ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 51
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
и Ти.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), Wо.c(p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Ти численно равна подкасательной Тд к переходной кривой реального дифференцирующего звена (рис. 5).
Промышленные регуляторы имеют специальные приспособления— органы настройки для изменения Kр(д) и Ти в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения Кр и Tи можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
Kр = xр1/y* (3.7)
а Ти численно равно времени, необходимому для перемещения выходного вала сервопривода из положения xр1 до его удвоенного значения 2хр1. Отсюда второе название Tи — время удвоения выходного сигнала ПИ-регулятора xр
при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что Кр/Ти определяет степень ввода интегральной составляющей в ПИ-закон регулирования
Действительно, при безграничном увеличении Ти второй член в п оследнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
оследнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
4. ПИД-регулятор
Закон регулирования
Wр(р) = Kр+Kр/TиР+KдTдР (4.1)
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
При последовательной коррекции


Где

При параллельной коррекции

Где

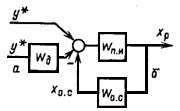
Рис. 7. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена
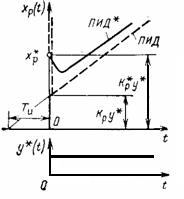
Рис. 8. Переходные характеристики ПИД-регуляторов
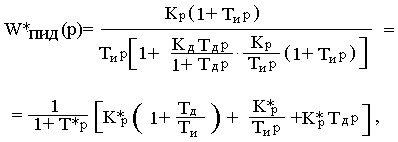
ПИД-регулятор имеет четыре параметра настройки: Kр, Tи, Tд и Kд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры настройки реального ПИД-регулятора K*р и T* можно определить по формулам (4.2) (4.3).
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x*р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
П-регулятор - Это регулятор, у которого μ пропорционально σ, т.е.μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ - положение скачком (рис.2.10).
Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор Это регулятор, у которого μ пропорционально интегралу σ
При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).

Рис.2.11. Закон регулирования И-регулятора.
Достоинство:отсутствие остаточного отклонения регулируемого параметра от зад-го знч-я.
Недостаток: низкая скорость рег-я, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор – это параллельное соединение
предыдущих двух регуляторов (П и И - регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
 ,где: К, Ти – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И - закону.
,где: К, Ти – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И - закону.

Рис.2.12. Закон регулирования ПИ-регулятора
Регуляторы с предварением
ПД-регулятор - это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е. .
.
 Рис.2.13. Закон регулирования ПД-регулятора.
Рис.2.13. Закон регулирования ПД-регулятора.
Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор.
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
 .
.
Здесь: К, Ти, Тд – параметры настройки, которые можно настроить вручную.
 Рис.2.14. Закон регулирования ПИД-регулятора.
Рис.2.14. Закон регулирования ПИД-регулятора.
ПИД - закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И – закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
В реальных объектах (регуляторах) изменение регулируемого параметра начинается не сразу после нанесения возмущения, а спустя некоторое время. Это время называют запаздыванием. Различают 2 вида запаздывания: чистое (транспортное) – τ0; ёмкостное - τё.
В одноёмкостном объекте имеется только чистое запаздывание τ0. Оно вызывается наличием в регулируемом объекте участков, по которым распространение сигнала требует некоторого времени.
В многоёмкостном, (двух и более объектов), кроме чистого имеется еще и ёмкостное запаздывание τё. Оно обусловлено гидравлическими тепловыми и другими сопротивлениями. Эти сопротивления вызывают замедленный переход вещества из одной емкости в другую.
Рассмотрим динамическую характеристику одноёмкостного объекта с самовыравниванием с учётом запаздывания (рис. 2.9).
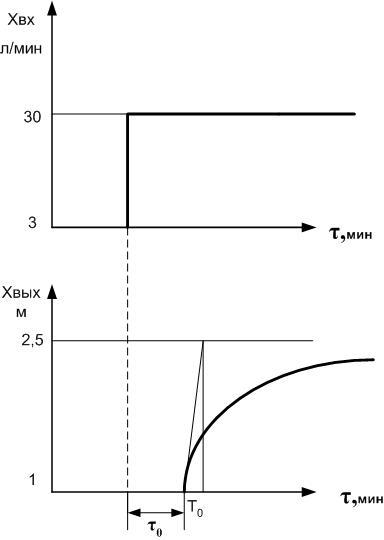
Рис. 2.9. Динамическая характеристика одноёмкостного объекта с самовыравниванием с учётом запаздывания.
Как следует из рис.2.9 кривая разгона смещается вправо на время чистого (транспортного) запаздывания τ0
Рассмотрим влияние ёмкости объекта на величину постоянной времени То. Возьмём одну и ту же порцию тепла и забросим её в лекционный зал, а затем её же в собачью будку. Считаем, что температуры в этих помещениях вначале были одинаковы. Так как объём будки меньше ёмкости зала, то в будке температура установится быстрее, чем в зале. Кроме того, установившаяся температура в будке будет выше, чем установившаяся температура в зале при одной и той же заброшенной порции тепла. При построении динамических характеристик этих помещений получим То будки < То зала (рис.2.5). Следовательно, чем меньше ёмкость объекта, тем меньше постоянная времени То.
 Рис. 2.5. Динамические характеристики объектов c самовыравниванием.
Рис. 2.5. Динамические характеристики объектов c самовыравниванием.
17. Автоматический регулятор – это совокупность устройств, при помощи которых автоматически поддерживается значение регулируемой величины с той или иной точностью по отношению к заданному значению. По роду используемой энергии регуляторы подразделяют на:
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), Wо.c(p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Ти численно равна подкасательной Тд к переходной кривой реального дифференцирующего звена (рис. 5).
Промышленные регуляторы имеют специальные приспособления— органы настройки для изменения Kр(д) и Ти в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения Кр и Tи можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
Kр = xр1/y* (3.7)
а Ти численно равно времени, необходимому для перемещения выходного вала сервопривода из положения xр1 до его удвоенного значения 2хр1. Отсюда второе название Tи — время удвоения выходного сигнала ПИ-регулятора xр
при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что Кр/Ти определяет степень ввода интегральной составляющей в ПИ-закон регулирования
Действительно, при безграничном увеличении Ти второй член в п
оследнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).4. ПИД-регулятор
Закон регулирования
Wр(р) = Kр+Kр/TиР+KдTдР (4.1)
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
При последовательной коррекции
Где
При параллельной коррекции
Где
Рис. 7. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена
Рис. 8. Переходные характеристики ПИД-регуляторов
ПИД-регулятор имеет четыре параметра настройки: Kр, Tи, Tд и Kд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры настройки реального ПИД-регулятора K*р и T* можно определить по формулам (4.2) (4.3).
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x*р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
Законы регулирования: п, и, пи, пд, пид-регуляторы. Их достоинства и недостатки (на примере сар температуры теплообменника)
П-регулятор - Это регулятор, у которого μ пропорционально σ, т.е.μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ - положение скачком (рис.2.10).
Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор Это регулятор, у которого μ пропорционально интегралу σ
При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).
Рис.2.11. Закон регулирования И-регулятора.
Достоинство:отсутствие остаточного отклонения регулируемого параметра от зад-го знч-я.
Недостаток: низкая скорость рег-я, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор – это параллельное соединение
предыдущих двух регуляторов (П и И - регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
Рис.2.12. Закон регулирования ПИ-регулятора
Регуляторы с предварением
ПД-регулятор - это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е.
Рис.2.13. Закон регулирования ПД-регулятора.Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор.
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
Здесь: К, Ти, Тд – параметры настройки, которые можно настроить вручную.
Рис.2.14. Закон регулирования ПИД-регулятора.ПИД - закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И – закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
Запаздывание в объектах и регуляторах
В реальных объектах (регуляторах) изменение регулируемого параметра начинается не сразу после нанесения возмущения, а спустя некоторое время. Это время называют запаздыванием. Различают 2 вида запаздывания: чистое (транспортное) – τ0; ёмкостное - τё.
В одноёмкостном объекте имеется только чистое запаздывание τ0. Оно вызывается наличием в регулируемом объекте участков, по которым распространение сигнала требует некоторого времени.
В многоёмкостном, (двух и более объектов), кроме чистого имеется еще и ёмкостное запаздывание τё. Оно обусловлено гидравлическими тепловыми и другими сопротивлениями. Эти сопротивления вызывают замедленный переход вещества из одной емкости в другую.
Рассмотрим динамическую характеристику одноёмкостного объекта с самовыравниванием с учётом запаздывания (рис. 2.9).
Рис. 2.9. Динамическая характеристика одноёмкостного объекта с самовыравниванием с учётом запаздывания.
Как следует из рис.2.9 кривая разгона смещается вправо на время чистого (транспортного) запаздывания τ0
16. Влияние ёмкости объекта на величину постоянной времени
Рассмотрим влияние ёмкости объекта на величину постоянной времени То. Возьмём одну и ту же порцию тепла и забросим её в лекционный зал, а затем её же в собачью будку. Считаем, что температуры в этих помещениях вначале были одинаковы. Так как объём будки меньше ёмкости зала, то в будке температура установится быстрее, чем в зале. Кроме того, установившаяся температура в будке будет выше, чем установившаяся температура в зале при одной и той же заброшенной порции тепла. При построении динамических характеристик этих помещений получим То будки < То зала (рис.2.5). Следовательно, чем меньше ёмкость объекта, тем меньше постоянная времени То.
Рис. 2.5. Динамические характеристики объектов c самовыравниванием.17. Автоматический регулятор – это совокупность устройств, при помощи которых автоматически поддерживается значение регулируемой величины с той или иной точностью по отношению к заданному значению. По роду используемой энергии регуляторы подразделяют на: