Добавлен: 10.11.2023
Просмотров: 780
Скачиваний: 48
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
1.1.4. Устойчивость
Оценочными показателями устойчивости, определяемыми в данной курсовой работе, являются: скорость vбук, максимально допустимая при прямолинейном движении автомобиля без пробуксовки ведущих колес;
максимально возможная (критическая) скорость vопр, с которой можно вести автомобиль без угрозы опрокидывания; максимально допустимый (критический) угол опр косогора, по которому автомобиль может двигаться
без опрокидывания; максимальный угол подъема бук, при котором возможно равномерное движение автомобиля без буксования ведущих колес.
Скорость vбук [м/с], максимально допустимая при прямолинейном движении автомобиля по горизонтальной дороге без пробуксовки ведущих колес, определяется на каждой передаче (с учетом найденного ранее по формуле (4) максимального ускорения jmax):
 , (9)
, (9)где f – коэффициент сопротивления качению, определяемый по рисунок – 4




Скорость vбук уменьшается при уменьшении коэффициента сцепления, росте сопротивления дороги, а также при увеличении ускорения. Поэтому потеря курсовой устойчивости автомобилем наиболее вероятна на участках дороги со скользким неровным покрытием (укатанный снег, обледенелый асфальтобетон, булыжник) и подъемами. Если при прохождении подъема "с ходу" встретится участок, покрытый снежной или ледяной коркой, то даже небольшая поперечная сила может вызвать боковое скольжение заднего моста.
Поперечную устойчивость при криволинейном движении характеризует максимально возможная (критическая) скорость vопр, с которой можно вести автомобиль без угрозы опрокидывания по горизонтальному участку.
Рассмотрим схему движения автомобиля на повороте (рисунок 3).
Примем для простоты, что автомобиль является плоской фигурой, а увод и скольжение колес отсутствуют. Мгновенный центр О скоростей (центр поворота) автомобиля располагается в точке пересечения перпендикуляров к векторам скоростей средних точек мостов. При отсутствии увода и скольжения колес вектор скорости середины заднего моста параллелен плоскостям задних колес, поэтому точка О находится на продолжении оси заднего моста.
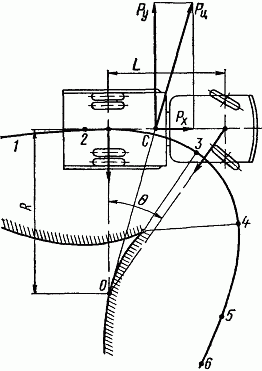
Рисунок 3 - Схема поворота автомобиля.
Скорость vопр определяем по формуле:
где – угол поворота управляемых колес (в курсовой работе принимается менее 0,349 рад);
R – расстояние от точки О до середины заднего моста; при 0,349 рад (20°):
R = L/tg L/,
R = 2,424/0,349=6,945
Определим величину максимально допустимого (критического) угла косогора, по которому автомобиль может двигаться без опрокидывания по прямолинейному участку (R = ):
Устойчивость автомобиля против опрокидывания возрастает с увеличением колеи В автомобиля и радиуса R, а также при снижении центра тяжести и уменьшении угла косогора. Отношение В/(2hц) называют коэффициентом поперечной устойчивостипоп.
Продольную устойчивость характеризует максимальный угол подъема бук, по которому автомобиль может двигаться без буксования. Выражение для определения бук, при котором возможно равномерное движение автопоезда без буксования ведущих колес тягача, имеет вид:
где Gпр – вес прицепа, Н; hпр – высота сцепного устройства, м.
Чем меньше величина х и чем больше масса прицепа по сравнению с массой тягача, тем меньше бук. Так, на дорогах с обледенелым покрытием буксование может наступить при бук = 2–3°, т. е. на относительно пологих подъемах.
Для одиночного автомобиля (типа 2х1) Gпр = 0:
Для автомобиля со всеми ведущими мостами:
tgбук = х. (14)
Такие автомобили могут преодолевать без потери продольной устойчивости весьма крутые подъемы даже при мокром и скользком покрытии.
1.1.5. Управляемость
Управляемостью называют способность автомобиля устойчиво сохранять заданное направление движения и вместе с тем быстро изменять его при воздействии водителя на рулевое управление.
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основных причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
При наличии увода автомобиль может двигаться криволинейно, даже если угол поворота управляемых колес равен 0. Кривизна траектории зависит от соотношения 1 и 2 (углы увода переднего и заднего мостов).
Если 1 = 2, то шинную поворачиваемость автомобиля называют нейтральной. Хотя при этом траектория движения автомобиля о жесткими шинами не совпадает о траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают различные положения.
Если 1 > 2, то для движения автомобиля с эластичными шинами по кривой управляемые колеса нужно повернуть на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют недостаточной. Автомобиль с недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное направление движения.
Если угол 1 < 2, то для движения автомобиля с эластичными шинами по кривой управляемые колеса нужно повернуть на меньший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют излишней. Автомобиль с недостаточной поворачиваемостью более устойчив и лучше сохраняет направление движения, чем автомобиль с излишней поворачиваемостью.
Креновая поворачиваемость автомобиля связана с конструкцией его подвески. Рассмотрим задний мост с рессорной подвеской автомобиля, который совершает правый поворот. Передние концы рессор соединены с кузовом простым шарниром, а задние – с помощью серьги. При прогибах рессоры задний мост перемещается по дуге, причем ось его качания расположена около шарнира. Под действием поперечной силы кузов автомобиля наклоняется, вызывая сжатие левых рессор и распрямление правых. Левая рессора, сжимаясь,
перемещает задний мост назад, а правая, распрямляясь, перемещает его вперед. В результате задний мост поворачивается в горизонтальной плоскости.
Если углы поворота переднего и заднего мостов не одинаковы по величине или направлению, то автомобиль вследствие крена поворачивается, хотя передние колеса остаются в нейтральном положении. Так, при действии
одной и той же возмущающей силы Руавтомобиль А (рис. 6) повернется вправо, а автомобиль Б – влево. Возникающая при повороте центробежная сила Рц у автомобиля А направлена в противоположную сторону по сравнению с возмущающей силой Ру, а у автомобиля Б в ту же сторону. Поэтому автомобиль А лучше сохраняет направление движения под действием поперечных возмущающих сил. По аналогии с шинной поворачиваемостью можно сказать, что автомобиль А имеет недостаточную, а автомобиль Б излишнюю креновую поворачиваемость.
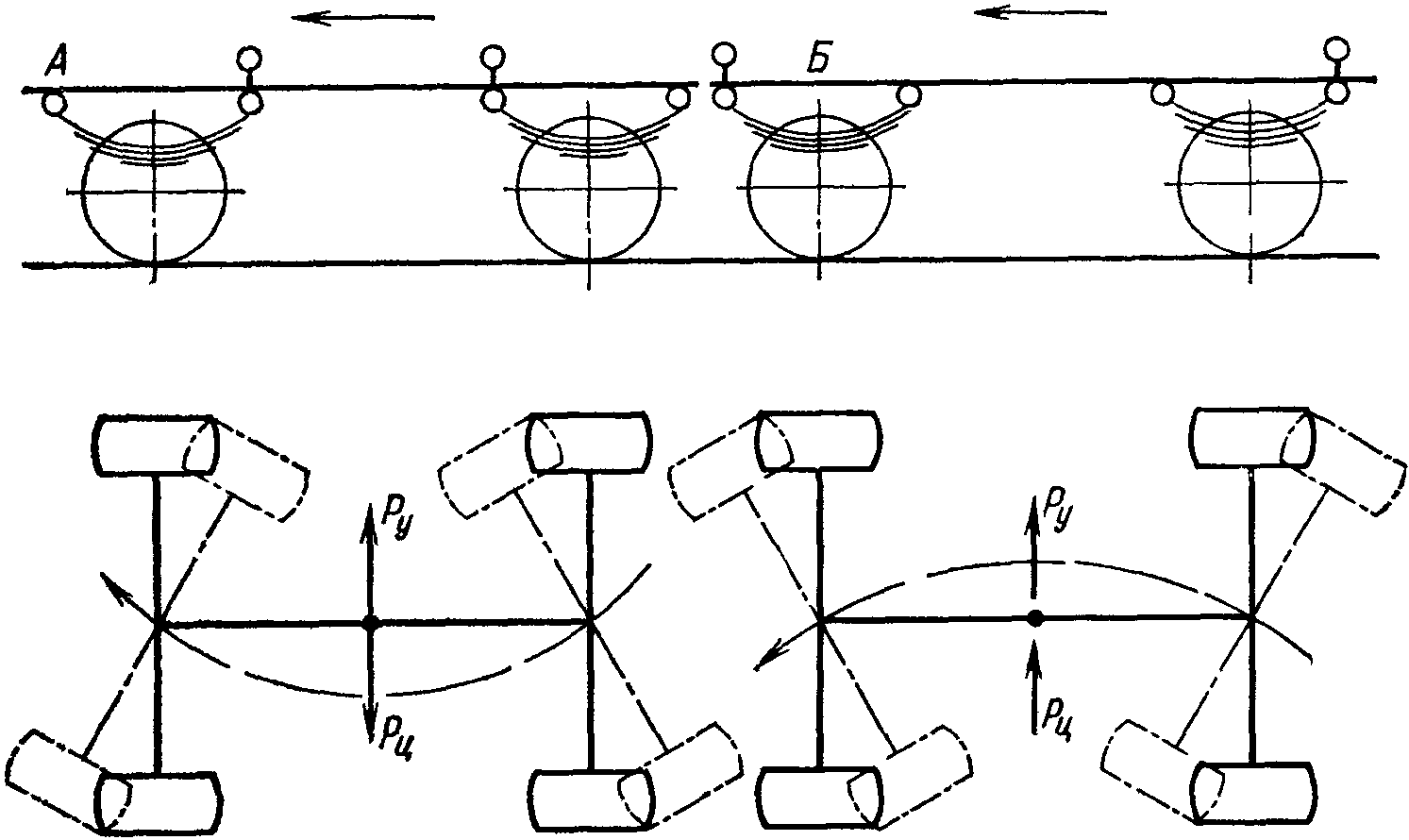
Рисунок 4 - Схемы движения автомобилей с зависимой рессорной подвеской, имеющих различную креновую поворачиваемость
Креновая поворачиваемость автомобиля тесно связана с шинной поворачиваемостью, так как увод колеса возникает не только под действием сил и моментов, но и при наклоне колеса к вертикали (развале). Если направление поперечной силы совпадает с направлением развала колеса, то увод возрастает. Развал колеса, равный 1°, вызывает увод на угол 10–20'. У автомобилей с независимой подвеской колес на поперечных рычагах крен кузова вызывает изменение развала колеса. При двухрычажной подвеске (рисунок 4, а) колеса наклоняются в сторону крена кузова в направлении действия поперечной силы Ру, что увеличивает угол увода моста. При однорычажной подвеске (рисунок 4, б) колеса наклоняются в сторону, противоположную крену кузова, навстречу поперечной силе. В этом случае угол увода моста уменьшается. Таким образом, в зависимости от конструкции подвески, креновая поворачиваемость может либо усиливать, либо ослаблять влияние шинной поворачиваемости.
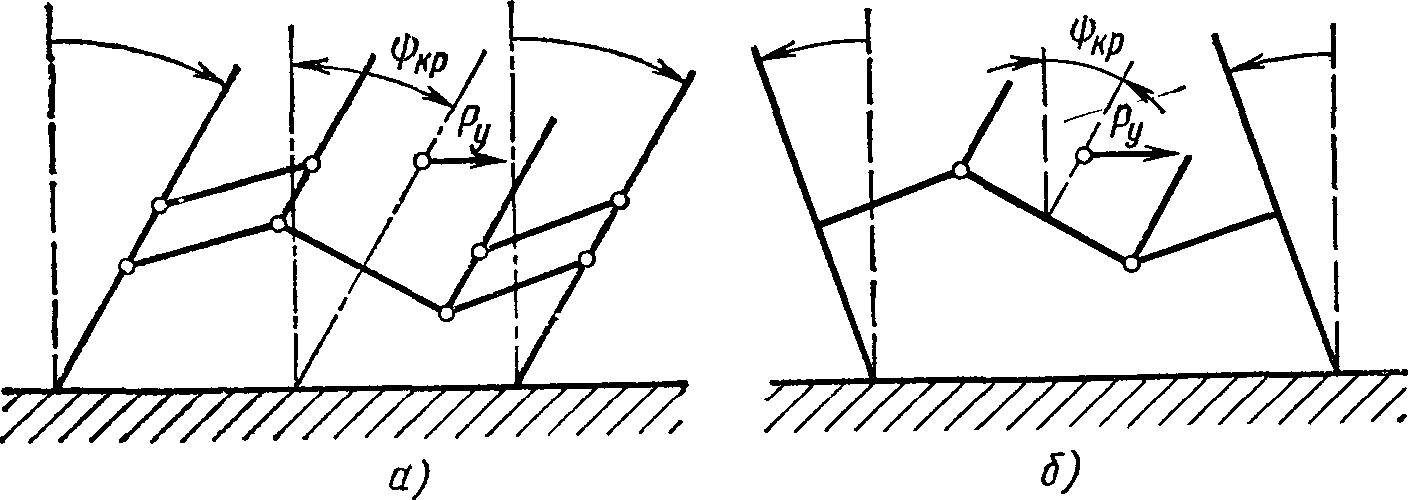
Рисунок 5 - Схемы движения автомобилей с независимой рычажной подвеской, имеющих различную креновую поворачиваемость