ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17247
Скачиваний: 51
succeeding halving of diameter produces a microphone with twice the
HF bandwidth capability of the preceding one. Fortunately, the ear’s
sensitivity to low frequencies is diminished at low levels, as indicated by
the weighting curves shown in Figure 3–16.
The curves show a rise below about 1 kHz of approximately 10 dB
per decade with decreasing frequency. This rise is usually referred to as
1/f noise (inversely proportional to frequency) and is primarily a prop-
erty of the electronics. The flattening of the spectrum and eventual slight
upturn at HF largely is the result of the capacitor element itself and the
reflection of its mechano-acoustical resistance into the electrical domain.
Newer electronics have reduced l/f noise considerably; however, this
is a minor improvement when we consider the relative insensitivity of the
ear to low frequencies at low levels. Typical microphone preamplifier
output noise spectra are shown in Figure 3–17.
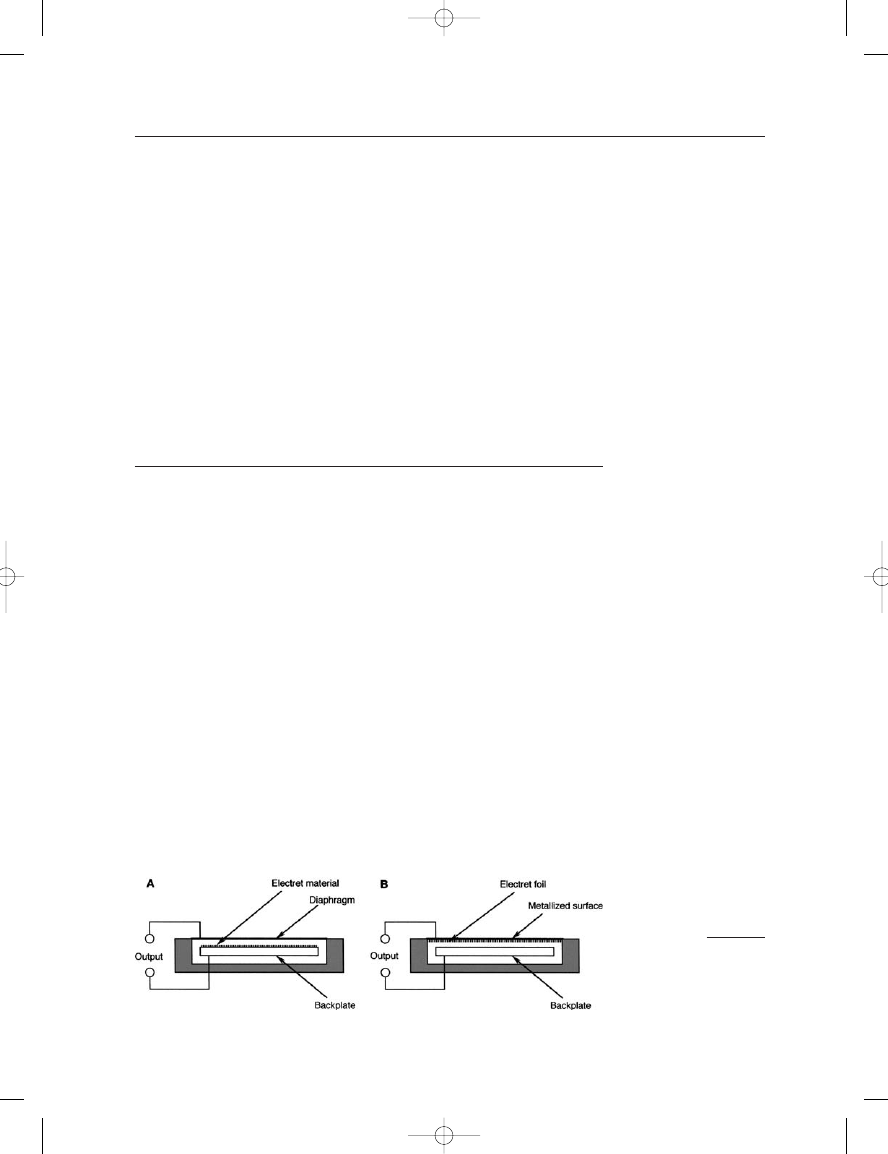
THE ELECTRET CAPACITOR PRESSURE MICROPHONE
Electret materials have been known for more than a century, but only in
the last 35 years or so has the electret had an impact on capacitor micro-
phone design, bringing excellent performance to very low-cost models.
The electret is a prepolarized material, normally polytetrafluoroethylene,
which has been given a permanent electrostatic charge through place-
ment in a strong electric field and under heat. As the heat is withdrawn,
the electric charge remains. The material is virtually the electrostatic
equivalent of a permanent magnet, and if a capacitor backplate is coated
with one of the newer electret materials, the resulting microphone will
have the same performance characteristics as a standard capacitor cap-
sule with an effective polarizing value of about 100 V. Figure 3–18A
shows a section view of a capacitor capsule using an electret backplate.
Alternatively, an electret diaphragm can be used, as shown in
Figure 3–18B. One drawback here is that the metallized electret foil has
somewhat greater mass per unit area than typical non-electret diaphragm
materials, possibly compromising HF response.
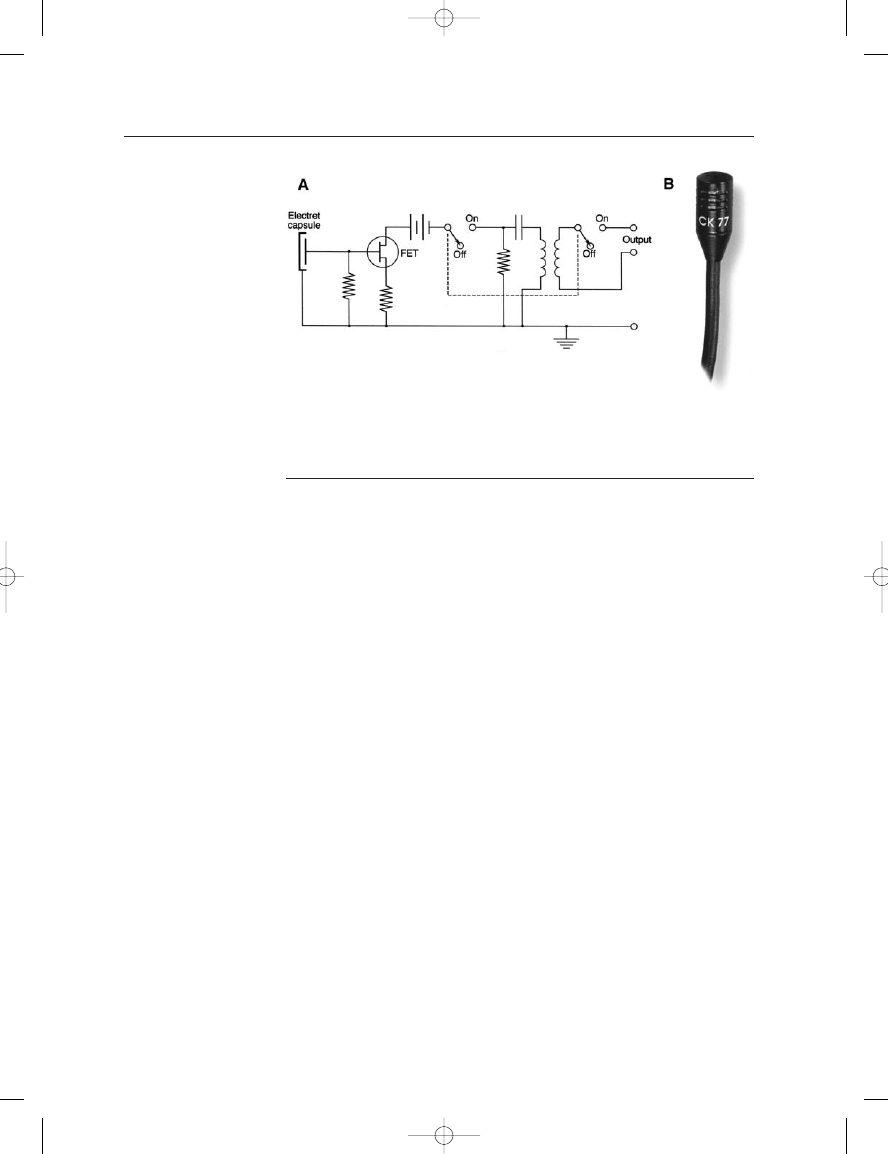
Figure 3–19A shows a typical electrical implementation of the elec-
tret; note the simplicity of the design. A photograph of a small electret
microphone is shown in Figure 3–19B.
THE MICROPHONE BOOK
38
FIGURE 3–18
The electret capsule:
electret backplate (A);
electret coated
diaphragm (B).
Earg_03.qxd 14/9/04 2:37 PM Page 38
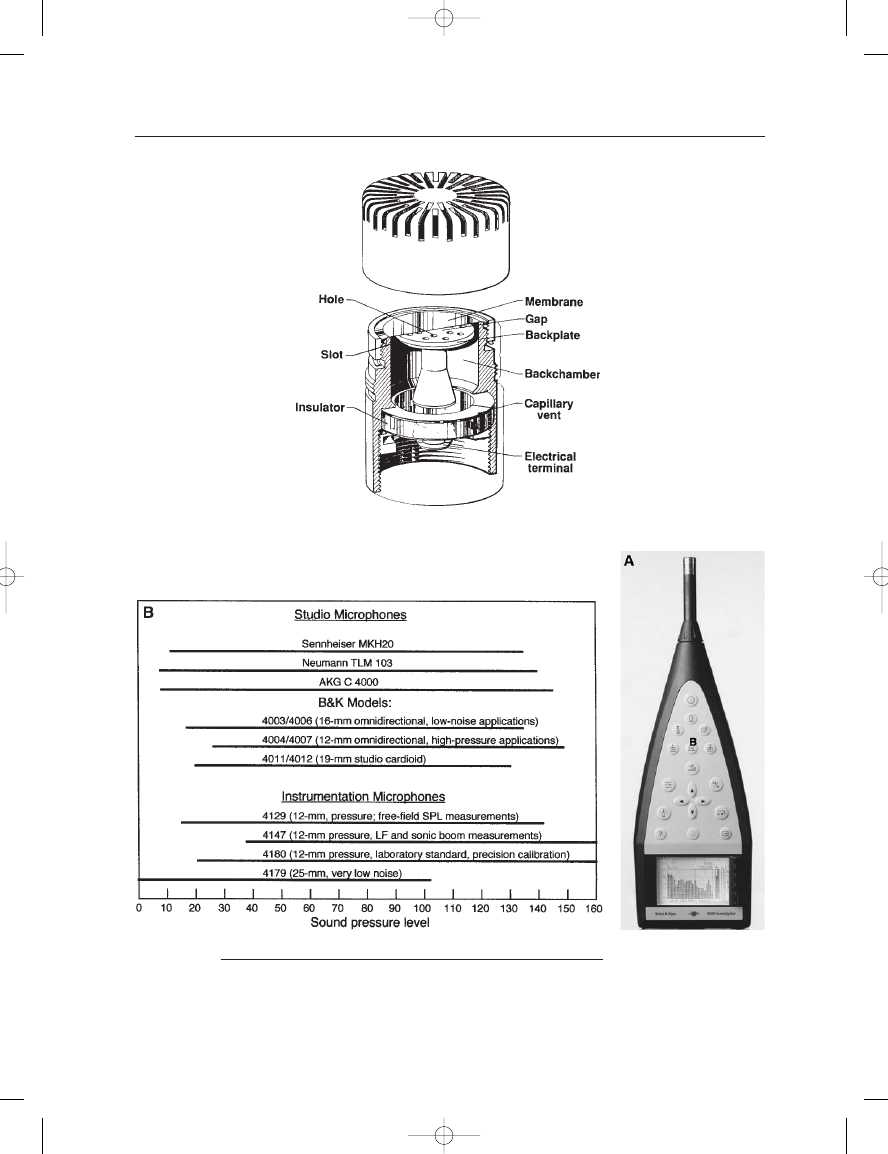
INSTRUMENTATION MICROPHONES
Pressure capacitor microphones are generally used for all instrumenta-
tion and measurement purposes, and as such they differ slightly in design
from those microphones intended for recording and broadcast use.
Figure 3–20 presents a cutaway view of a Brüel & Kjaer instrumentation
capsule showing a perforated backplate somewhat smaller in diameter
than the diaphragm, exposing a back air cavity normally not present in
microphones designed for the studio.
Instrumentation microphones are used in the loudspeaker industry,
architectural acoustics, and as a primary tools for acoustical response
and noise measurements in industrial workplaces.
The most ubiquitous use of these microphones is in the sound level
meter (SLM), shown in Figure 3–21A. The SLM is the primary instru-
ment for sound survey and noise measurement in our everyday environ-
ment. (For routine home sound system setup and level checking, there
are a number of low cost sound survey meters, most of them in the $40
range and available from electronics stores.)
The instrumentation microphone is designed for very uniform
response, unit to unit, and is provided with accessories to facilitate cali-
bration in the field for variations in temperature and barometric pres-
sure. Polarizing voltages are normally in the 200 V range, which allows
somewhat greater separation between diaphragm and backplate, ensur-
ing lower distortion at higher operating levels.
Instrumentation microphones are available in many sizes to cover
the frequency range from well below 1 Hz to 200 kHz and beyond,
depending on the application. There are models that respond to seismic
air movements and have a self-noise floor of
2 dB(A); other models are
designed to work at sound pressure levels in the range of 180 dB L
P
and
above. Figure 3–21B shows the sound pressure level operating ranges of
several studio and instrumentation microphones.
3: The Pressure Microphone
39
FIGURE 3–19
Complete electrical circuit
for an electret microphone
(A); photo of a small
electret capsule (B). (Photo
courtesy of AKG
Acoustics.)
Earg_03.qxd 14/9/04 2:37 PM Page 39
THE MICROPHONE BOOK
40
FIGURE 3–21
A modern digital sound level meter (A); operating ranges of selected studio and
instrumentation microphones (B). (Photo courtesy of Brüel and Kjaer, 1977.)
FIGURE 3–20
Cutaway view of an
instrumentation
microphone. (Figure
courtesy of Brüel and
Kjaer, 1977.)
Earg_03.qxd 14/9/04 2:37 PM Page 40
SENSITIVITY BANDWIDTH, AND DIAPHRAGM
DISPLACEMENT OF CAPACITOR MICROPHONES
Kinsler et al. (1982) present the following simplified equation for the
base sensitivity of a capacitor capsule:
(3.7)
where
E
0
polarizing voltage (V)
h
nominal distance from diaphragm to backplate (m)
a
radius of diaphragm (m)
T
0
effective diaphragm tension (N/m)
Using the following constants for a 25 mm (1 in) diameter instru-
mentation microphone:
a
8.9 10
–3
m
T
0
2000 N/m
E
0
200 volts
h
25 10
6
m
m
(surface mass density of diaphragm)
0.0445 kg/m
2
we can calculate approximate values of microphone sensitivity and
upper frequency limit:
Using a more accurate equation, Zukerwar (1994) arrived at a closer
value of 0.03 V/Pa. The simplified equation gives us only a reasonable
approximation.
Moving on to an equation for the upper frequency limit (f
H
) of the
microphone, we have (Wong and Embleton, 1994):
(3.8)
Above f
H
, the response of the microphone is governed by the degree of
damping at the resonance frequency and diffraction effects. The response
on axis can extend fairly smoothly up to about 20 kHz.
f
H
2.4
6.28(8.9
10
3
)
2000
0.0445
9150
Hz
f
H
2.4
2
a
T
0
m
M
(200)(8.9)
2
(10
6
)
25(10
6
)8(2000)
0.04
V/Pa
M
E
0
a
2
h8T
0
volt
per pascal
3: The Pressure Microphone
41
Earg_03.qxd 14/9/04 2:37 PM Page 41
The LF bandwidth extends to very low frequencies, limited only by
the RC (resistance-capacitance) time constant established by the low
capacitance of the pressure element and the high value of the series resist-
ance. For the 25 mm diameter microphone discussed here, these values
are C
15 10
12
farads and R
10
9
. Calculating the rolloff
frequency, f
L
:
DIAPHRAGM DISPLACEMENT
The diaphragm rms displacement in meters is given by:
(3.9)
For the 25 mm diameter diaphragm under discussion here, the rms dis-
placement is:
It is evident that the diaphragm displacement in the instrumentation
microphone discussed here is considerably less than in the studio micro-
phone discussed above.
THE DYNAMIC PRESSURE MICROPHONE
The dynamic microphone is based on principles of electricity and magnetics
dating from the 19th century. Because of their relatively low output, it was
not until the coming of electrical amplification that these microphones
found their place in commerce and early radio broadcasting. Today, we
find relatively few dynamic pressure microphones in widespread use, their
role having been taken over for the most part by the electret.
The dynamic microphone is also referred to as the electrodynamic,
electromagnetic, or moving coil microphone. It is based on the principle
of magnetic induction in which a conductor, or wire, moving across a
magnetic field has induced along it a voltage proportional to the strength
of the magnetic field, the velocity of the motion, and the length of the
conductor crossing the magnetic field. The governing equation is:
e(t)
Blu(t)
(3.10)
where e(t) is the instantaneous output voltage (V), B is the magnetic flux
density (T), l is the length of the conductor (m), and u(t) is the instanta-
neous velocity of the conductor (m/s). Since B and l are constant, the out-
put voltage is directly proportional to the instantaneous velocity of the
conductor.
The basic principle of magnetic induction is shown in Figure 3–22,
which shows the vector relationship among flux density, conductor
orientation, and conductor velocity. In a microphone, the normal
Displacement
(8.9
10
3
)
2
5
10
11
m
Displacement
pa
2
800T
0
f
L
1/(6.28
15
10
3
)
10.6
Hz
f
L
1/(2
RC)
1/6.28(10
9
15
10
12
)
THE MICROPHONE BOOK
42
Earg_03.qxd 14/9/04 2:37 PM Page 42