ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 64
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство образования и науки РФ
федеральное государственное бюджетное
образовательное учреждение высшего образования
«Омский государственный технический университет»
Факультет Транспорта нефти и газа
Кафедра «Машиноведение»
КУРСОВОЙ ПРОЕКТ (РАБОТА)
по дисциплине «Теория механизмов и машин»
на тему «Проектирование и исследование механизма»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
КП - 2068998 - 15- У3 – 10-21
Студента (ке) Пупкова Валерия Игнатьевна
Курс 2, Группа РК-211
Направление (специальность) Ракетные комплексы и космонавтика
Руководитель: Згонник Ирина Павловна
Выполнил(а)_________________ 20___г.
К защите ____________________20___г.
| Выполнение и подготовка к защите КП | Защита КП | Итоговый рейтинг |
| | | |
Проект защищен с оценкой_____________________
Омск-2021
Министерство образования и науки РФ
федеральное государственное образовательное
учреждение высшего образования
«Омский государственный технический университет»
Факультет (институт)___________________
Кафедра «Машиноведение»
Дисциплина _____________________________
ЗАДАНИЕ
на выполнение курсового проекта (курсовой работы)
Студенту (ке)_________________________________________Группа___________
Направление (специальность) ____________________________________________
______________________________________________________________________
Тема курсового проекта «Проектирование и исследование механизма»
Срок сдачи проекта на кафедру «___»____________________20____ г.
Исходные данные к проекту __________________________________________
__________________________________________________________________
Содержание пояснительной записки (перечень подлежащих разработке вопросов):
-
Метрический синтез механизма. -
Структурный анализ механизма. -
Кинематический анализ механизмов. -
Кинетостатическое исследование рычажного механизма. -
Уравновешивание механизма.
Перечень графического материала с указанием основных чертежей: 1 лист – А1, иллюстративный пояснительный материал содержится в пояснительной записке к курсовому проекту (курсовой работе).
Методическая литература и иные информационные источники
-
Артоболевский И.И. Теория механизмов и машин: учебник для втузов. – 4-е изд., перераб и доп. / И.И. Артоболевский.– М.: Наука, 1988. – 640 с. -
Фролов К.В. Теория механизмов и механика машин: учебник для втузов. – 5-е изд. / К.В. Фролов. – М.: Высшая школа, 2005 . – 496 с. -
Федоров Н.Н. Проектирование и кинематика плоских механизмов: учеб. пособие / Н.Н. Федоров. – Омск: Изд-во ОмГТУ, 2000. – 144 с. -
Федоров Н.Н. Кинетостатика плоских механизмов и динамика машин: учеб. пособие / Н.Н. Федоров. – Омск: Изд-во ОмГТУ, 2001. – 136 с. -
Дюндик О.С. Строение и кинематика механизмов: учеб. пособие / О.С. Дюндик; Минобрнауки России, ОмГТУ. – Омск: Изд-во ОмГТУ, 2017. – 144 с. -
Рязанцева И.Л. Схемный анализ и синтез механизмов и машин: учеб. пособие / И.Л. Рязанцева; Минобрнауки России, ОмГТУ. – Омск: Изд-во ОмГТУ, 2017. – 186с.
Дата выдачи задания «_____» ___________________ 20___ г.
Руководитель _________________ _______________
Зав. кафедрой _________________ д.т.н., профессор П.Д. Балакин
Задание принял к исполнению студент(ка)______________ «___» ______20___ г.
Аннотация
Расчетно-пояснительная записка содержит структурный, кинематический и кинетостатический анализ кривошипно-ползунного механизма рабочей машины.
Записка машинописного текста – 31 стр., рисунков 15, таблиц 5.
Библиографический список состоит из трёх наименований.
Содержание
Введение
Изучаемая дисциплина «Теория механизмов и машин» рассматривает задачи строения, кинематики и динамики механизмов.
Курсовой проект по дисциплине «Теория механизмов и машин» предусматривает исследования кривошипно-ползунного механизма по трем основным разделам:
-
структурный анализ; -
кинематический анализ; -
кинетостатический анализ;
Структурный анализ даёт общее представление об устройстве исследуемого механизма. В ходе данного анализа определяются структура и подвижность механизма, а также класс кинематических пар в составе механизма. Эти сведения будут необходимы в дальнейшем при расчёте структурного механизма.
Кинематический анализ предусматривает расчет кинематических характеристик. В данном разделе строятся 12 различных положений механизма за одинаковые промежутки времени, рассчитываются скорости, ускорения, перемещения точек и звеньев. Расчеты ведутся методом планов (т.е. решение уравнений векторным способом) и методом кинематических диаграмм.
Силовое исследование кривошипно-ползунного механизма основывается на принципе. Д’Аламбера. При котором к статически определяемой структурной группе помимо действующих внешних сил добавляют силы инерции и рассматривают эту группу Ассура, как находящуюся в равновесии. Кинетостатический расчет проводится методом планов сил, а в качестве результата определяется уравновешивающая сила на ведущем звене механизма.
1. Структурный анализ механизма
Структурный анализ позволяет разобраться в устройстве механизма. Основные цели, которые должны быть достигнуты в данном разделе – это:
• Определение структуры механизма;
• Расчет подвижности механизма.
Расчет подвижности механизма. Кривошипно-ползунный механизм состоит из 4 звеньев (рис. 1.1): О(0) – стойка, ОА(1) – кривошип, АВ(2) – шатун, В(3) – ползун
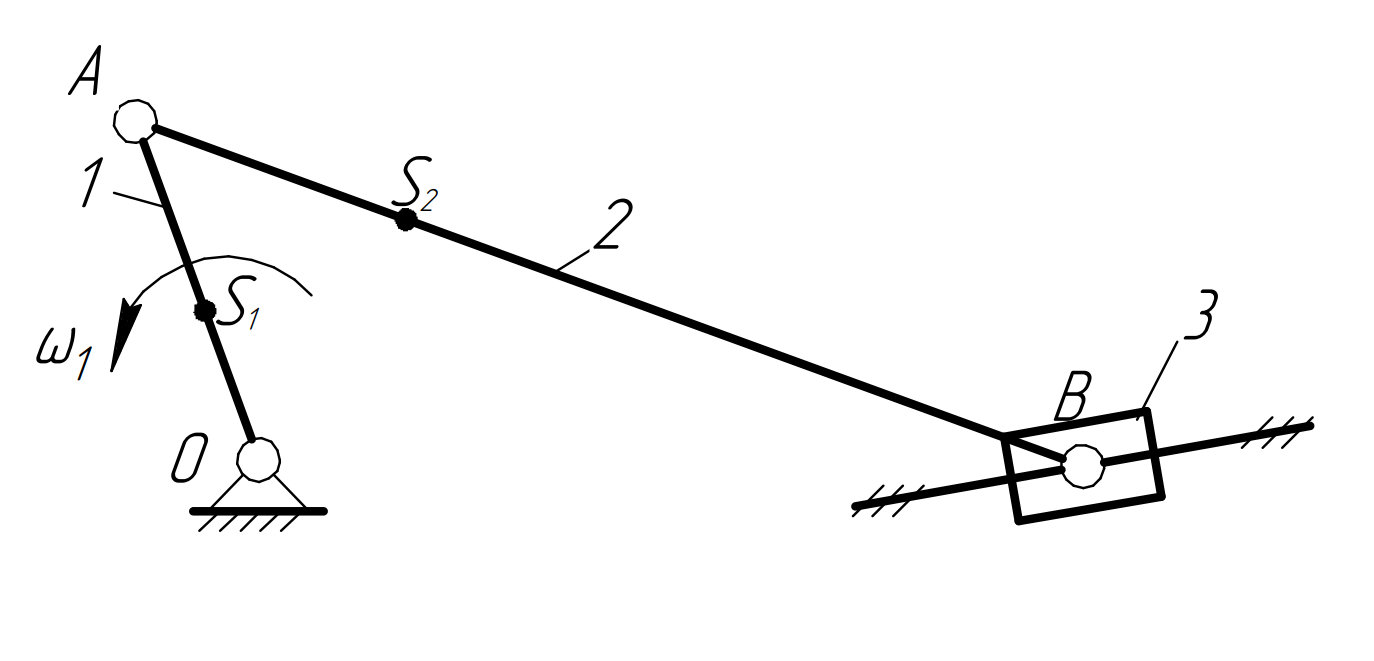
Рис. 1.1 Схема кривошипно-ползунного механизма.
Подвижность кривошипно-ползунного механизма определим по формуле П.Л. Чебышева:
 (1,1)
(1,1)где n – число подвижных звеньев;
Кинематические пары: (0,1) – вращательная; (1,2) – вращательная; (2,3) – вращательная; (3,0) – поступательная
 – число кинематических пар 5 класса;
– число кинематических пар 5 класса;  – число кинематических пар 4 класса;
– число кинематических пар 4 класса;В нашем случае
 , следовательно, в механизме 1 звено способно совершать независимое движение.
, следовательно, в механизме 1 звено способно совершать независимое движение.
Рис. 1.2 Структурная схема механизма.
Формулу образования механизма составляем в соответствии со структурной схемой по рис. 1.2:
Наиболее высокий класс группы, входящий в механизм равен II, следовательно, данный механизм II класса.
2. Кинематический анализ механизма
2.1 Кинематический анализ методом планов.
Кинематический анализ методом планов (гра
фоаналитический метод) достаточно прост, нагляден и имеет достаточную для инженерных расчетов точность. Его суть в том, что связь между скоростями и ускорениями описывается векторными уравнениями, которые решаются графически.
2.1.1 Построение крайних положений.
Крайние положения механизма определяется взаимным расположением кривошипа 1 и шатуна 2, поэтому построение крайних положений начинаем с этих звеньев.
Для построения необходимо вычислить масштабный коэффициент, который позволяет выдержать все пропорции и связать реальные размеры механизма с размерами, используемыми в графической части. Масштабный коэффициент определяется из отношения реального размера механизма (выражается в метрах) к размеру на листе в графической части (выражается в миллиметрах). Найдем значение масштабного коэффициента, используя действительный размер кривошипа, равный 0,059 м, и размер кривошипа на листе графической части, который примем 59 мм:
 (2.1)
(2.1)где
 – реальный размер кривошипа, ОА – размер в графической части.
– реальный размер кривошипа, ОА – размер в графической части. (2.2)
(2.2)Пользуясь полученным масштабным коэффициентом, рассчитаем остальные размеры звеньев механизма.
 (2.3)
(2.3)Аналогично и для всех остальных размеров. Результаты вычислений размеров приведены в таблице 1.
Таблица 1
| |  |  |  |  | e |
| Исходные данные, м | 0,059 | 0,032 | 0,231 | 0,1 | 0,038 |
| Чертеж, мм | 59 | 32 | 231 | 100 | 38 |
Из точки О радиусом ОА = 59 мм проводим окружность, траекторию движения точки А шатуна АВ. Крайние положения точки А будут в тех случаях, когда кривошип (ОА) и шатун (АВ) будут параллельны и лежат одной линии. Полученные точки обозначаем, одновременно, по известным размерам шатуна, определяются крайние положения ползуна
 и
и  .
.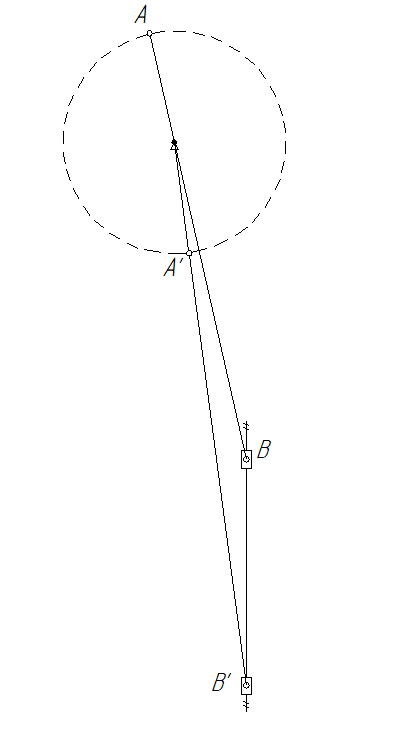
Рис. 2.1 Крайние положения кривошипно-ползунного механизма.
2.1.2 Построение разметки механизма.
Разметка механизма представляет собой механизм в двенадцати положениях в определенные моменты времени. Разметка механизма строится исходя из исходных данных.
Расстояние на окружности движения кривошипа разбиваем на 12 частей, начиная с положения
 . Получаем 11 промежуточных положений точек А, определяющих положения кривошипа ОА.
. Получаем 11 промежуточных положений точек А, определяющих положения кривошипа ОА.С помощью геометрических построений и ранее полученных значений определяем 11 положений точек В и центры тяжести кривошипа и шатуна по значениям
 и
и  соответственно.
соответственно.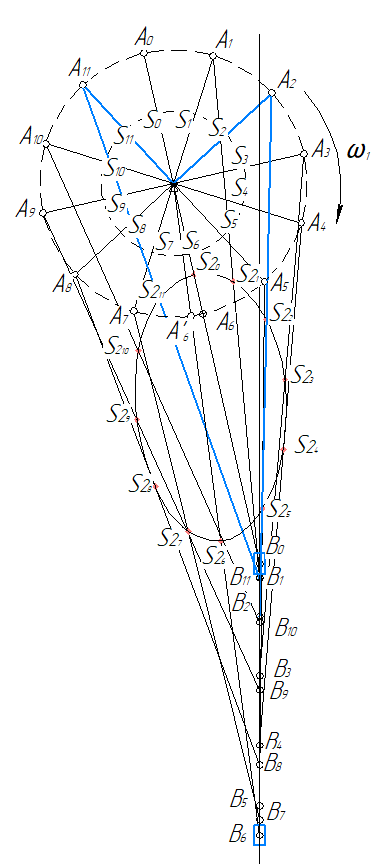
Рис. 2.2 Кинематическая схема механизма в 12-ти положениях.
2.1.3 Определение скоростей для 12-ти положений.
Расчет скоростей производится для всех двенадцати положений механизма. Рассчитываются линейные и угловые скорости всех звеньев, а так же скорости центров масс.
Расчет скоростей и построение планов проведем для второго положения механизма (для остальных положений расчет выполняется аналогично).
Угловая скорость кривошипа:

Используя значение угловой скорости кривошипа определяем скорость точки А:
 (2.4)
(2.4)Данная скорость направлена перпендикулярно к звену ОА а сторону его вращения (в данном случае против часовой стрелки).