ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 65
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
2.2 Кинематический анализ методом диаграмм.
2.2.1 Построение диаграммы скорости выходного звена.
Метод кинематических диаграмм позволяет наглядно просмотреть, как изменяются скорость, перемещение и ускорение за цикл работы механизма. Анализ методом диаграмм начнем с построения диаграммы скорости. Первоначально выбираем масштабный коэффициент диаграммы
 . Для определения коэффициента необходимо составить пропорцию:
. Для определения коэффициента необходимо составить пропорцию: (2.27)
(2.27)Где Vmax– максимальная скорость выходного звена с плана скоростей
Для построения диаграмм нам также потребуется масштабный коэффициент времени
 и масштабный коэффициент угла поворота
и масштабный коэффициент угла поворота  . Эти коэффициенты рассчитаем по формулам:
. Эти коэффициенты рассчитаем по формулам: (2.28)
(2.28)где
 – время цикла,
– время цикла, 
 (2.29)
(2.29) (2.30)
(2.30)Из уравнения (2.29) выразим n и подставим в уравнение (2.31):
 (2.31)
(2.31)
После определения масштабных коэффициентов приступаем к построению диаграммы скорости выходного звена B в системе координат V(t). Для этого ось абсцисс делим на 12 равных частей (по 20 мм каждый).
Проводим ординатные прямые через эти 12 точек длиной
 от оси абсцисс в соответствии с
от оси абсцисс в соответствии с
формулой.
 (2.32)
(2.32)где
 – скорость выходного звена с плана скоростей. Соединив получившиеся точки 0,1,2,…,12 плавной кривой, получим диаграмму скоростей точки B.
– скорость выходного звена с плана скоростей. Соединив получившиеся точки 0,1,2,…,12 плавной кривой, получим диаграмму скоростей точки B.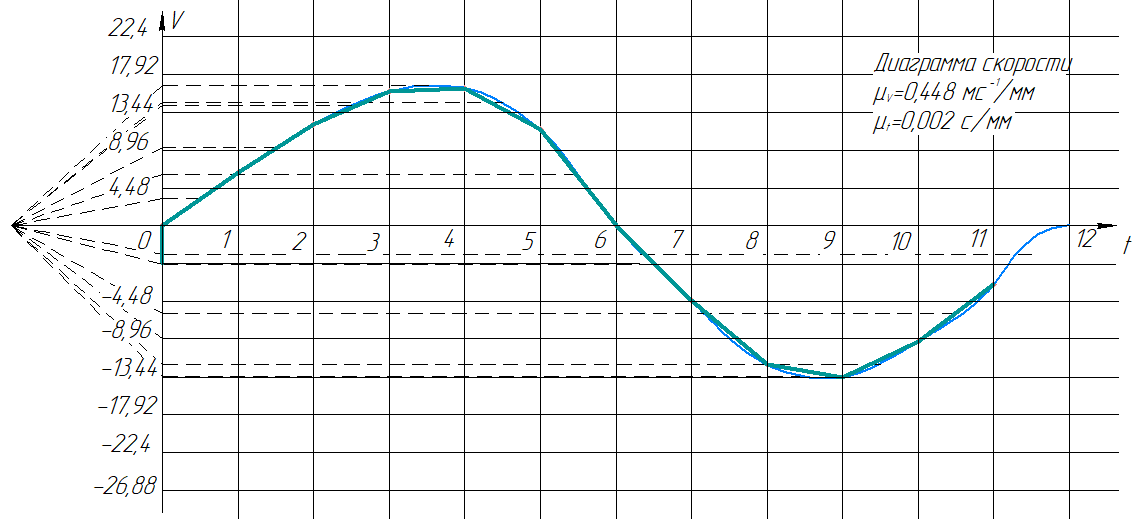 Рис. 2.6 Диаграмма скоростей выходного звена.
Рис. 2.6 Диаграмма скоростей выходного звена.2.2.2 Построение диаграммы перемещения выходного звена.
Диаграмма перемещения точки B строится методом графического интегрирования способом хорд. Данный метод заключается в следующем:
-
Из середины отрезка, соединяющего точки 0 и 1 на оси абсцисс, проводится перпендикуляр до пересечения с графиком скорости. Из найденной точки проводится горизонталь до пересечения с осью ординат. -
Откладываем на расстоянии в качестве полюса точку P. Из точки, найденной пересечением горизонтали с осью ординат, проводим отрезок в точку P. Получившийся отрезок переносим на график перемещения таким образом, чтобы начало отрезка, то есть тока P, находилась в 0 на графике
в качестве полюса точку P. Из точки, найденной пересечением горизонтали с осью ординат, проводим отрезок в точку P. Получившийся отрезок переносим на график перемещения таким образом, чтобы начало отрезка, то есть тока P, находилась в 0 на графике  , а пересечения отрезка с вертикалью из точки 1 задаст конец.
, а пересечения отрезка с вертикалью из точки 1 задаст конец.
Таким же образом рассмотрим все интервалы. В результате получим ряд отрезков, каждый из которых переносим на график перемещений аналогичным образом, за начало следующего отрезка, принимая точку 1 и т.д. Затем соединяем точки плавной кривой и получаем исходный график.

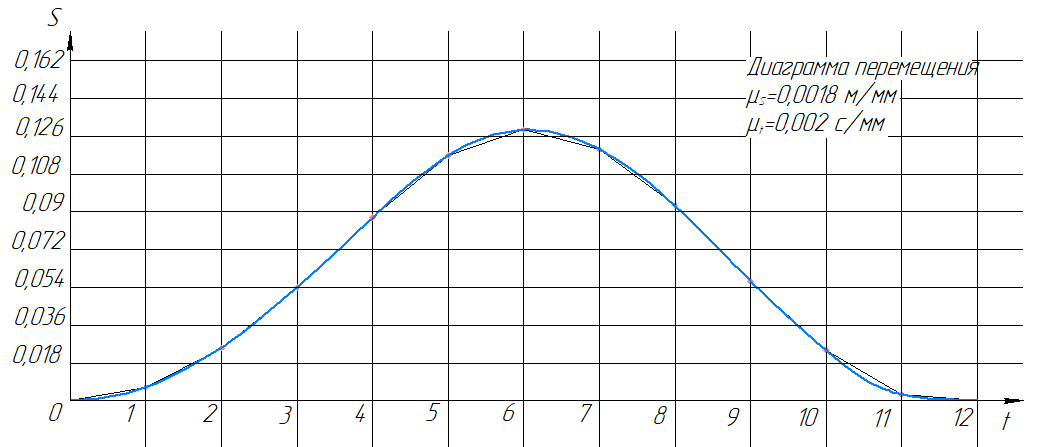 Рис.2.7 Диаграмма перемещения выходного звена.
Рис.2.7 Диаграмма перемещения выходного звена.2.2.3 Построение диаграммы ускорения выходного звена.
Диаграмма ускорения точки B строится методом графического дифференцирования, способом хорд. Данный метод заключается в следующем:
-
Проводим хорду, которая соединяет концы начальной и конечной ординат кривой на данном интервале. -
По оси абсцисс выбираем произвольную точку P (40 мм) в качестве полюса. Из этой точки проводим до пересечения с осью ординат луч, параллельный хорде, на оси ординат получаем отрезок, выражающий в некотором масштабе величину производной в средней точке интервала.
Таким же образом рассмотрим все интервалы. В результате получим ряд точек, каждая из которых расположена в середине соответствующего интервала. Затем соединяем эти точки плавной прямой и получаем искомый график.
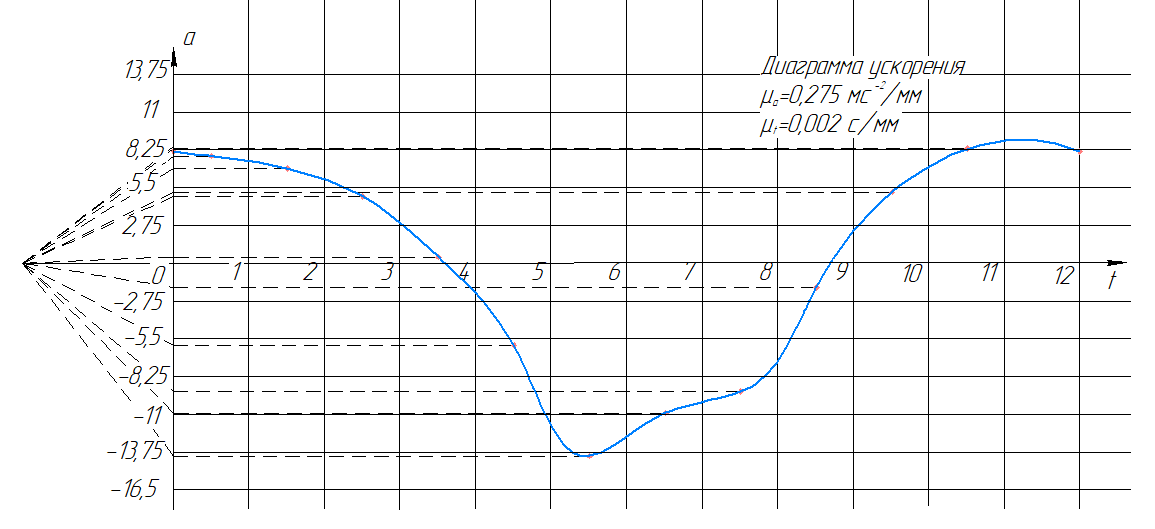
Рис. 2.8 Диаграмма ускорения выходного звена.
3. Кинетостатический анализ механизма.
Цели кинетостатического анализа:
-
определение силы полезного сопротивления в рассматриваемых положениях механизма; -
определение реакций в кинематических парах; -
определение уравновешивающей силы методом планов.
3.1 Силовой расчет методом планов.
Силовой расчет методом планов позволяет определить реакции в кинематических парах и уравновешивающий момент. Этот метод прост, нагляден и достаточно точен для инженерных расчетов.
3.1.1 Определение силы полезного сопротивления.
Построение разметки механизма и силовой диаграммы.
Порядок построения разметки для силового расчета механизма не отличается от ее построения в разделе кинематического анализа, поэтому здесь каких-либо дополнительных пояснений не требуется. После построения разметки переходим к силовой диаграмме, которую необходимо перенести из исходных данных на лист. При этом важно определить величины сил сопротивления в каждом положении разметки и установить их соответствие этим положениям. На разметке механизма имеются отметки положения точки B ползуна. Направим ось абсцисс искомого графика параллельно траектории точки B от ее нулевого положения в сторону другого крайнего положения. Перпендикулярно этой оси направим ось ординат. При этом по оси абсцисс, по существу, откладывается перемещение точки B, по оси ординат так же, как на исходном графике, откладывается сила сопротивления
 .
.В выбранной системе координат необходимо вдоль обеих осей нанести шкалы и затем координатную сетку точно так же, как это сделано на исходном графике в задании на курсовой проект. В соответствии с масштабным коэффициентом
 переносим график.
переносим график.  (3.1)
(3.1)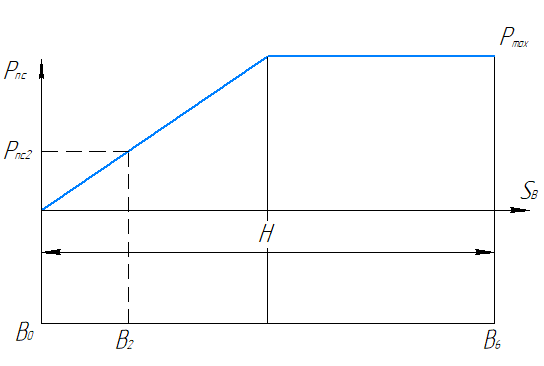
Рис. 3.1 Силовая диаграмма.
Найдем силу сопротивления для 2-го положения. Для этого по оси абсцисс из точки нулевого положения откладываем расстояние, пройденное ползуном до точки 2-го положения. Из этой точки проводим перпендикуляр от оси абсцисс до пересечения с графиком. Из точки пересечения проводим перпендикуляр к оси ординат. Измерив расстояние из начала координат до точки пересечения на оси ординат и умножив на коэффициент
 найдем силу сопротивления для 2-го положения
найдем силу сопротивления для 2-го положения  .
. (3.2)
(3.2)3.1.2 Силовой расчет структурной группы.
Перенесем звено АB с разметки механизма и в точке А освободим его от связей, отбросив звено 1 и заменив действие этого звена реакцией
 , которое, в свою очередь, имеет нормальную
, которое, в свою очередь, имеет нормальную  и тангенциальную
и тангенциальную  составляющие.
составляющие.К звеньям группы прикладываем силы тяжести, инерции, полезного сопротивления, реакции связей. На схеме нагружения (рис. 3.2) силы изображаем отрезками произвольной величины, но строго выдерживая направления этих сил. Силы инерции направляем в сторону противоположную ускорению соответствующих точек. Сила полезного сопротивления направлена в сторону, противоположную направлению скорости ползуна в выбранном положении.
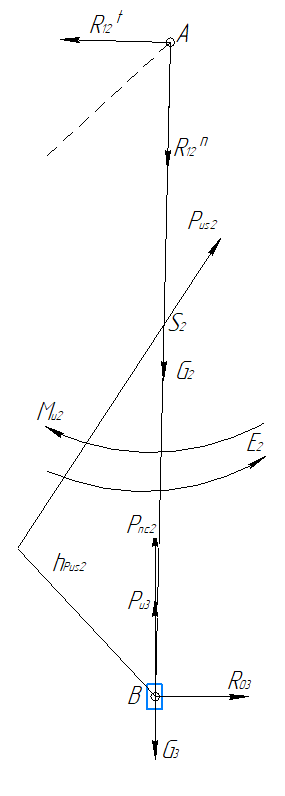 Рис. 3.2 Схема нагружения группы Ассура II класса, 2-го вида для 2-го положения
Рис. 3.2 Схема нагружения группы Ассура II класса, 2-го вида для 2-го положенияОпределим действующие силы для 2-го положения.
Сила инерции ползуна:
 (3.3)
(3.3)где


Сила инерции звена АB:
 (3.4)
(3.4)где


Момент – направлен в противоположную сторону угловому ускорению:
 (3.5)
(3.5)
Силы тяжести для 2-го и 3-го звеньев:
 (3.6)
(3.6)где



Запишем сумму моментов относительно ползуна B:
 (3.7)
(3.7)Плечи h определим по формуле:
 (3.8)
(3.8)Из уравнения (3.7) выразим
 :
: (3.9)
(3.9)
Запишем сумму всех сил, действующих на группу:
 (3.10)
(3.10)Решим уравнение (3.10) графически. Для этого найдем масштабный коэффициент
 :
: (3.11)
(3.11)где
 – наибольшая сила из действующих на группу.
– наибольшая сила из действующих на группу.Ставим полюс и в соответствии с коэффициентом наносим последовательно все силы из уравнения (3.10). Вектора
 и
и  строим в последнюю очередь. Пересечения линий действия этих двух векторов и будет решением уравнения.
строим в последнюю очередь. Пересечения линий действия этих двух векторов и будет решением уравнения.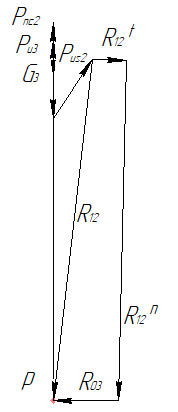
Рис. 3.3 План сил для 2-го положения.
Для определения численных значений сил
