Файл: Усовершенствование блока канала нагрузки регулятора уран.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 52
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ ДНР
ГОУ ВПО «ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ№
Кафедра «Горная электротехника
и автоматика им. Р.М. Лейбова»
Пояснительная записка
по курсовому проекту
На тему: «Усовершенствование блока канала нагрузки регулятора УРАН»
Выполнил студент группы АУП-14
Проверил доцент, к.т.н.
Неежмаков С.В.
Донецк – 2017
РЕФЕРАТ
В настоящем курсовом проекте 39 страницы, 7 рисунков, 1 таблица, 16 источников
В работе осуществлен анализ способов регулирования нагрузки очистных комбайнов. Проведен анализ существующих средств регулирования нагрузки очистных комбайнов. А так же разработан блок усовершенствования работы регулятора нагрузки УРАН. Разработаны его алгоритм функционирования, структурная и принципиальная схемы, а также конструктивная разработка блока.
КОМБАЙН, НАГРУЗКА, СКОРОСТЬ ПОДАЧИ, ТОК ЭД, УРАН, СИСТЕМА ПОДАЧИ, РЕГУЛИРОВАНИЕ, ПРИНЦИПИАЛЬНАЯ СХЕМА, ПЕЧАТНАЯ ПЛАТА.
Содержание
| стр. | |
| Введение….…………………………………………………………………… | 4 |
| 1. Характеристика объекта исследований ………………………………….. | 5 |
| 2. Принципы регулирования нагрузки очистных комбайнов..…………….. | 12 |
| 3. Обзор существующих технических решений по автоматизации очистных комбайнов …………………………………………………………. | 20 |
| 4. Разработка алгоритма работы устройства…………...…………………… | 24 |
| 5. Разработка структурной схемы устройства ……………………………… | 26 |
| 6. Разработка электрической принципиальной схемы устройств.………… | 28 |
| 7. Конструктивная разработка устройства………..………………………… | 30 |
| 7.1. Разработка чертежа печатной платы……………………………………. | 30 |
| 7.2 Механическая обработка платы ………….……………………………... | 31 |
| 7.3 Нанесение изображения схемы на плату, травление и заключительная обработка………………………………………………………………….…... | 31 |
| 7.4 Особенности конструктивного выполнения устройства и его подключение …………………………………………………………………. | 32 |
| Выводы………………………………………………………………………… | 34 |
| Список ссылок………………………..……………………………………….. | 35 |
| Приложение А. Блок-схема алгоритма работы БКУ……………………….. | 36 |
Приложение Б. Принципиальная электрическая схема БКУ……………… | 38 |
| Приложение В. Перечень элементов БКУ………………………………….. | 39 |
| Приложение Д. Печатная плата БКУ…………………………..……………. | 40 |
ВВЕДЕНИЕ
Технический прогресс в угольной промышленности связан с дальнейшим широким внедрением средств комплексной автоматизации и автоматизации всех производственных процессов в первую очередь процессов связанных с добычей угля и проведением горных выработок. Среди направлений научно-технического процесса, определяющих перспективы долгосрочного развития экономики, является переход от создания и внедрения систем машин, охватывающих весь технологический процесс.
Автоматизация способствует росту технико-экономических показателей, улучшению производительности машин за счет рационального использования энергетических возможностей привода и совмещения во времени операций; по управлению различными процессами; снижение себестоимости топлива; повышению долговечности оборудования путем снижения уровня и продолжительности перегрузок. Наличие средств индикации и контроля позволяет эксплуатировать машины в номинальных режимах, предотвращает возникновение некоторых аварийных ситуаций, облегчает поиск неисправностей и тем самым сокращает простой, связанный с ремонтом оборудования.
А одной из приоритетных областей автоматизации работы очистных комбайнов является разработка регуляторов их технологических параметров – скорости подачи и нагрузки, и соответственно оптимизация работы машины по этим параметрам. И именно поэтому в качестве объекта исследования данной работы принят регулятор нагрузки типа УРАН для очистных комбайнов со встроенной системой подачи.
1 ХАРАКТЕРИСТИКА ОБЪЕКТА ИССЛЕДОВАНИЙ
Эксплуатация забойных машин, комплексов и агрегатов связана со значительными трудностями, обусловленными их непрерывным перемещением, разнообразными горно-геологическими условиями, пылегазовым режимом шахты, ее микроклиматом и другими факторами. Решение задачи автоматизации забойных машин позволит [1]:
-
повысить производительность машин путем более полного использования мощности их электродвигателей; -
освободить машиниста от функций управления машиной с последующим выводом его из забоя; -
повысить качество добытого угля и снизить его себестоимость; -
улучшить динамические качества машин, их надежность и удлинить срок службы; -
включить забойные машины в подсистему АСУ «Очистные забои».
Вместе с тем автоматическое и дистанционное управление забойным оборудованием улучшает условие труда шахтёров, обеспечивает безопасность и комфортность работ и позволяет обслуживающему персоналу выполнять основные технологические процессы, находясь в закреплённом пространстве на свежей струе воздуха.
Узкозахватный комбайн является основной выемочной машиной при подземной добычи угля. Поэтому проблеме автоматизации забойного оборудования не случайно уделяется большое внимание.
В качестве объекта исследования данной работы выбраны очистные узкозахватные комбайны со встроенной системой подачи типа Г405 типа 2К53М (2К52МУ), 1К101 (1К101У), КШ-1КГ (КШ-1КГУ). Интерес к данной серии комбайном обусловлен их широким применением на угольных шахтах Донбасса. В качестве регулятора нагрузки комбайнов данного типа применяется УРАН.
Рассмотрим более подробно работу системы подачи Г405, поскольку в качестве источника информационного сигнала для разрабатываемого бока усовершенствования работы регулятора нагрузки УРАН используется разработанный автором датчик скорости подачи комбайна. А данный датчик разработан специально для комбайнов с подобной системой подачи.
Данная гидравлическая система подачи обеспечивает автоматическое бесступенчатое регулирование скорости подачи во всем диапазоне ее регулирования. Механизм подачи Г405 состоит из гидромеханической части и электроблока управления [2].
Гидромеханическая часть в свою очередь состоит из:
-
редуктора -
гидравлического вариатора скорости -
системы охлаждения -
автоматического регулятора скорости.
Таблица 1 – Техническая характеристика Г405
| Технические характеристики | Параметры цепи | |
| 23х86 мм | 26х92 мм | |
| Верхний передел диапазона регулирования скорости подачи, м/мин | 6.0 | 4.4 |
| Максимальное тяговое усилие, обусловленное давлением перепуска насоса, кН | 180 | 240 |
| Рабочее тяговое усилие, кН не более | 120 | 160 |
| Рабочая жидкость | Маслоиндустриальное 21-40А с присадкой КП-2 | |
| Масса, кг | 2310 | 2380 |
Гидравлический вариатор скорости включает силовую систему, а также систему управления и подпитки. При нормальной работе вариатора силовая система имеет замкнутую циркуляцию рабочей жидкости, а при срабатывании одного из двух предохранительных гидроклапанов (ПрК1 или ПрК2) она размыкается.
В систему помимо насоса Н типа НП120 и гидромотора ГМ типа ДП510И входят так же маслопроводы 1 и 2, предохранительные ПрК1 и ПрК2 и всасывающие ВК1 и ВК2 гидроклапаны. При включении ЭД – вращается насос Н и нагнетает масло в ГМ по трубопроводу 1 или 2, приводя во вращение его ротор. ГМ через набор зубчатых передач в свою очередь приводит во вращение ведущие звездочки механизма подачи.
Одноплунжерный насос НО гидравлической системы управления и подпитки, приводимый в движение одновременно с Н, засасывает рабочую жидкость из маслоблока 3 через фильтр Ф1 грубой очистки и нагнетает ее через фильтр тонкой очистки Ф2 в трубопровод 4. В точке М поток рабочей жидкости распределяется по трем направлениям:
-
к меньшей цапфе насоса Н, по трубопроводу 7 через гидродроссель Д1; -
к трубопроводу 1 или 2 силовой гидросистемы через подпиточные клапаны ПК1 или ПК2; -
к большой цапфе Н, по трубопроводу 5 через гидрораспределители – реверсивный 3Р и управления ЗУ, гидрозамок Гз, трубопровод 6 и гидродроссель Д2.
Давление рабочей жидкости в трубопроводах 4, 5, 7 и перед Д2 равно 3 – 4 МПа, перед подпорным клапаном подпитки ПпК1 – 0.3 – 0.5 МПа.
При симметричном расположении ротора насоса Н относительно его статора насос не имеет подачи и комбайн не передвигается. В этом случае ЗУ находится в нейтральном положении, а рабочая жидкость от НО через Ф2 идет через подпорные клапаны ПпК1 и ПпК2 на слив.
Р
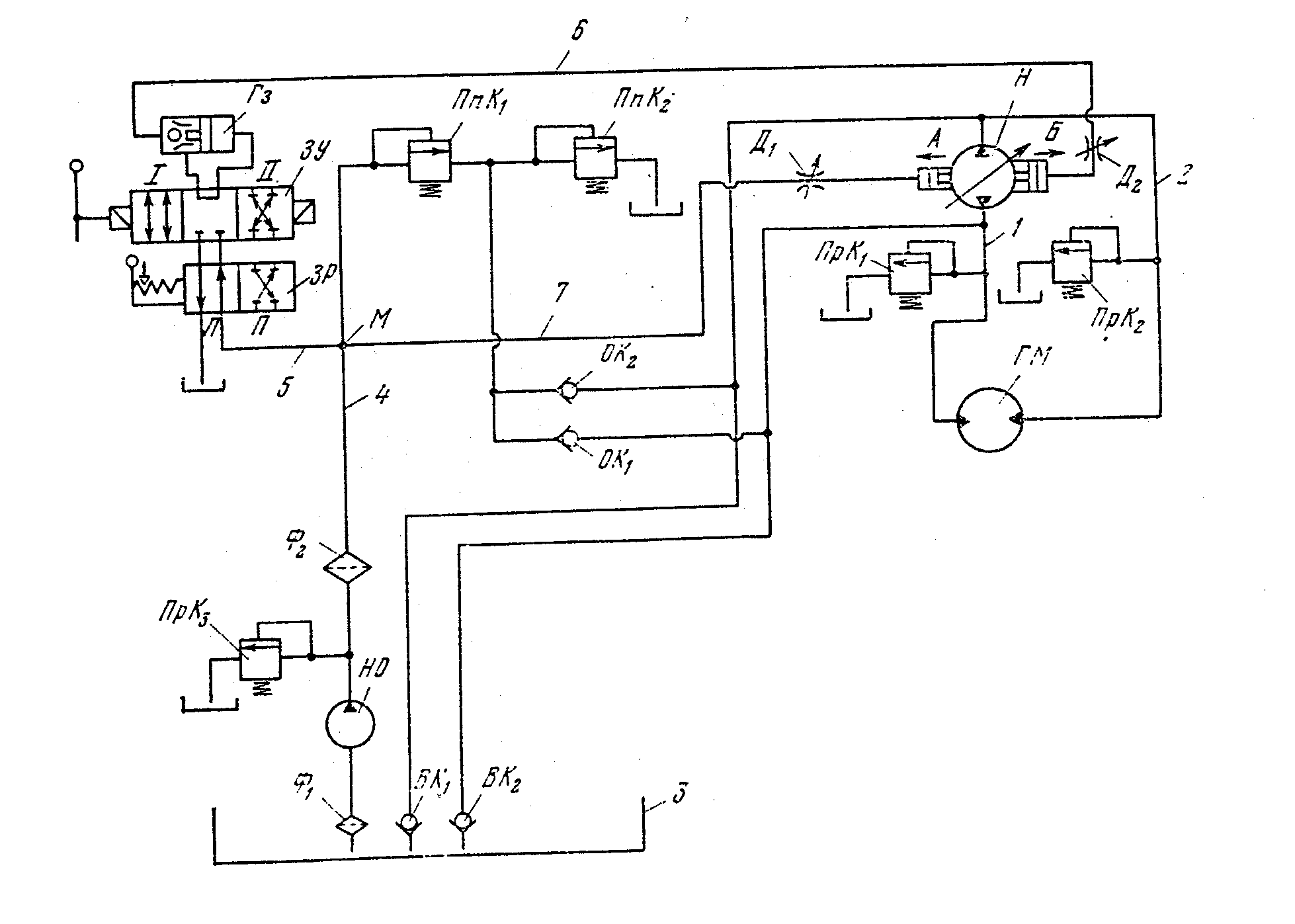
исунок 1 – Гидравлическая схема механизма подачи Г405
Для обеспечения движения комбайна вдоль лавы необходимо переместить статор насоса Н вправо или влево. Для этого 3Р устанавливает в левое положение ^, а ЗУ в положение II. В этом случае рабочая жидкость проходит ЗУ и ЗР и открывает Гз, проходит по трубопроводу 6 и через гидродроссель Д2 поступает в полость большой цапфы статора насоса. Статор при этом будет перемещаться влево, что соответствует увеличению скорости подачи.
Для перемещения статора по стрелке Б→ 3Р устанавливается левое положение, ЗУ – положение 1, при этом рабочая жидкость проходит ЗР и ЗУ, поступает в левую полость гидрозамка Гз и открывает его гидроклапан, соединяя со сливом
полость большой цапфы, а так как давление в полости меньшей цапфы сохраняется, то статор будет перемещаться вправо – обеспечивая снижение скорости подачи.
Подпитка Н осуществляется под давлением, на которое настраивается подпиточный клапан ПпК2. Рабочая жидкость из переходника (точка М) через ПпК1 и один из обратных клапанов ОК1 или ОК2 поступает во всасывающую полость насоса.
Для обеспечения работы комбайна с максимально возможной мощностью, двигателя Г405 оснащен системой автоматического управления САДУ2
Общая схема Г405 (см. рис. 2) – гидромеханический привод 24, электроблок 28. В гидромеханическом приводе находится радиально поршневой насос 18 и гидромотор 11, двухступенчатый редуктор т две приводные звезды для цепи, регулятор режима работы УРАН.
Насос 18 трубопроводами 16 и 20 соединен со вставкой 21, которая вварена в корпус 17. Каполы во вставке соединяют трубопроводы 16 и 20 со входами ГМ 11. Фильтр 15 тонкой очистки установлен поперек механизма перемещения и может очищаться с любой стороны. Ввод и вывод цепи осуществляется с помощью ручьев 22 и 25 и отклоняющих роликов 23.
Редуктор Гмех привода состоит из вал-шестери 13, блока шестерен 12 и двух выходных валов, на каждом из которых установлены зубчатое колесо 10 и цепная звезда 9. Вал-шестерня 13 соединена с ГМ 11 зубчатой муфтой, которая расположена внутри вал-шестерни. Блок шестерен 12 установлен на оси. В боковой камере Гмех редуктора находятся датчик скорости перемещения 19 и фильтр системы орошения.
Во взрывобезопасной камере электроблока 28 располагаются: реверсивный комбайновый выключатель 30 типа «УРАН», проходные зажимы 26 для присоединения кабелей, кнопок «СТОП» с фиксацией, фары и др.
На стенке электроблока установлены: штепсельный ввод 1, рукоятка 2 ВРК2, пульт управления 4, электрогидроблок 6, с установленным на нем электрогидрораспределителем 5 типа РП2, коробка 3 для подключения кабелей р
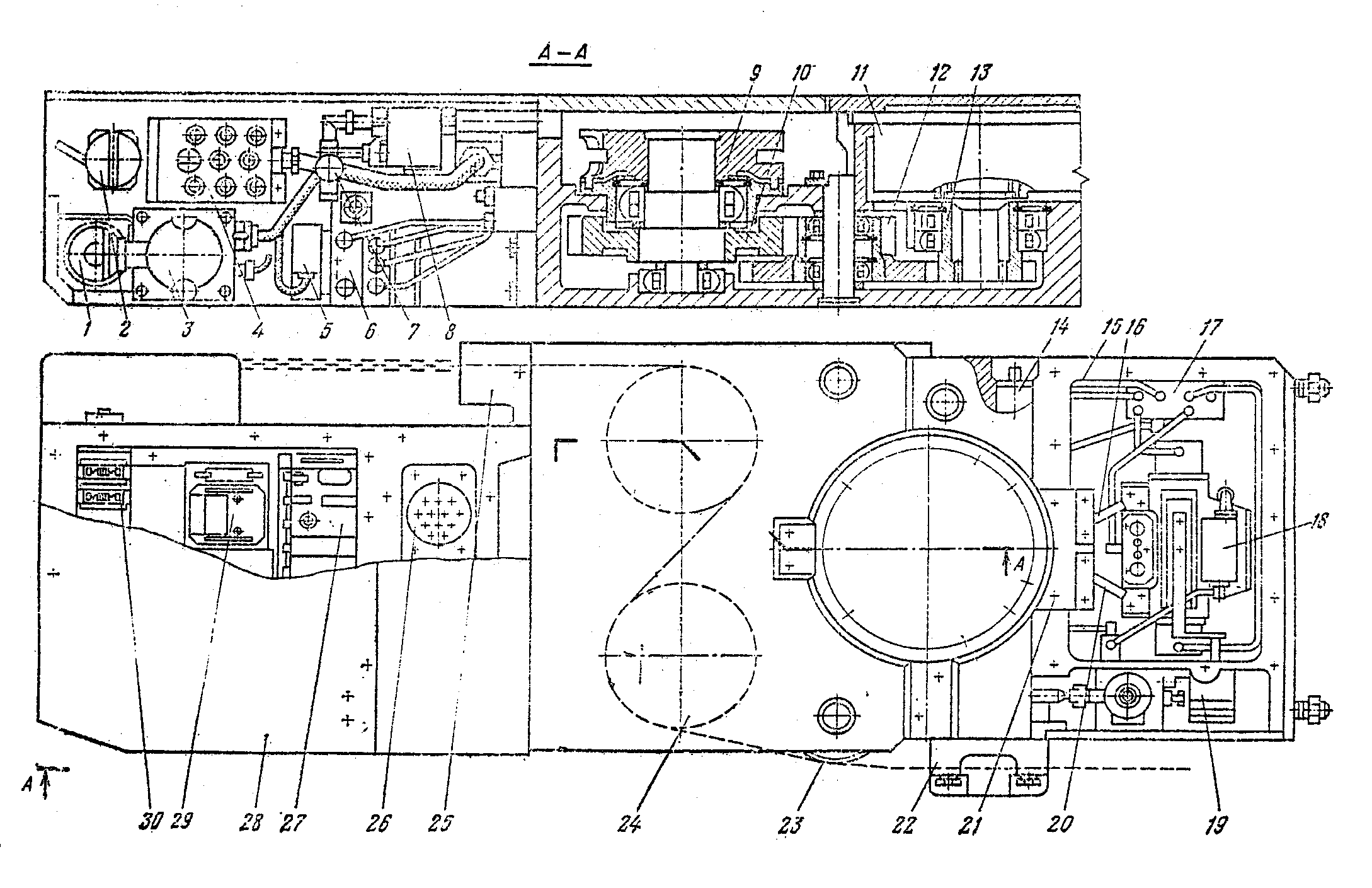
егулятора «УРАН», кран включения комбайна 7 и реле контроля 8.
Рисунок 2 – Гидравлический механизм перемещения 1Г405.
Таким образом комбайн перемещается по раме забойного конвейера при помощи цепи и приводной звезды. Круглозвенная цепь 7 растянута вдоль забойного конвейера 3 и перекреплена по концам к его головкам при помощи оси 1 и вертмога 2. Во встроенном механизме перемещения 10 цепь, огибая звезды 5 и 6 проходит через ручьи 4 и 9, каждый ручей имеет крестообразное отверстие, проходя которое, цепь правильно ориентируется относительно звезд. Отклоняющий ролик 8 отводит цепь от корпуса механизма перемещения.