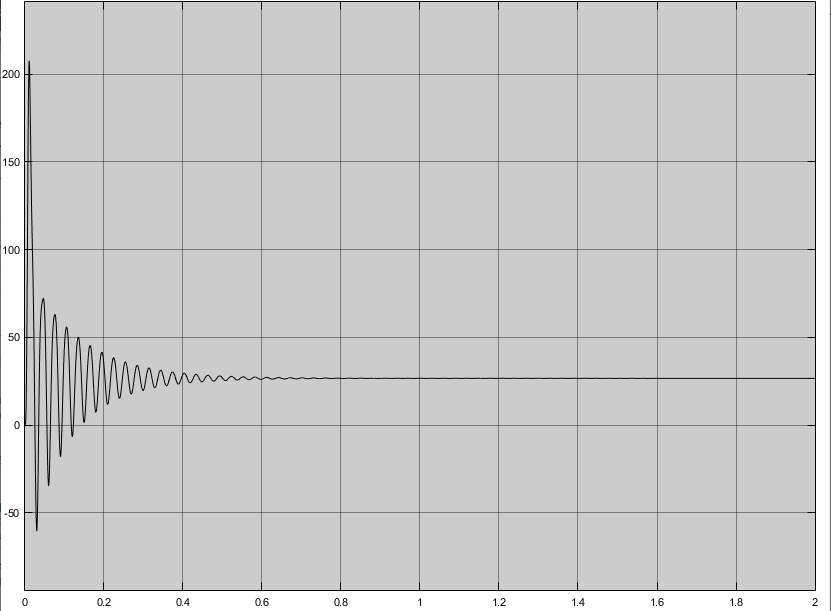
Рисунок 3.6 – График электромагнитного момента на валу двигателя при прямом пуске
Рисунок 3.6 отображает зависимость электромагнитного момента на валу двигателя от времени моделирования. При запуске двигателя его пусковой момент составляет 210 Н∙м, что превышает допустимое значение 61,69 Н∙м.
Рабочее (номинальное) значение электромагнитного момента равно расчетному и составляет 26,68 Н∙м.
Естественная механическая характеристика асинхронного двигателя ELDIN A100L4FБУЗ представлена на рисунке 3.7.
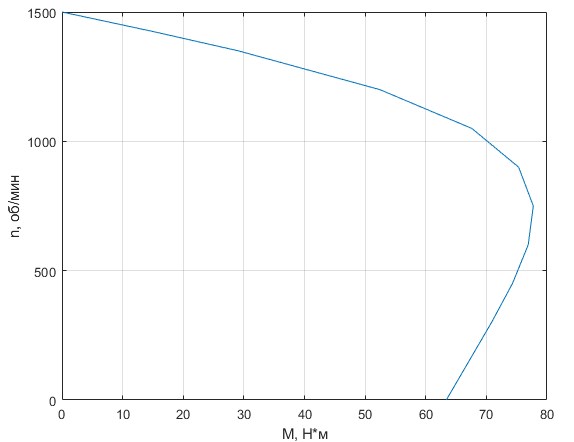
Рисунок 3.7 – Механическая характеристика ELDIN A100L4FБУЗ
Вывод: прямой пуск не вполне подходит для данного электродвигателя. При повышенном пусковом токе и электромагнитном моменте данная система электропривода будет потреблять гораздо больше электрической энергии из сети и быстрее выйдет из строя.
После моделирования прямого пуска асинхронного двигателя ELDIN A100L4FБУЗ, рассмотрим модель асинхронного электродвигателя с полупроводниковым преобразователем частоты и автономным инвертором напряжения (ПЧ-АД с АИН). Реализация разработанной математической модели, также как и прямой пуск, осуществляется с помощью пакета программ MatLab (приложение Simulink и SimPowerSystems).