ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17253
Скачиваний: 51
●
Magnetostriction. Certain magnetic materials undergo a change in
dimension along one axis under the influence of a magnetic field.
The technique has applications in mechanical position sensing.
●
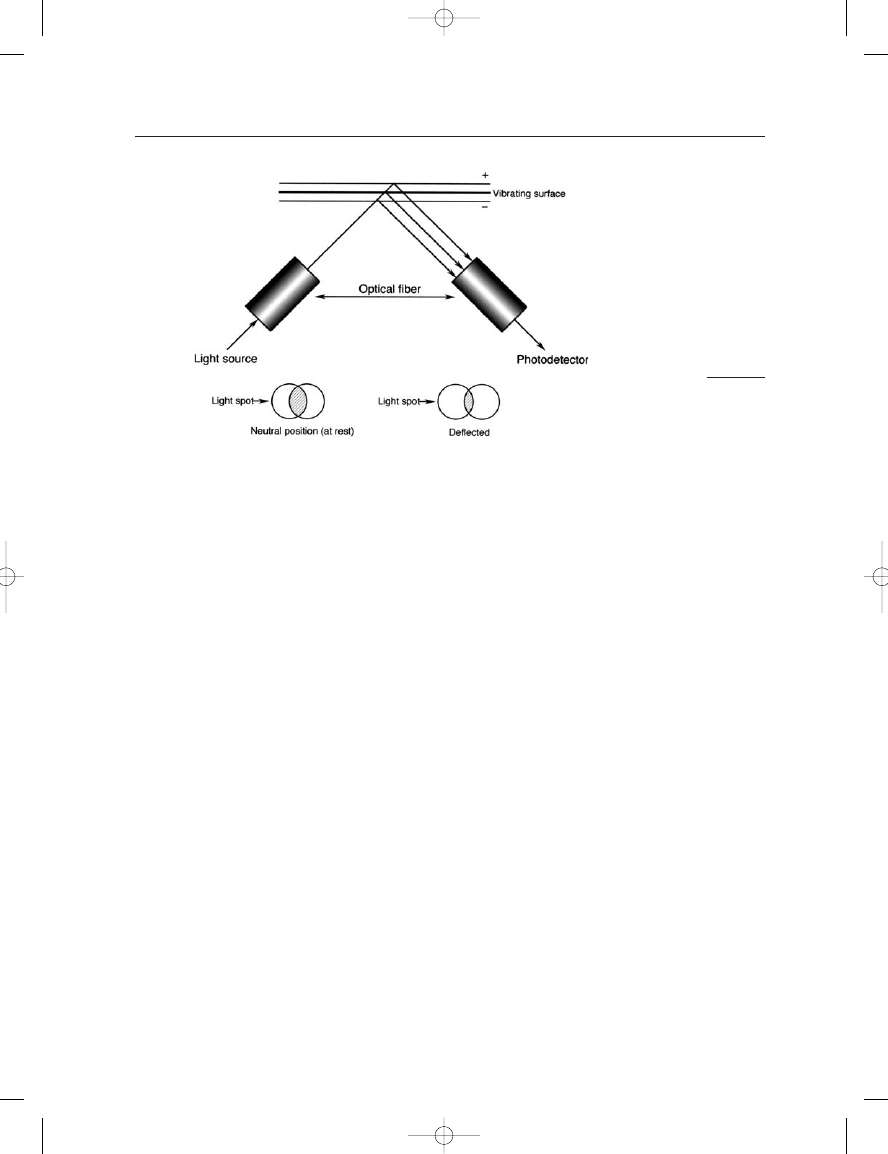
Optical techniques. Sennheiser has demonstrated an optical micro-
phone in which a light beam shines on a diaphragm with a modulated
beam reflecting onto a photodiode. Details are shown in Figure 3–28.
The device can be made quite small and has no electronic components
at the diaphragm (US Patent 5,771,091 dated 1998).
●
Thermal techniques. Olson (1957) describes a microphone consist-
ing of a fine wire heated by direct current. Air currents due to sound
propagation around the wire change its resistance proportionally. If
the wire can be biased by direct current air flow, then minute
changes in wire resistance due to sound pressure in the direction of
the air flow can be detected. The technique is very promising in the
area of acoustical intensity measurement.
PIEZOELECTRIC MICROPHONES
During the 1930s to the 1960s, the piezoelectric, or crystal, microphone
was a significant factor in the market for home recording and small-scale
paging and sound reinforcement activities. Today, low-cost dynamic and
electret microphones have all but displaced the piezoelectric microphone.
(The term piezo comes from the Greek piezen, meaning pressure.)
Certain crystalline materials, such as Rochelle salts (potassium
sodium tartrate), ADP (ammonium dihydrogen phosphate), and lithium
sulfite, exhibit the property of developing a voltage along opposite sides
when they are flexed or otherwise subjected to deformation. The effect is
bilateral, and the elements can also be used as HF loudspeakers.
THE MICROPHONE BOOK
48
FIGURE 3–28
Details of an optical
microphone. (Data after
Sennheiser.)
Earg_03.qxd 14/9/04 2:37 PM Page 48
The crystal structures must be cut and arrayed along the appropri-
ate crystalline axes to produce the desired output voltage. Most piezo-
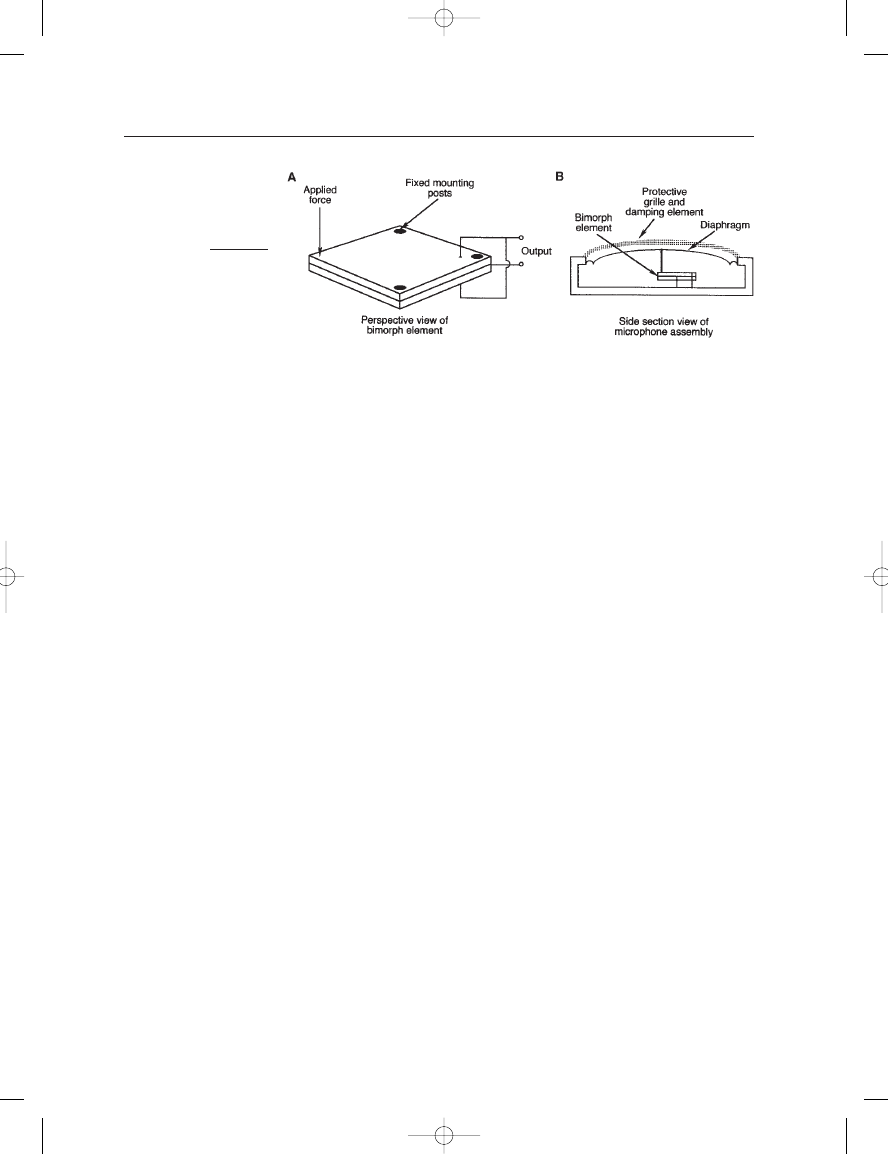
electric microphones are assembled from so-called bimorph piezo
structures in which adjacent crystal elements are cemented to each other
in an opposite sense so that a push-pull output result. Figure 3–29A
shows a typical bimorph structure, consisting of two crystal elements
cemented together with metal foil on each conducting surface. The ele-
ment is secured on three corners, and the free corner is driven by the
diaphragm through a connecting member.
Figure 3–29B shows a section view of a typical crystal microphone.
The diaphragm motion is connected to the free corner of the bimorph,
and the output voltage is fed downstream to a preamplifier. Since the
output voltage from the bimorph is proportional to signal displacement,
the diaphragm is normally tuned to a high frequency, with external
mechanical damping, as shown in the figure.
Typical crystal microphones exhibit output sensitivities in the mid-
band of about 10 mV/Pa and, as such, can be used to drive high-imped-
ance preamplifiers directly. The cable length between microphone and
preamplifier is limited because of shunt capacitance HF losses in the
cable.
In the areas of hydrophones (sensors used for underwater sonar sig-
nal transmission and detection), mechanical positioning, and very high
acoustical level measurements, piezo electric elements are useful, in that
their mechanical impedance characteristics are better suited for these
applications than for normal audio use.
Those readers wanting more information on piezoelectric micro-
phones are referred to Beranek (1954) and Robertson (1963).
3: The Pressure Microphone
49
FIGURE 3–29
Details of a piezoelectric
bimorph element (A);
section view of a
piezoelectric
microphone (B).
Earg_03.qxd 14/9/04 2:37 PM Page 49
C
H
A
P
T
E
R
4
THE PRESSURE GRADIENT
MICROPHONE
INTRODUCTION
The pressure gradient microphone, also known as the velocity microphone,
senses sound pressure at two very closely spaced points corresponding to
the front and back of the diaphragm. The diaphragm is thus driven by the
difference, or gradient, between the two pressures. Its most common form,
the dynamic ribbon (diaphragm) microphone, was developed to a high
degree of technical and commercial success by Harry Olson of RCA during
the 1930s and 1940s and dominated the fields of broadcasting and record-
ing in the US through the mid-1950s. The BBC Engineering Division in the
United Kingdom was also responsible for significant development of the
ribbon, extending its useful response to 15 kHz at the advent of FM radio
transmission in the mid-1950s.
The use of the term velocity derives from the fact that the pressure
gradient, at least at long wavelengths, is virtually proportional to air par-
ticle velocity in the vicinity of the diaphragm or ribbon. However, the
more common term is pressure gradient, or simply gradient, micro-
phone. The basic pressure gradient microphone has a “figure-8”-shaped
pickup pattern and its pickup pattern is often referred to as bidirectional.
DEFINITION AND DESCRIPTION OF THE
PRESSURE GRADIENT
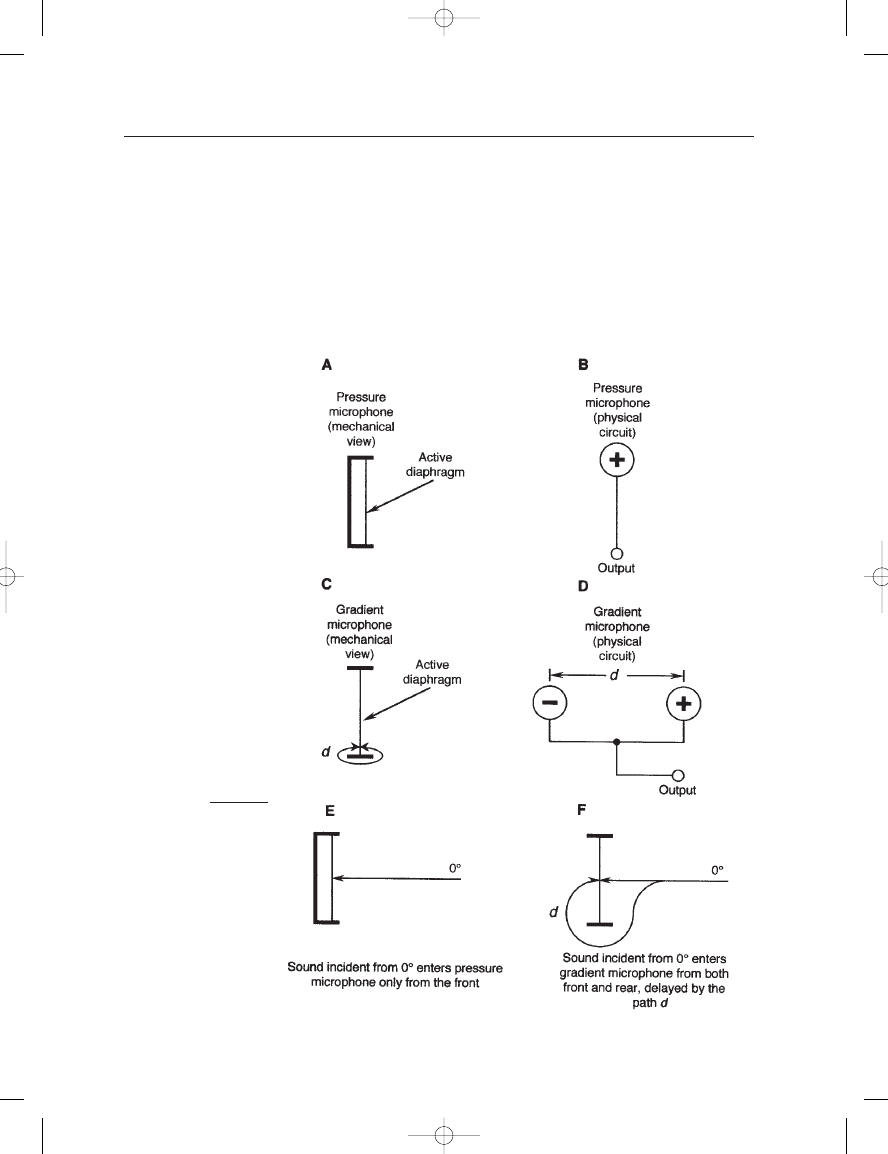
By way of review, the basic action of the pressure microphone is shown
in Figure 4-1A and B. The mechanical view shown at A is equivalent to
the physical circuit shown at B. The significance of the plus sign in the
circle is that a positive pressure at the microphone will produce a posi-
tive voltage at its output. The circle itself indicates that the microphone
is equally sensitive in all directions.
Earg_04.qxd 14/9/04 2:38 PM Page 50
4: The Pressure Gradient Microphone
51
A mechanical view of the gradient microphone is shown at C. It is
open on both sides of the diaphragm and is symmetrical in form. The
equivalent physical circuit is shown at D. Here, there are two circles, one
positive and the other negative, which are separated by the distance d.
The significance of the negative sign is that sound pressure entering the
back side of the microphone will be in polarity opposition to that enter-
ing from the front. The distance d represents the equivalent spacing
around the microphone from front to back access to the diaphragm.
FIGURE 4–1
Definition of the pressure
gradient. Mechanical view
of pressure microphone (A);
physical circuit of pressure
microphone (B); mechanical
view of pressure gradient
microphone (C); physical
circuit of pressure gradient
microphone (D); 0
sound
incidence on pressure
microphone (E); sound
incidence on pressure
gradient microphone (F).
Earg_04.qxd 14/9/04 2:38 PM Page 51
THE MICROPHONE BOOK
52
Sound incident on the pressure microphone along the 0
axis will
enter only from the front, as shown at E, while sound incident on the gra-
dient microphone along the 0
axis will enter by the front opening as well
as through the back opening delayed by the path d. This is shown at F.
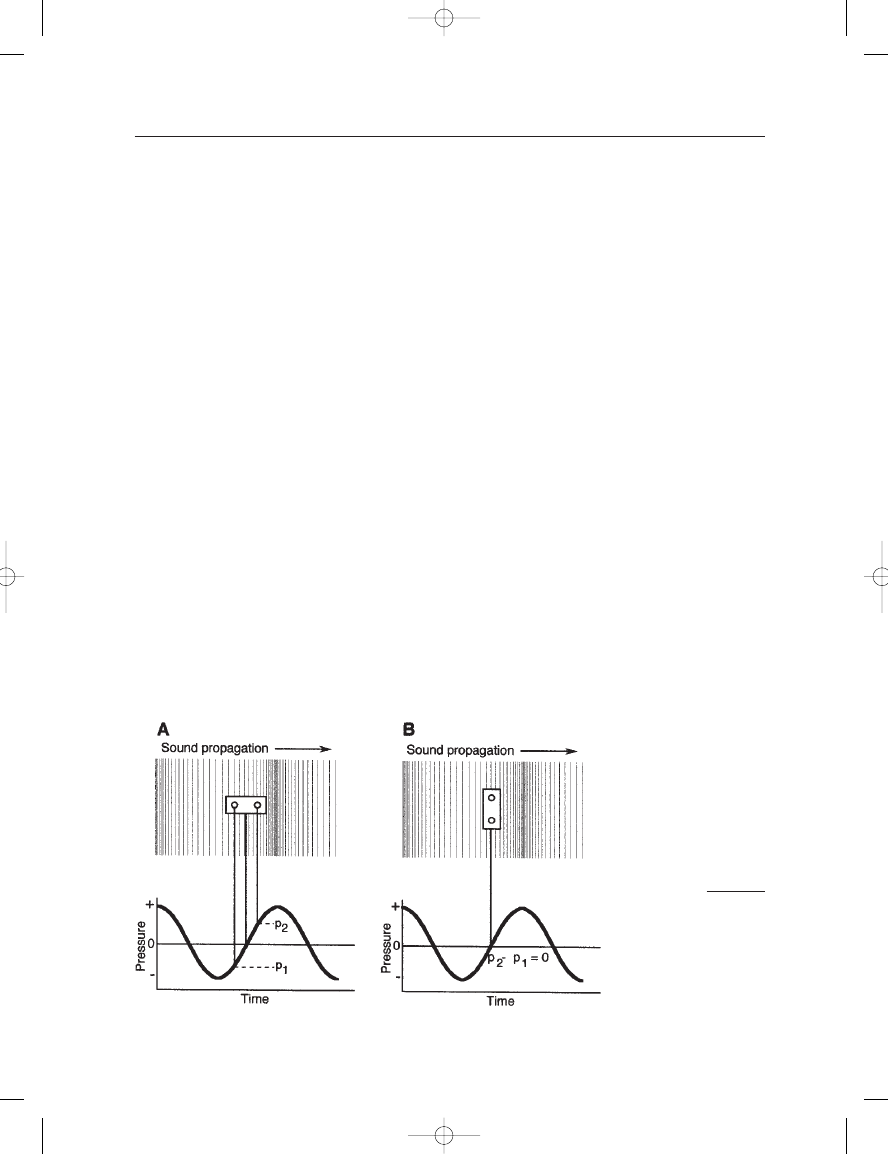
The gradient microphone has the capability of determining the propa-
gation angle of a wave. This can be seen in the upper part of Figure 4–2A.
A portion of a plane wave is shown along with locations of the two micro-
phone openings placed in line with the wave propagation. These two points
relate directly to the points indicated on the sine wave shown below and
represent the two openings of the gradient microphone. Now, if the two
openings are positioned as shown in Figure 4–2B, there will be no pressure
gradient between them and thus no signal at the microphone’s output.
The pressure gradient increases with frequency, as shown in
Figure 4–3. Here, we show the gradients that exist at LF, MF, and HF
when the pressure sensing points are in line with wave propagation. For
long wavelengths, the gradient is directly proportional to frequency and
is of the form:
(4.1)
where ge
j
t
represents the instantaneous value of the gradient, K
1
is an
arbitrary constant, and pe
j
t
is the instantaneous value of pressure. If the
air particle velocity is uniform with respect to frequency, the K
1
j
multi-
plier in the right side of equation (4.1) indicates that the value of the
pressure gradient will be proportional to frequency, rising at a rate of
6 dB/octave, and that the phase of the pressure gradient will be advanced
90
with respect to pressure. This can in fact be seen through a study of
the graphical data shown in Figure 4–3.
For a pressure gradient microphone to exhibit flat response in a uni-
form pressure field, there must be some form of equalization present that
ge
j
t
K
1
j
pe
j
t
FIGURE 4–2
Pressure gradient measured
longitudinally in a
progressive plane wave is
equal to p
2
–p
1
(A); when
placed transversely in the
progressive plane wave the
gradient is zero (B).
Earg_04.qxd 14/9/04 2:38 PM Page 52