Файл: Fluidsim как средство проектирования электропневмоавтоматики.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 612
Скачиваний: 18
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
О конечных положениях штока пневмоцилиндров контролеру будут сообщать соответствующие датчики, установленные на концах хода штока каждого пневмоцилиндре.
Согласно поставленной задаче, разработана пневмоэлектрическая схема, представленная на рисунке 125. На данной схеме изображены:
– 2 пневмоцилиндра 2-х стороннего действия 1А и 2А;
– 4 дросселя с обратным клапаном, для замедления хода;
– 2 пневматических 5/2 распределителя с двухсторонним электромагнитным управлением;
– 2 пары датчиков, на каждый пневмоцилиндр 1В1, 1В2, 2В1 и 2В2
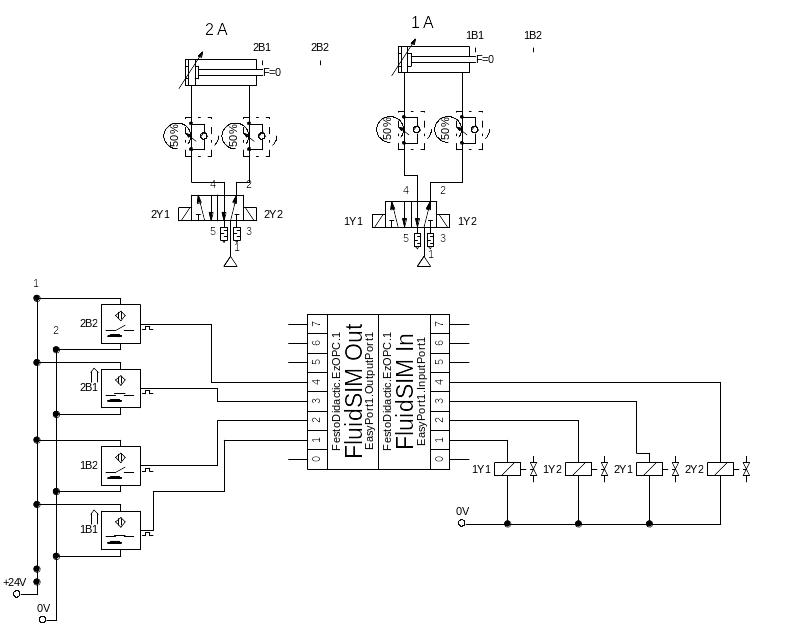
Рисунок 22 - Пневмоэлектрическая схема в FluidSim
Далее необходимо разработать текст управляющей программы, для представленной выше схемы. Текст программы пишется на языке STL в программном обеспечении FST.
Текст управляющей программы:
STEP 1 "ИНИЦИАЛИЗАЦИЯ СЧЕТЧИКА И ТАЙМЕРА"
IF NOP
THEN LOAD V500 " Задержка 5 секунд "
TO TP1
LOAD V50 " Задержка 0,5 секунд "
TO TP2
LOAD V5 "загрузка в счетчик - 5 "
TO CP1
STEP 2 "ВЫХОД В ИСХОДНОЕ ПОЛОЖЕНИЕ"
IF NOP
THEN SET O0.2 "Втягивание цилиндра 1А"
RESET O0.1
SET O0.4 "Втягивание цилиндра 2А"
RESET O0.3
SET C1 "Включить счетчик"
STEP 3 "ПРОВЕРКА СОСТОЯНИЯ СЧЕТЧИКА"
IF N C1 " Если счетчик не досчитал "
THEN JMP TO 5 "То переход на шаг 5"
OTHRW "Иначе..."
JMP TO 4 "Переход на шаг 4"
STEP 4 "УПРАВЛЕНИЕ ЦИЛИНДРОМ 1"
IF I0.1 "Если цилиндр 1 и 2 в исходном положении
AND I0.
THEN SET O0.1 "То выдвинуть цилиднр 1"
RESET O0.2
IF I0.2 "Если цилиндр 1 выдвинут "
THEN RESET O0.1 "То Задвинуть цилиндр 1"
SET O0.2
SET T2 "Запустить таймер временой задержки 0,5 секунд"
JMP TO 7 "Переход на шаг 7"
STEP 5 "УПРАВЛЕНИЕ ЦИЛИНДРОМ 2"
IF I0.1 "Если цилиндр 1 и 2 в исходном положении "
AND I0.3
THEN SET O0.3 "Выдвинуть цилиндр 2"
RESET O0.4
IF I0.4 "Если цилиндр 2 выдвинут, то"
THEN SET T1 "запустить таймер временой задержки 5 секунд"
JMP TO 6 "переход на шаг 6"
STEP 6 "ТАЙМЕР 1"
IF N T1 "Если 5 секунд прошло"
THEN JMP TO 2 "ТО перейти на шаг 2"
STEP 7 "ТАЙМЕР 2"
IF N T2 "Если 0,5 секунд прошло"
THEN INC CW1 "То увеличь счетчик на 1"JMP TO 3 "Перейти на шаг 3"
Далее программа из ПО FST загружается в FEC. Теперь можно запускать моделирование схемы во FluidSim.
2.4.1 Подбор цифрового позиционера
Рассмотрим цифровой позиционер Fisher DVC6200 со следующими
характеристиками:
Входной сигнал - Аналоговый входной сигнал: номинал 4–20 мА пост. тока;
Для аналогового управления минимальное напряжение на клеммах прибора должно быть равно 9,5 В пост. тока, а для интерфейса HART — 10 В пост. тока.
-
Минимальная сила тока управления: 4,0 мА -
Минимальный ток без перезапуска микропроцессора: 3,5 мА -
Максимальное напряжение: 30 В пост. тока -
Защита от перегрузки -
Защита от переполюсовки -
Многоточечное подключение. -
Электропитание: от 11 до 30 В пост. тока при силе тока 10 мА
Давление питания: минимально рекомендуемое: на 0,3 бар выше, чем максимально требуемое для привода. Максимальное: 10,0 бар или максимальное номинальное давление привода, в зависимости от того, как значение является более низким.
-
Рабочая среда – воздух. Рабочая среда должна быть чистой, сухой, не вызывающей коррозии и соответствовать требованиям стандарта ISA 7.0.01 или ISO 8573-1 -
Выходной сигнал - пневматический сигнал, до полного давления питания -
Минимальное значение шкалы: 0,4 бар. Максимальное значение шкалы: 9,5 бар -
Расход воздуха в установившемся режиме - при давлении питания 1,4 бар: менее 0,38 норм. м3/ч. При давлении питания 5,5 бар: менее 1,3 норм. м3/час. -
Максимальная выходная пропускная способность - при давлении питания 1,4 бар: 10,0 норм. м3/час. При давлении питания 5,5 бар: 29,5 норм. м3/час -
Пределы рабочей температуры окружающей среды - от -40 до 85 -
Независимая линейность - стандартное значение: ±0,50 % шкалы выходного сигнала -
Материалы конструкции Корпус, основание модуля и клеммная коробка: алюминиевый сплав A03600 с низким содержанием меди (стандартное исполнение) -
Соединения - подающая магистраль: внутренняя и внешняя опоры с резьбой 1/4 дюйма NPT для монтажа регулятора 67CFR. Выходная магистраль: внутренняя резьба 1/4 дюйма NPT. Трубопровод: рекомендуется 3/8 дюйма.
Рабочее давление у данного позиционера 5,5 бар, сравним расход при рабочем давлении требуемым расходом привода.
При давлении питания 5.5 бар расход воздуха составит 29 м3/час=0.008 м3/с
Найдем плотность воздуха при давлении 5.5 бар
???????? =6.51 ∗ 1.2 = 7.8 кг/м3
Найдем массовый расход при данной плотности
G = Q*???????? = 0.008*7.8 = 0.062 кг/с
Сравнивая потребный расход и расход из позиционера, делаем вывод, что позиционер выдаст больший расход, чем требуемый, значит позиционер подобранправильно.
Определим фактическое время прямого хода: t = m/G = 0.037 / 0.062 = 0.59 с
ЗАКЛЮЧЕНИЕ
Можно сделать вывод, что программный пакет FluidSIM является простым, но в то же время достаточно функциональным средством для проектирования и моделирования электропневматических схем. Поэтому данный программный продукт эффективно используется специалистами, занимающимися разработкой сложных мехатронных систем.
Программный пакет FluidSIM используется в цикле практических работ по специальности «Оснащение средствами автоматизация технологических процессов и производств (по отраслям)». Работа в данном программном пакете позволила получить практические навыки в проектировании электропневматических систем. Это позволяет повысить уровень подготовки будущих специалистов в области промышленной автоматизации.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
-
Евгенев Г. Б. и др. Основы автоматизации технологических процессов и производств: учебное пособие : в 2 т. ; под ред. Г. Б. Езгенева. - Москва : Издательство МГТУ им. Н. Э. Баумана, 2018. -
ПантелеевВ.Н., ПрошинВ.М.- Основы автоматизации производства: учебник для учреждений нач. проф. образования / 5-е изд., перераб. - М. : Издательский центр «Академия», 2019. - 208 с. -
Шишмарев В.Ю Автоматизация технологических процессов: учебник для студ. учреждений сред. проф. образования /. - 7е изд., испр. - М. : Издательский центр
«Академия», 2020. - 352 с.
-
Техническая литература [Электронный ресурс]. - Режим доступа: http://www.tehlit.ru , свободный. - Загл. с экрана. -
Портал нормативно-технической документации [Электронный ресурс]. – Режим доступа: http://www.pntdoc.ru , свободный. - Загл. с экрана.