ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 19
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
18 ВОПРОС
Кинематический анализ зубчатых механизмов
Целью кинематического анализа является определение угловых скоростей звеньев и передаточных отношений.
Передаточное отношение между звеньями a и b определяется как отношение их угловых скоростей (или частот вращения):
Угловые скорости и частоты вращения связаны соотношениями
Очевидно, что перестановка индексов у величины
Если оси вращения звеньев a и b параллельны, то передаточному отношению
любое из двух возможных направлений вращения принимают за положительное (обычно положительным считают направление вращения входного вала механизма), тогда угловая скорость каждого звена кинематической цепи приобретает вполне определенный знак;
при одинаковом направлении угловых скоростей, входящих в (3.1), они имеют одинаковые знаки и, следовательно, определяют положительное передаточное отношение.
 | |  |
| Рис. 3.1 | | Рис. 3.2 |
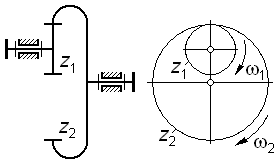
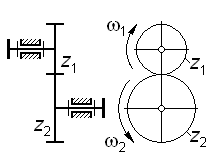
Очевидно, что для пары внутреннего зацепления (рис. 3.1) передаточное отношение
а для пары внешнего зацепления (рис. 3.2) -
19 ВОПРОС
Целью кинематического анализа является определение угловых скоростей звеньев и передаточных отношений.
Передаточное отношение между звеньями a и b определяется как отношение их угловых скоростей (или частот вращения):
Угловые скорости и частоты вращения связаны соотношениями
Очевидно, что перестановка индексов у величины
Если оси вращения звеньев a и b параллельны, то передаточному отношению
любое из двух возможных направлений вращения принимают за положительное (обычно положительным считают направление вращения входного вала механизма), тогда угловая скорость каждого звена кинематической цепи приобретает вполне определенный знак;
при одинаковом направлении угловых скоростей, входящих в (3.1), они имеют одинаковые знаки и, следовательно, определяют положительное передаточное отношение.
 | |  |
| Рис. 3.1 | | Рис. 3.2 |
Очевидно, что для пары внутреннего зацепления (рис. 3.1) передаточное отношение
а для пары внешнего зацепления (рис. 3.2) -
20 ВОПРОС
Графический метод кинематического анализа зубчатых механизмов
Графический метод применяют для определения линейных скоростей любой точки любого звена механизма, угловых скоростей его звеньев и передаточного отношения механизма.
Линейную скорость точки звена, совершающего вращательное движение, определяют:
где ω – угловая скорость вращения звена относительно мгновенного центра вращения;
R – расстояние точки до мгновенного центра вращения.
Из выражения (14) можно заключить, что при ω=const скорости точек меняются по линейному закону, для построения которого необходимо знать скорости только двух точек.
21 ВОПРОС
Эпициклические механизмы и передачи
Они бывают дифференциальными, планетарными и замкнутыми дифференциальными.
Устройство этих трех видов передач аналогично: в их состав входят зубчатые колеса с подвижными и неподвижными осями вращения. В основу положен дифференциальный механизм.
Дифференциальные зубчатые механизмы. Устройство и кинематика
Пусть мы имеем два соосных, независимых друг от друга центральных зубчатых колеса z1и z2- одно с внешними, другое с внутренними
зубьями (рис. 5.17).
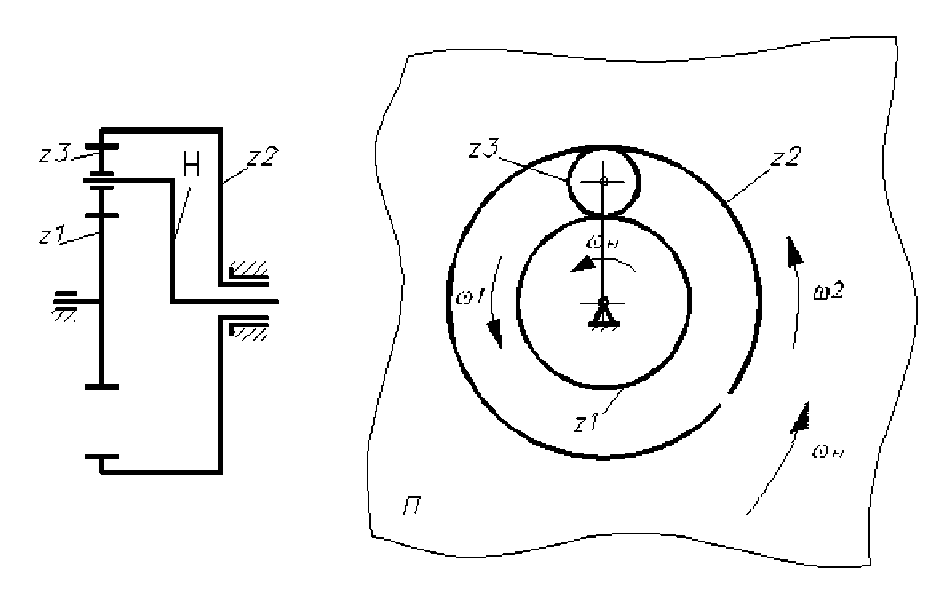
Рис. 5.17. Обращение движения в дифференциальном механизме
Такая механическая система имеет две степени свободы^ = 2). Независимо от положения колес радиальный зазор между их делительными окружностями одинаков. Поэтому в этот зазор можем ввести зубчатое колесо
z3(сателлит), который не изменит фактическую степень подвижности (W = 2). Сателлит является пассивной связью, т.к. сможет произвольно перекатываться в зазоре, не связывая независимое вращение колес Z1, Z2. Сателлитов, как правило, несколько. Как бы не располагался сателлит, расстояние от его центра до оси колес не меняется, поэтому можно ввести рычаг - водило Н, снимающий движение с оси сателлита при вращении вокруг оси центральных колес.
Полученный механизм по-прежнему обладает двумя степенями свободы и является дифференциальным. Он позволяет сложить угловые скорости о\, со2 и получить угловую скорость соя как результат этого сложения. По принципу суперпозиции:
«h = щ тщ- + w2 "ЦТ)-, (5ЛЗ)
U1-H U 2-H
где U(-H и U22-)H- передаточные отношения от центральных колес 1 и 2
к водилу H при независимом их вращении (одно вращается, другое закреплено). Чтобы раскрыть формулу (5.1З), воспользуемся методом обращения движения. Для этого введем в рассмотрение плоскость П, которая вращается вокруг оси центральных колес с угловой скоростью cwH, и поместим на эту плоскость наблюдателя. При неподвижном водиле Н (обращенный механизм) наблюдатель видит дифференциальный механизм таким, у которого оси колес неподвижны.
zi
Формула - формула Виллиса.
Дифференциальные механизмы применяют, например, в автомобилях, чтобы на повороте колеса могли свободно вращаться одно относительно другого, самопроизвольно распределяя суммарную скорость водила cwHв соответствии с (5.1 З).
Планетарные зубчатые механизмы. Кинематика и синтез
П
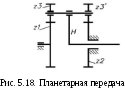 ланетарные механизмы получаются из дифференциальных путем закрепления одного из центральных колес. Закрепив, например, колесо 2 (рис. 5.18), в формуле (5.14) имеем со2 = 0 и тогда с помощью формул (5.13) и (5.14) получим:
ланетарные механизмы получаются из дифференциальных путем закрепления одного из центральных колес. Закрепив, например, колесо 2 (рис. 5.18), в формуле (5.14) имеем со2 = 0 и тогда с помощью формул (5.13) и (5.14) получим:(5.15)