ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 48
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
1
МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО
ОБРАЗОВАНИЯ РЕСПУБЛИКИ УЗБЕКИСТАН
ТАШКЕНТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ИМЕНИ ИСЛАМА КАРИМОВА
Факультет «Электроника и автоматика»
Кафедра «Автоматизация производственных процессов»
САМОСТОЯТЕЛЬНАЯ РАБОТА
на тему: Регуляторы
Выполнил студент: гр. 156-Махамедов Улугбек
Направление: 5311000-Автоматизация и управление технологическими процессами и производствами (химическая, нефтехимическая и пищевая промышленность)
Проверила: доцент Шамсутдинова В.Х
2023
Содержание
Введение…………………….……………………………………………………3
Структуры типовых регуляторов……………………………………………….4
1. П-регулятор……………………………………………………………………4
2. ПД-регулятор………………………………………………………………….5
3. ПИ-регулятор………………………………………………………………….7
4. ПИД-регулятор………………………………………………………………..10
5.Законы регулирования: п,и,пи,пд,пид-регуляторы. Их достоинства и недостатки (на примере сар температуры теплообменника)…………..…….13
6.Запаздывание в объектах и регуляторах……………………………………..15
Заключение………………………………………………………………………18
Список литературы………………………………………………………………19
Введение
Каждый контур регулирования обобщенно можно рассматривать как систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта.
Каждый регулятор можно охарактеризовать:
– законом, на основе которого осуществляется регулирование;
– типами входных сигналов (первичных датчиков);
– типами выходных сигналов управления (исполнительных устройств);
– способом задания установки регулирования;
– дополнительными возможностями (дополнительные функции, дополнительные входы/выходы).
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные и пропорционально-интегрально-дифференциальные регуляторы — сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы.
Рассмотрим структурные схемы автоматических регуляторов с типовыми сервоприводами, воспроизводящие основные законы регулирования методом параллельной и последовательной коррекции.
Структуры типовых регуляторов
1. П-регулятор
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
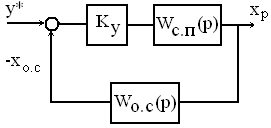
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
Wр(р) = 1 ⁄ W о.с (р); Wр (iщ) = 1 ⁄ Wо.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора xр = Kрy*, необходимо выполнить условие:
W о.с (р) = Xо.с (р) ⁄ xр (р) = 1 ⁄ Kр (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи kо.с = д = 1 ⁄ Kр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
П-регуляторы имеют орган настройки для изменения д (Kр), который служит параметром его настройки. Переходная характеристика реального П-регулятора (рис. 2) несколько отличается от идеального в начальной своей части из-за ограниченной скорости сервопривода.
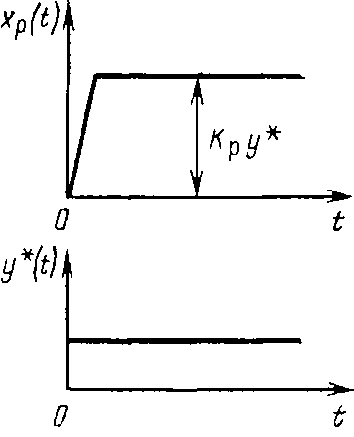
Рис. 2. Кривая переходного процесса П-регулятора
2. ПД-регулятор
Функциональная схема ПД-регулятора представлена на рис. 3, а. Дифференцирующая составляющая формируется специальным прибором — дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины.
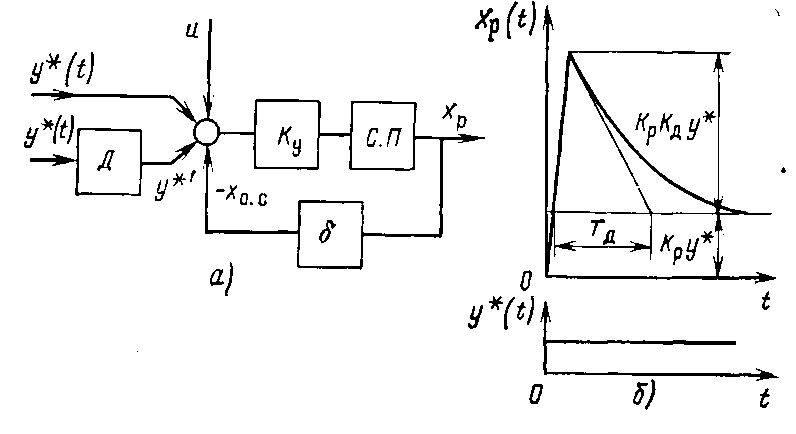
Рис. 3. ПД-регулятор: а — структурная схема; б — кривая переходного процесса
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель— привод — обратная связьформируется П-закон регулирования с коэффициентом усиления Kр. Динамическая характеристика реального ПД-регулятора имеет вид
Переходная (временная) характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3, б и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора служит Kр (степень обратной связи д); параметрами настройки дифференциатора служат коэффициент усиления Кд и постоянная дифференцирования Тд, произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
3. ПИ-регулятор
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура
(Ky—Wo.c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
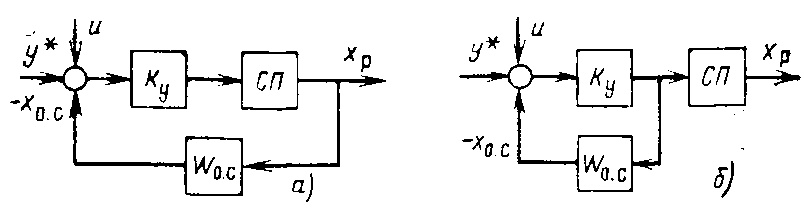
Рис. 4. Структурные схемы ПИ-регуляторов:
а — сервопривод охваченООС;б— сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора

Если принять Тд=Ти и Kр=1/Kд, получим
т
 .е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениямиВ промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
Wp(p) = WКУУ
(p)Wс.п(p), (3.3), где WКУУ(p) = 1 ⁄ Wо.с (р).
При использовании сервопривода с передаточной функцией интегрального звена Wс.п(p) = 1⁄ TР передаточная функция регулятора имеет вид
При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/Wо.с(р) = WКУУ(р) = Kр (1+TР) (3.5)
что обеспечивает обратная связь с оператором
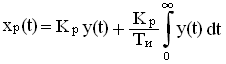
Wо.с(р) = Kо.с/(1+TР) = д/(1+TР) (3.6)
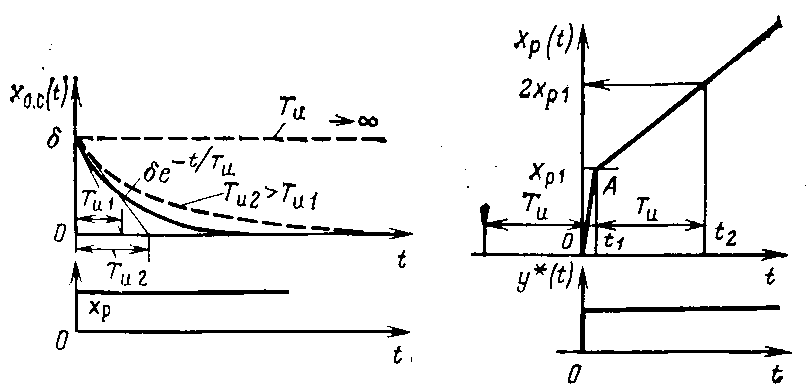
Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
Последнее уравнение служит оператором инерционного звена первого порядка. При охвате Ку такой обратной связью оператор регулятора в целом имеет вид
Wр(р) = Kр(1+1/TиР)
Параметрами настройки ПИ-регулятора служат Kр