ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 367
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ГЛАВА ДЕВЯТАЯ. Проектирование асинхронных машин
В асинхронных машинах преобразование энергии происходит при несинхронном (асинхронном) вращении ротора и магнитного поля статора [6].
9.1. ОБЩИЕ СВЕДЕНИЯ
В двигательном режиме разница частот вращения ротора и поля статора в большинстве случаев невелика и составляет лишь несколько процентов. Поэтому частоту вращения ротора оценивают не в абсолютных единицах (об/мин или об/с), а в относительных, вводя понятие скольжения:
s = (nс - n)/nс,
где nс — частота вращения поля (синхронная частота вращения); n - частота вращения ротора.
Скольжение выражается либо в относительных единицах (s = 0,02; 0,025 и т. п.), либо в процентах (s = 2 %; 2,5 % и т. п.).
Частота тока и ЭДС, наводимая в проводниках обмотки ротора зависят от частоты тока и ЭДС обмотки статора и от скольжения:
f2 = f1s; Е'2 = E1s,
где E1 — ЭДС обмотки статора; Е'2 — ЭДС обмотки ротора, приведенная к числу витков обмотки статора.
Теоретически асинхронная машина может работать в диапазоне изменения скольжения s = -∞...+ ∞ (рис. 9.1), но не при s = 0, так как в этом случае n = nс и проводники обмотки ротора неподвижны отнoсительно поля статора, ЭДС и той в обмотке равны нулю и момент отсутствует. В зависимости от практически возможных скольжений различают несколько режимов работы асинхронных машин (рис. 9.1): генераторный режим при s < 0, двигательный при 0 < s < l, трансформаторный при s = 1 и тормозной при s > 1. В генераторном режиме ротор машины вращается в ту же сторону, что и поле статора, но с большей частотой.
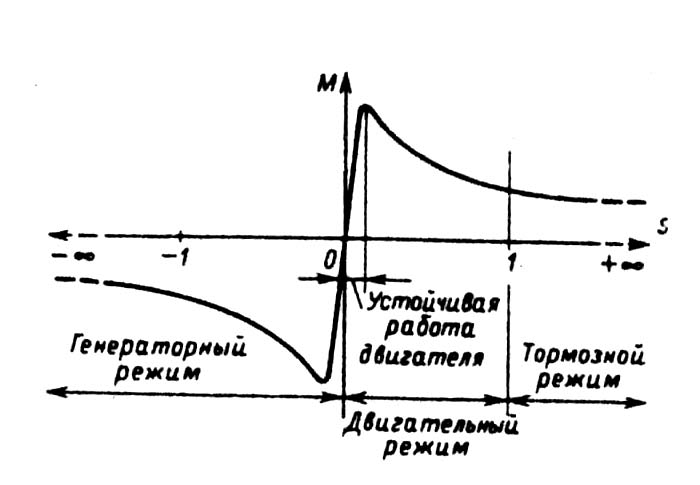
Рис. 9.1. Механическая характеристика асинхронной машины
В двигательном — направления вращения поля статора и ротора совпадают, но ротор вращается медленнее поля статора: n = nc(1 - s). В трансформаторном режиме ротор машины неподвижен и обмотки ротора и статора не перемещаются относительно друг друга. Асинхронная машина в таком режиме представляет собой трансформатор и отличается от него расположением первичной и вторичной обмоток (обмотки статора и ротора) и наличием воздушного зазора в магнитопроводе. В тормозном режиме ротор вращается, но направление его вращения противоположно направлению поля статора и машина создает момент, противоположный моменту, действующему на вал. Подавляющее большинство асинхронных машин используют в качестве двигателей, и лишь очень небольшое количество — в генераторном и трансформаторном режимах, в тормозном режиме — кратковременно.
Для оценки механической характеристики асинхронного двигателя моменты, развиваемые двигателем при различных скольжениях, обычно выражают не в абсолютных, а в относительных единицах, т. е. указывают кратность по отношению к номинальному моменту: М* = М/Мном. Зависимость М* = f(s) асинхронного двигателя (рис. 9.2) имеет несколько характерных точек, соответствующих пусковому М*п, минимальному М*min, максимальному М*mах и номинальному М*ном моментам.
Пусковой момент М*п характеризует начальный момент, развиваемый двигателем непосредственно при включении его в сеть при неподвижном роторе (s = 1). После трогания двигателя с места его момент несколько уменьшается по сравнению с пусковым (см. рис. 9.2). Обычно М*min на 10... 15 % меньше М*п . Большинство двигателей проектируют так, чтобы их Mmin был больше Мном, так как они могут достигнуть номинальной скорости лишь при условии, что момент сопротивления, приложенный к валу, будет меньше, чем М min.
Максимальный момент М*mах характеризует перегрузочную способность двигателя. Если момент сопротивления превышает М*mах, двигатель останавливается. Поэтому М*mах называют также критическим, а скольжение, при котором момент достигает максимума, - критическим скольжением sкр. Обычно sкр не превышает 0,1...0,15; в двигателях с повышенным скольжением (крановых, металлургических и т. п.) sкр может быть значительно большим.
В диапазоне 0 < s < sкр характеристика М = f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s > sкр двигатель в нормальных условиях работать не может. Эта часть характеристики определяет пусковые свойства двигателя от момента пуска до выхода на рабочую часть характеристики.
Трансформаторный режим, т. е. режим, когда обмотка статора подключена к сети, а ротор неподвижен, называют также режимом короткого замыкания двигателя. При s = 1 ток
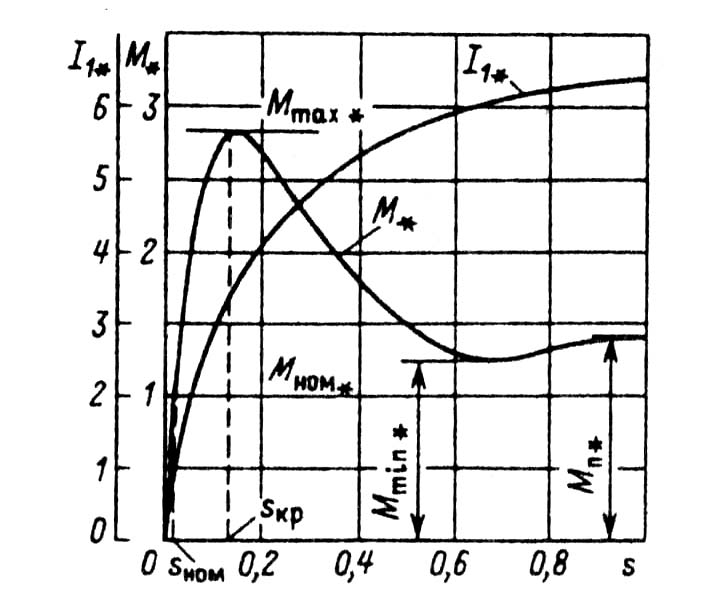
Рис. 9.2. Зависимость тока и момента
асинхронного двигателя от скольжения
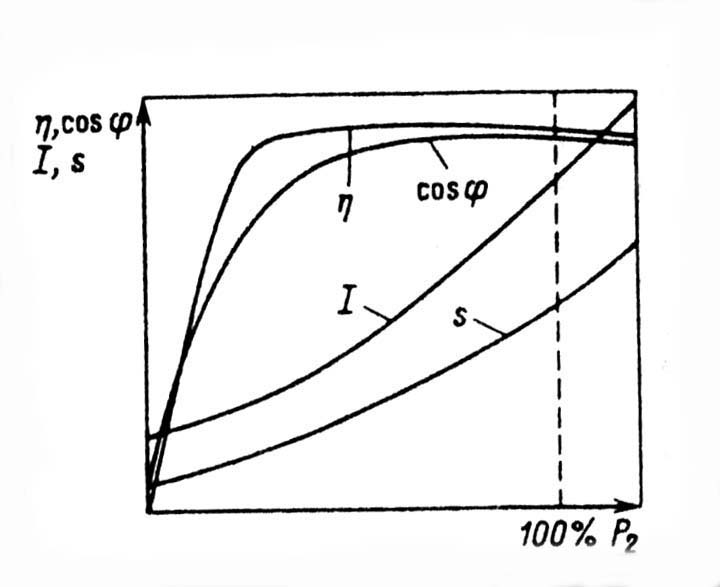
Рис. 9.3. Рабочие характеристики
асинхронного двигателя
двигателя в несколько раз превышает номинальный, а охлаждение много хуже, чем при номинальном режиме. Поэтому в режиме короткого замыкания асинхронный двигатель, не рассчитанный для работы при скольжениях, близких к единице, может находиться лишь в течение нескольких секунд.
Режим короткого замыкания возникает при каждом пуске двигателя, однако в этом случае он кратковременен. Несколько пусков двигателя с короткозамкнутым ротором подряд или через короткие промежутки времени могут привести к превышению допустимой температуры его обмоток и к выходу двигателя из строя.
Для работы асинхронных машин со скольжениями, близкими к единице, в трансформаторном или тормозном режимах их рассчитывают с пониженными электромагнитными нагрузками. Примером использования асинхронных машин, номинальным режимом для которых является трансформаторный, могут служить индукционные регуляторы или фазовращатели [6].
Рабочие характеристики асинхронных двигателей (рис. 9.3) показывают, что наибольшего КПД правильно спроектированный двигатель достигает при нагрузке, на 15...20% меньше номинальной. Двигатели рассчитываются так потому, что большинство из них из-за стандартной дискретной шкалы мощностей работают с недогрузкой. Напомним, что наибольший КПД будет у двигателя при нагрузке, при которой постоянные не зависящие от тока потери (потери в стали, механические, вентиляционные) будут в сумме равны переменным, зависящим от тока, — электрическим потерям в обмотках двигателя (см. гл. 6). Это позволяет при проектировании направленным выбором плотности тока в обмотках и индукции на участках магнитопровода определить нагрузку, при которой КПД достигнет наибольшего значения.
Конструктивные исполнения асинхронных двигателей по способу монтажа соответствуют ГОСТ 2479. Наибольшее распространение получили группы исполнения IM2-IM4 (см. гл. 1), т.е. двигатели со станиной на лапах или с разного вида фланцами на станине или на подшипниковом щите. Среди двигателей малой мощности встречаются группы исполнения IM5 — машины без подшипниковых щитов и IM9 — машины специального исполнения, которые часто применяют как встроенные в различные механизмы, в ручной электрифицированный инструмент и т. п. Асинхронные двигатели мощностью более 1000 кВт, особенно с малой частотой вращения, часто выполняют с выносными подшипниковыми стойками — группа исполнения IM7 или IM8.
По степени защиты от воздействия окружающей среды наиболее характерны для двигателей малой и средней мощности исполнения IP44 и IP54 со способом охлаждения IC0141. Двигатели средней мощности выпускают также со степенью защиты IP23 и способом охлаждения IC01. Двигатели большой мощности на высокое напряжение часто имеют закрытое исполнение со встроенным воздушным или водяным охладителем, например с охлаждением по способу IC37A81 (см. гл. 7).
Сердечники статоров и роторов всех асинхронных двигателей общего назначения шихтуют из листов электротехнической стали толщиной 0,5 мм. При длине сердечника менее 250...300 мм они выполняются без вентиляционных каналов. При большей длине сердечники подразделяют на пакеты длиной 40...50 мм каждый. Между пакетами устанавливают дистанционные распорки, при этом образуются радиальные вентиляционные каналы, служащие для прохода охлаждающего воздуха. Ширина каналов в большинстве машин выполняется равной 10 мм. В собранной машине радиальные каналы статора и ротора располагаются напротив друг друга.
Статоры машин общего назначения напряжением до 660 В, мощностью до 100 кВт имеют трапецеидальные полузакрытые пазы с узким шлицем (см. рис. 3.4), размерные соотношения которых (ширину верхней и нижней частей и высоту паза) выполняют такими, чтобы зубцы статора имели параллельные стенки. Это уменьшает МДС зубцов по сравнению с зубцами с неравномерной площадью поперечного сечения. Обмотку таких машин выполняют из круглого провода.
В статорах машин большей мощности обмотку выполняют из прямоугольного провода, причем при напряжении, не превышающем 660 В, из подразделенных катушек. Пазы статора в таких машинах полуоткрытые (см. рис. 3.6, а), что позволяет избежать большой неравномерности индукции в воздушном зазоре. Обмотку укладывают в пазы, пропуская через суженный шлиц паза каждую из полукатушек поочередно (см. гл. 3).
В статорах машин с номинальным напряжением 3 кВ и выше и машин специального исполнения независимо от напряжения выполняют обмотку из жестких, изолированных до укладки в пазы катушек. Поэтому пазы таких машин делают только открытыми (см, рис. 3.6, б).
Конструкция крепления сердечника статора в корпусе зависит от габаритов и мощности машины. В большинстве машин малой мощности корпуса выполняют из алюминия, в некоторых конструкциях - заливкой алюминия на собранный сердечник статора. Подшипниковые щиты также алюминиевые. В машинах большей мощности и корпуса, и подшипниковые щиты чугунные. В машинах больших габаритов корпуса сварные из стальных листов, закрытые снаружи листовой сталью. Магнитопровод крепится к продольным ребрам корпуса.
Магнитопроводы роторов шихтуют из той же стали, что и статоров. В двигателях общего назначения с высотой оси вращения до 450 мм их насаживают непосредственно на вал, причем до высоты1 оси вращения 250 мм — на гладкий вал; в двигателях с большей высотой оси вращения — крепят на валу с помощью шпонки. Сердечники роторов больших габаритов насаживают на втулку или на остов ротора.
В большинстве асинхронных двигателей вентиляторы устанавливают на валу ротора, в двигателях со степенью защиты IP23 - внутри корпуса, со степенью защиты IP44 и IP54 — вне корпуса и защищают кожухом.
Асинхронные двигатели подразделяют на два типа: с короткозамкнутыми (рис. 9.4) и фазными (рис. 9.5) роторами. По конструкции они отличаются между собой только роторами и отдельными элементами корпусов. В пазах фазных роторов располагают изолированную трехфазную обмотку, жестко соединенную в звезду или в треугольник. Обмотка имеет три вывода, которые соединены токопроводами с контактными кольцами. Прилегающие к контактным кольцам щетки электрически соединяют выводы обмотки ротора с пусковым реостатом, который позволяет увеличивать сопротивление роторной цепи во время пуска двигателя. Контактные кольца располагают либо внутри корпуса, либо вне его на выступающем конце вала. При такой конструкции кольца и весь щеточный аппарат закрывают кожухом из листовой стали.
При пуске двигателя между кольцами включают пусковые резисторы, что увеличивает активное сопротивление цепи ротора и, следовательно, пусковой момент двигателя и ограничивает ток при пуске и разгоне. По мере разгона группы резисторов пускового реостата поочередно замыкают, причем время замыкания очередной группы выбирают таким, чтобы до
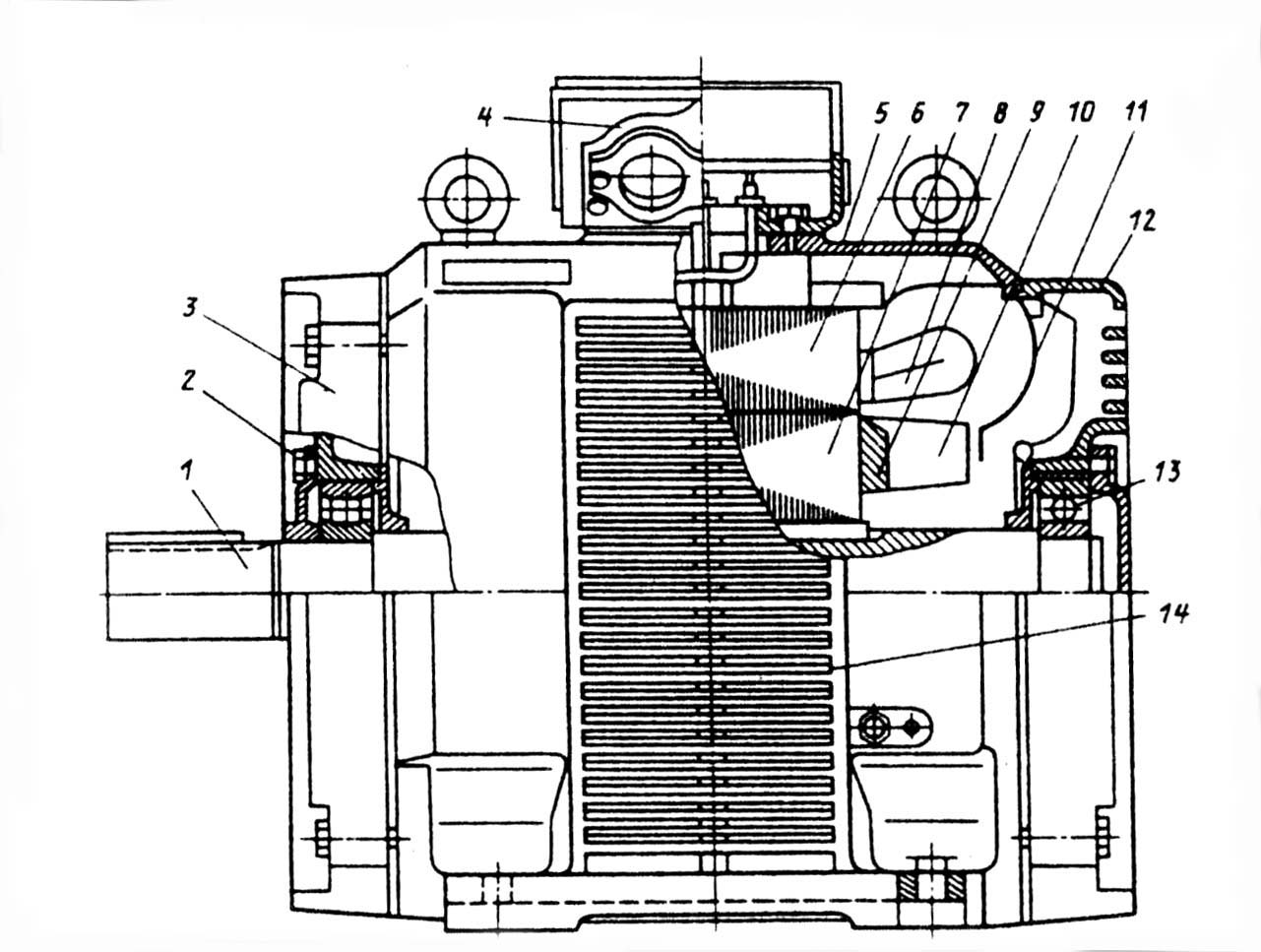
Рис. 9.4. Двигатель серии АИ с короткозамкнутым ротором
со степенью защиты IP23, h = 225 мм:
1 — вал; 2, 13 — подшипники; 3, 12 — подшипниковые шиты; 4 — коробка выводов; 5 — корпус. 6 — сердечник статора; 7 — сердечник ротора; 8 — лобовые части обмотки статора; 9 — короткозамыкающие кольца обмотки ротора; 10 — вентиляционные лопатки ротора; 11 — диффузор; 14 — жалюзи корпуса
достижения номинальной частоты вращения во время всего пускового периода момент и ток двигателя изменялись в определенных пределах (рис. 9.6).
Включение резисторов в цепь ротора используют также для и плавного регулирования частоты вращения. Однако эта возможность ограничена возникновением больших потерь в резисторах, по которым проходит фазный ток ротора. В ряде приводов, например в крановых, такой способ регулирования все же применяют, но в этом случае используют не пусковой, а регулировочный реостат, рассчитанный на длительную работу при больших токах.