Файл: Системы управления асинхронным двигателем на основе.docx
Добавлен: 08.11.2023
Просмотров: 282
Скачиваний: 16
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ и ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ГРОЗНЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ имени академикаМ.Д. МИЛЛИОНЩИКОВА
Институт энергетики
Кафедра «Электротехника и электропривод»

АО «Чеченэнерго»
(место прохождения практики)
ОТЧЕТ
по производственной практике на тему:
Системы управления асинхронным двигателем на основе
микропроцессорного преобразователя частоты. студента(ки) __ Мициев М.С.______ группы ____АНП-18____________
начало практики __11.05.2022г.____ окончание практики _____24.05.2022г.___
Руководитель
от профильной
организации _начальник ПТС ________________________ Мазаев А.Х-М__
(должность) (подпись, дата, оценка) (ФИО)
Руководитель
от ГГНТУ__ст.преподаватель кафедры ЭЭП __________ _Мальцагов Р.И.
(должность) (подпись, дата, оценка) (ФИО)
Грозный – 2022г.
Индивидуальное задание
на ______ преддипломную практику_______________ практику
(наименование практики)
Студент Мициев Майрбек Саламбекович____________________
(ФИО)
Сроки прохождения практики__________11.05.2022г.-24.05.2022г.__________
Место прохождения практики_________АО «Чеченэнерго»_______________
Задание:
-
Системы управления асинхронным двигателем на основе микропроцессорного преобразователя частоты
Руководитель от ГГНТУ _________________Мальцагов Р.И.__________
(ФИО подпись)
Руководитель от
профильной организации_________________ Мазаев А.Х-М._____________
(ФИО подпись)
СОДЕРЖАНИЕ
ВВЕДЕНИЕ............................................................................................................10
1.1. Анализ существующих средств автоматизации.................................................4
1.2. Обоснование системы автоматического управления........................................5
1.3. Обзор существующих схем управления........................................................17
1.4. Структурная схема станции автоматического управления питательными насосами.................................................................................................................15
1.5. Основные технические требования к станции автоматического управления.............................................................................................................17
ЗАКЛЮЧЕНИЕ .....................................................................................................19
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ ………………………….…20
ВВЕДЕНИЕ
Актуальность работы определяется использованием промышленными предприятиями энергоемких электрических аппаратов, в том числе электродвигателей, для которых затраты на электроэнергию являются основополагающими. Электродвигатели переменного тока, в частности асинхронные двигатели (АД), находят очень широкое применение ввиду их простоты и надежности. Высокие эксплуатационные показатели АД предъявляют аналогичные требования к системам автоматического управления ими. Однако в настоящее время эти системы не отвечают указанным требованиям, сложны и громоздки и снижают достоинства АД. Оптимизация процесса управления позволяет экономить до 17% потребляемой электроэнергии за счет снижения потерь в АД. Самый прогрессивный способ управления - частотный - требует применения специальных тиристорных преобразователей частоты, стоимость которых в 510 раз больше, а надежность - на порядок ниже, чем самого АД, из-за большого числа коммутирующих силовых элементов. Таким образом, разработка метода проектирования системы частотного управления АД с функциями регулирования, реализованными на информационном уровне, универсальной силовой частью и согласованными с ними аппаратными, программными и метрологическими средствами, является актуальной задачей.
Идея работы заключается в разработке метода проектирования системы частотного управления асинхронным двигателем с широтно-импульсным регулированием, путем формирования многоступенчатого напряжения на статоре, учитывающего технологические особенности работы асинхронного двигателя.
1.1. Анализ существующих средств автоматизации
Известные в настоящее время технические устройства для частотного управления асинхронным электроприводом в полной мере не отвечают требованиям, предъявляемым к мощному высоковольтному электроприводу и им присущи следующие недостатки:
ограниченная низкоскоростными электроприводами область применения, необходимость изготовления специальной машины или переделка серийной, применение специальных устройств для механического сочленения валов, невозможность применения в запыленных и агрессивных средах, что обусловлено наличием датчиков на валу и внутри машины;
высокая сложность технической реализации, обусловленная наличием сложных технических устройств: координатного преобразования, векторных фильтров, фазовращателей, функциональных преобразователей, блоков коррекции мгновенного значения частоты;
наличие большого числа датчиков, осуществляющих высоковольтную гальваническую развязку;
невысокая надежность, что обусловлено наличием датчиков на валу и внутри машины, высокой сложностью технической реализации блоков АСР, датчиков, осуществляющих высоковольтную гальваническую развязку.
-
Обоснование системы автоматического управления
При частотном управлении асинхронными двигателями наиболее часто используются следующие законы: поддержание постоянства потокосцепления статора (Y1=const), поддержание постоянства главного потока машины (Y0=const), поддержание постоянства потокосцепления ротора (Y2=const), и регулирование величины потокосцепления в зависимости от величины нагрузочного момента (Y1, Y0, Y2) =f(M))
Первый закон реализуется при поддержании постоянного отношения ЭДС статора к угловой частоте поля. Основным недостатком такого закона является пониженная перегрузочная способность двигателя при работе на высоких частотах, что обусловлено увеличением индуктивного сопротивления статора и, следовательно, снижением потокосцепления в воздушном зазоре между статором и ротором при увеличении нагрузки.
Поддержание постоянства главного потока повышает перегрузочную способность двигателя, но усложняет аппаратную реализацию системы управления и требует либо изменений конструкции машины, либо наличия специальных датчиков.
При поддержании постоянного потокосцепления ротора, момент двигателя не имеет максимума, однако при увеличении нагрузки увеличивается главный магнитный поток, приводящий к насыщению магнитных цепей и, следовательно, к невозможности поддержания постоянства потокосцепления ротора.
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
На практике группа законов с постоянством магнитного потока получила распространение для динамичных электроприводов, работающих с постоянным моментом сопротивления на валу и с частыми ударными приложениями нагрузки. В то время как группа законов с регулированием магнитного потока в функции нагрузки на валу применяется для низкодинамичных электроприводов и для приводов с “вентиляторной” нагрузкой.
В то же время существует ряд приводов таких механизмов как насосы, компрессоры, конвейеры и т. д., которые занимают промежуточное положение между динамичными и низкодинамичными, и для которых существующие системы не в полной мере удовлетворяют предъявляемым к этим приводам требованиям. Высокодинамичные привода имеют сложную систему управления и повышенные энергетические потери при недогрузе двигателей, а низкодинамичные привода не всегда способны отработать быстрые изменения статического момента.
На основании вышесказанного можно сделать вывод, что существующие системы не в полной мере отвечают требованиям, предъявляемым к электроприводам c асинхронными двигателями.
Учитывая, что в настоящее время большинство приводов таких механизмов как вентиляторы, насосы, компрессоры и т. д. имеют нерегулируемый привод, актуальной является задача выбора системы управления. Причем система управления должна обеспечивать достаточно высокое быстродействие, надежность и высокие энергетические характеристики привода.
Как уже было отмечено, высокими энергетическими характеристиками обладают системы с регулированием магнитного потока в функции нагрузки. Увеличить их динамические характеристики можно путем форсировки статорного напряжения (тока) во время переходных процессов и частых формирований управляющих воздействий. Получить высокую надежность можно за счет применения упрощенной системы регулирования, отказа от встроенных в двигатель и механически связанных с ротором датчиков.
1.3. Типовые схемы управления ад с короткозамкнутым ротором
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 1.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители FА) и перегрузки (тепловые реле КК).
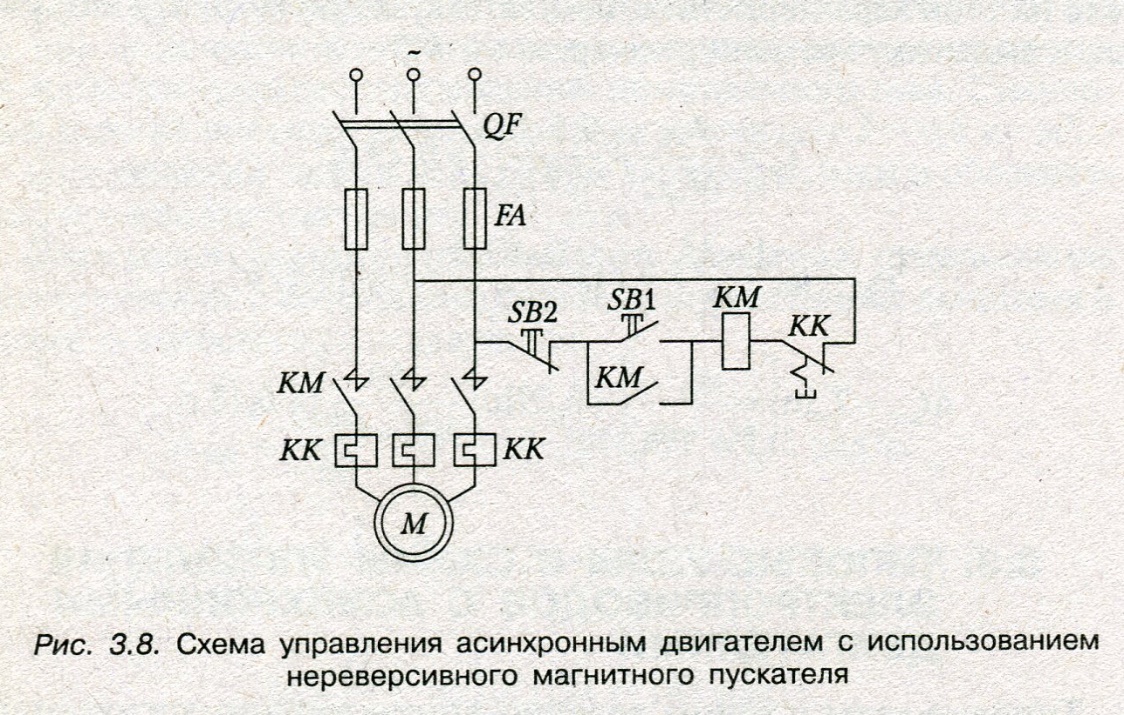
Рис. 1.1. Схема управления АД с использованием
нереверсивного магнитного пускателя
Для пуска двигателя замыкают выключатель QF и нажимают кнопку пуска SВ1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SВ1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
Реверсивная схема управления ад.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК (рис. 1.2). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
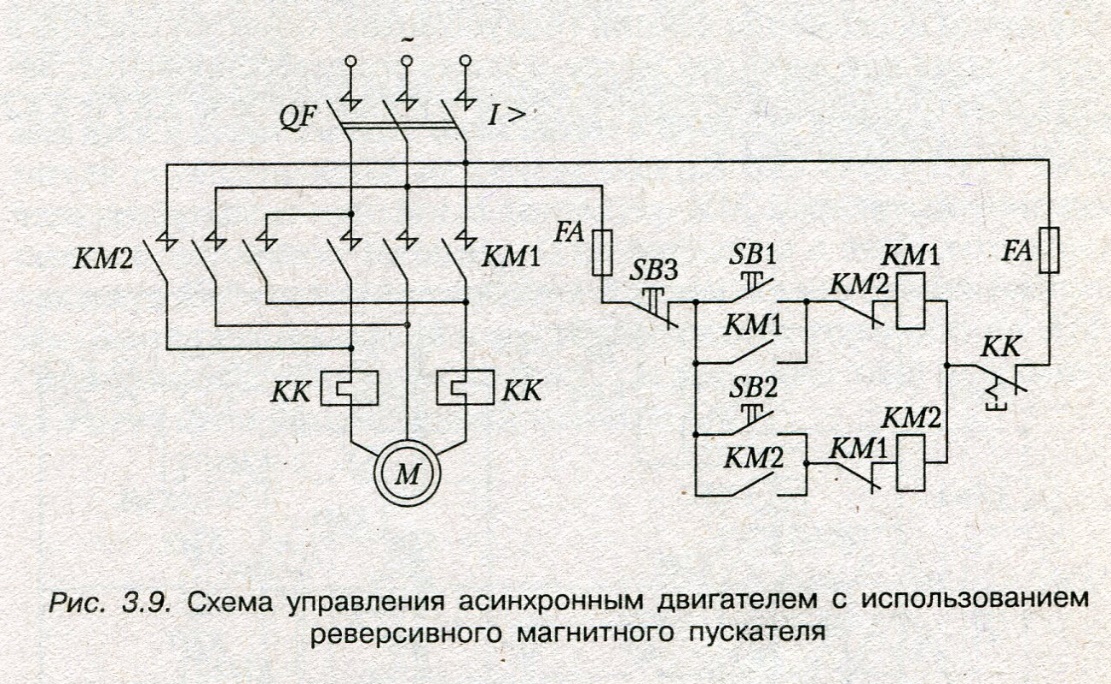
Рис. 1.2. Схема управления АД с использованием реверсивного магнитного пускателя
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FА). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1 и КМ2).
Пуск двигателя при включенном QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SВ1 или SВ2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.