ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 50
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
пневматические; гидравлические; электрические; электрогидравлические.
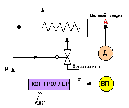
Рассмотрим смысл закона регулирования регулятора на примере САР температуры целевого продукта в теплообменнике. Эта схема нам уже известна. Это САР по отклонению. Здесь σ – сигнал рассогласования 90º – 100º = –10 ºС = σ. Закон регулирования регулятора (контроллера) определяет характер перемещения затвора регулирующего органа в новое положение.
На место регулятора (контроллера) в данной схеме будем поочередно ставить линейные регуляторы и будем наблюдать, как регулирующее воздействие μ от каждого закона регулирования влияет на характер перемещения затвора регулирующего органа.
Классификация линейных регуляторов
-
П-регулятор (пропорциональный); -
И-регулятор (интегральный); -
ПИ-регулятор (пропорционально-интегральный (изодромный)); -
Регуляторы с предварением (с опережением):
-
ПД-регулятор (пропорционально-дифференциальный); -
ПИД-регулятор (пропорционально-интегрально-дифференциальный).
Из нелинейных регуляторов самый популярный позиционный регулятор.
Заключение
Автоматические регуляторы, помимо высокой надежности, должны обладать высокой чувствительностью к изменениям входного сигнала, необходимой для точного поддержания регулируемых величин вблизи заданного значения. Для этого в составе регулятора предусматривается специальное измерительное устройство. Кроме того, автоматический регулятор должен развивать на выходе усилие, необходимое для перемещения регулирующих органов (клапанов, задвижек, шиберов), т. е. содержать в своей структуре достаточно мощный исполнительный механизм (сервопривод).
Для реализации выбранного закона регулирования и изменения параметров настройки регулятора в необходимых пределах в его состав должны входить устройства формирования закона регулирования и изменения (коррекции) параметров настройки. Необходимо также иметь возможность изменения в широких пределах заданного значения регулируемой величины, с которым сравнивается ее текущее значение. Это требование предусматривает наличие задатчика ручного или автоматического управления (ЗУ) в составе регулятора. Выполнение перечисленных требований возможно лишь при использовании автоматических регуляторов непрямого действия.
Список литературы
Плетнев Г.П. Автоматическое управление и защита теплоэнергетических установок электростанций: Учебник для техникумов. – 3-е изд., перераб. – М.: Энергоатомиздат, 2003.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд-во «Наука», 2005.
Михайлов В.С. Теория управления. – К.: высш. шк. Головное изд-во,2008.
Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. И доп. – К.: высш. шк. Головное изд-во, 2010.
Теория автоматического управления. / Под ред. А.В. Нетушила - М.: Высшая школа, 2002. . Бессекерский В.А., Попов В.П. Теория автоматического регулирования. - М.: Наука, 1975. Шавров А.В., Коломиец А.П. Автоматика. - М.: Колос, 2009. Клюев А.С. Автоматическое регулирование. - М.: Энергия, 2003. Основы автоматического регулирования и управления. /Под ред. В.М. Пономарева и А.Н. Литвинова. - М; Высшая школа, 2004.