ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17250
Скачиваний: 51
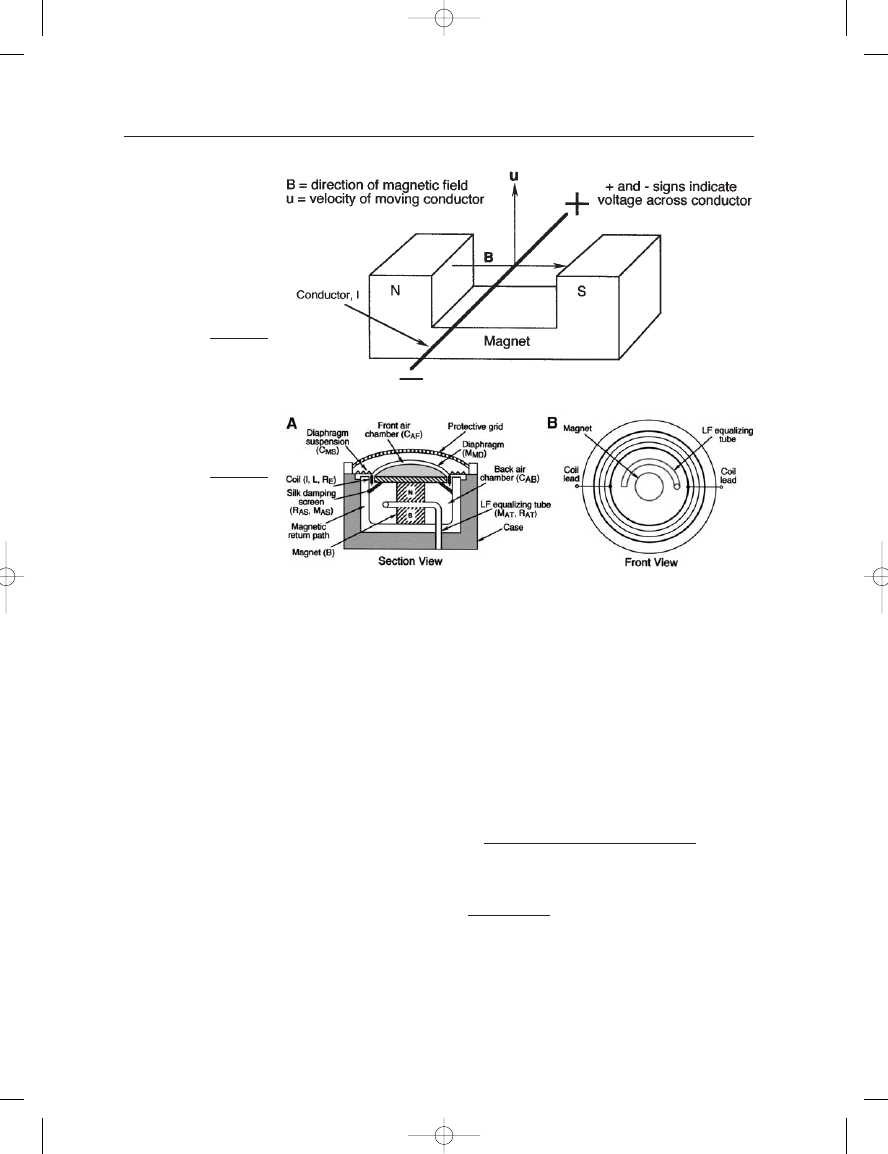
realization is in the form of a multi-turn coil of wire placed in a radial
magnetic field. Section and front views of a typical dynamic pressure
microphone are shown in Figure 3–23. In this form, the action is the
reciprocal of the modern dynamic loudspeaker.
In a plane progressive sound field, air particle velocity and pressure are
in phase. Therefore, for flat electrical output across the conductor, the con-
ductor must execute constant velocity across the entire frequency band in
a constant pressure sound field. Since the coil/diaphragm assembly consists
of mechanical mass and compliance, it will exhibit mechanical resonance;
and this is normally designed to be near the geometric mean of the
intended frequency response of the microphone. The geometric mean
between two quantities along the same numerical scale is defined as:
(3.11)
For a typical response extending from 40 Hz to about 16 kHz, the design
resonance is:
The microphone is thus designed to be resistance controlled over its use-
ful frequency range through the application of external damping of the
diaphragm’s motion.
Figure 3–24 shows the response of an undamped diaphragm (curve 1),
along with the effects of increased damping (curves 2 through 5). Note
f
0
40
16,000
800
Hz
Geometric
mean
lower
quantity
higher
quantity
3: The Pressure Microphone
43
FIGURE 3–22
Basic principle of magnetic
induction.
FIGURE 3–23
Section view (A) and front
view (B) of a moving coil
microphone assembly
(protection grid removed
in front view).
Earg_03.qxd 14/9/04 2:37 PM Page 43
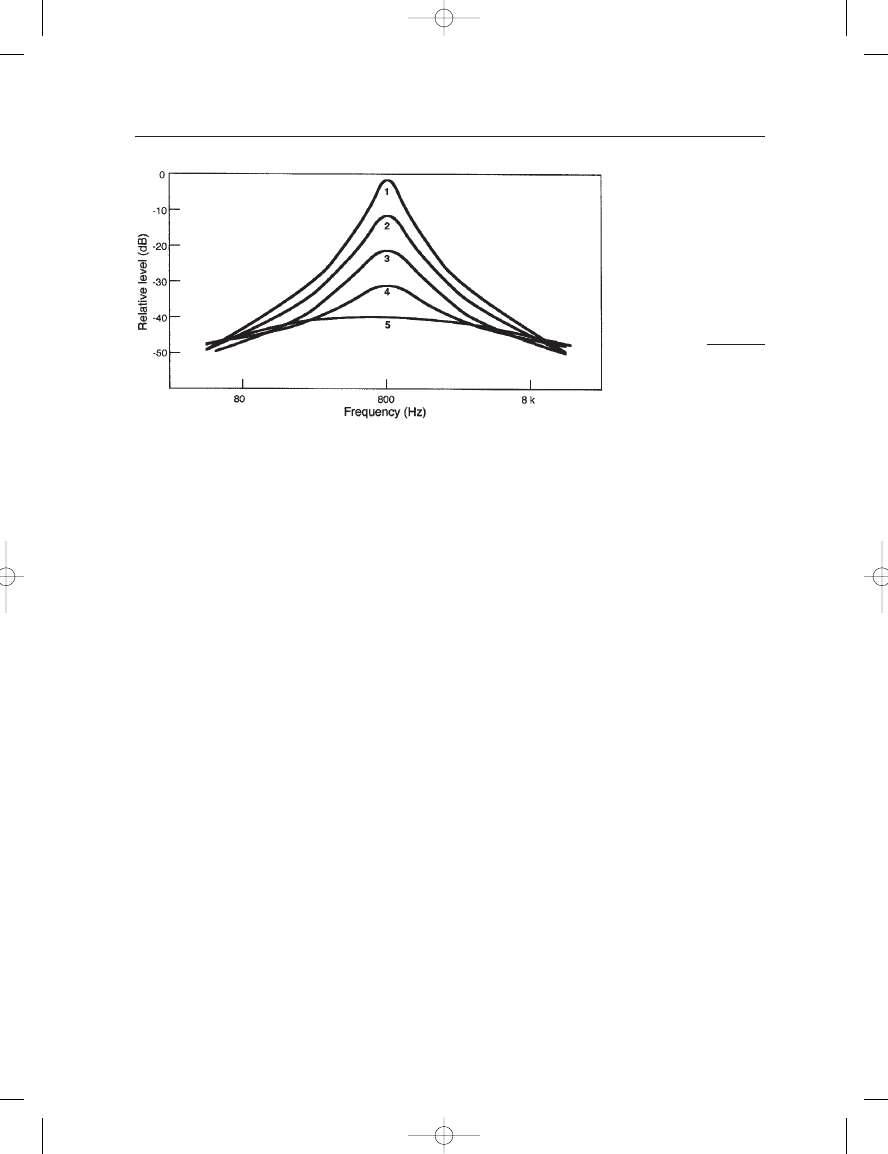
that, as the damping increases, the midband output becomes flatter, but at
the expense of midband sensitivity. To achieve satisfactory frequency
response while maintaining a useful overall sensitivity, several design tech-
niques are employed. The diaphragm is damped by placing layers of silk
or thin felt in the region of the gap that separates the coil from the back of
the air chamber. In general, the MF resonance peak is reduced by about
25–35 dB, producing the response shown in curve 5. To add more
midrange damping in this manner would result in unsatisfactory output
sensitivity.
The next step is to address the LF response falloff, and this is accom-
plished by inserting a long, narrow tube into the back air chamber exiting
to the outside air. The tube dimensions are chosen so that the air mass in
the tube will resonate with the compliance provided by the internal air
chamber itself. This Helmholz resonance is chosen to be at some frequency
in the 40–100 Hz range. A final step is to compensate for the HF falloff,
and this is done by creating a small resonant chamber just inside the
diaphragm, tuned in the range 8–12 kHz. These added LF and HF reso-
nances boost the microphone’s output in their respective frequency
regions.
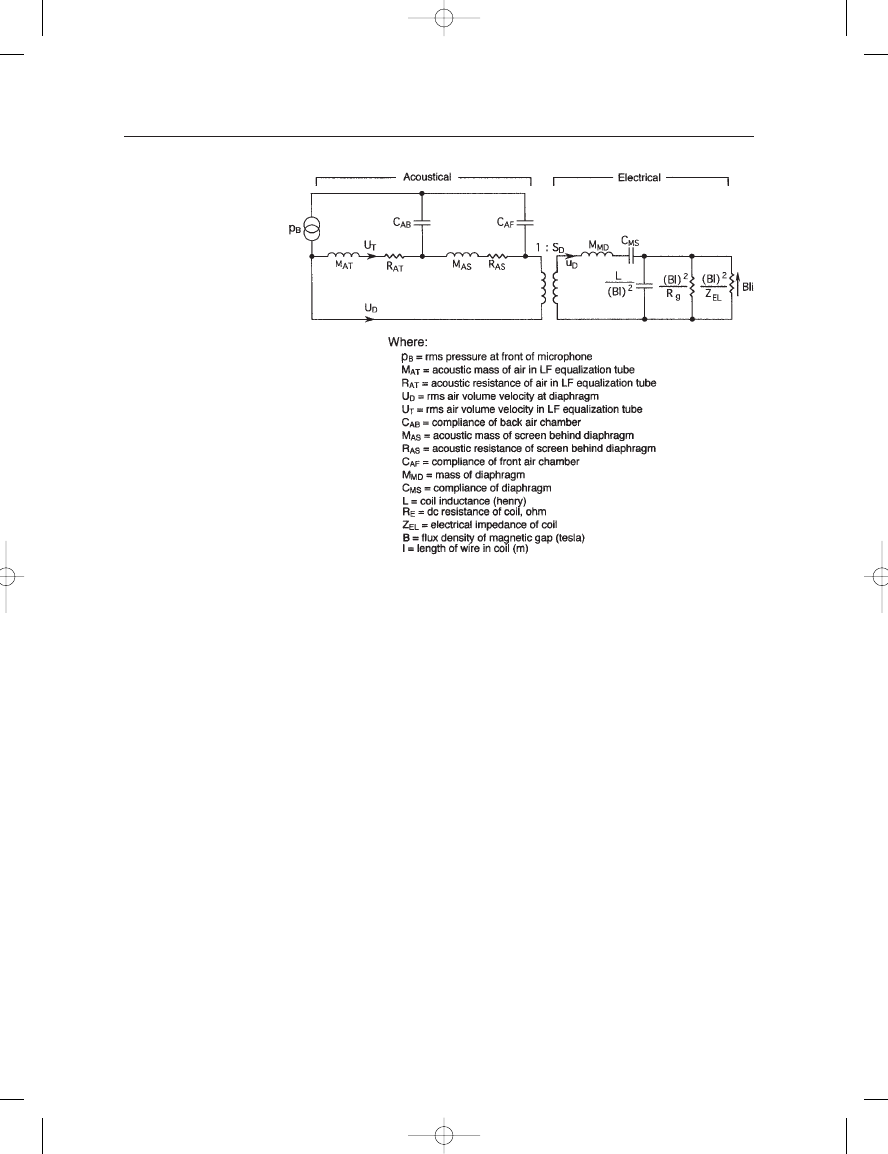
The design process of damping the primary diaphragm resonance,
while adding both LF and HF peaks in the response can best be seen
through analysis of the equivalent circuit (after Beranek, 1954), as
shown in Figure 3–25.
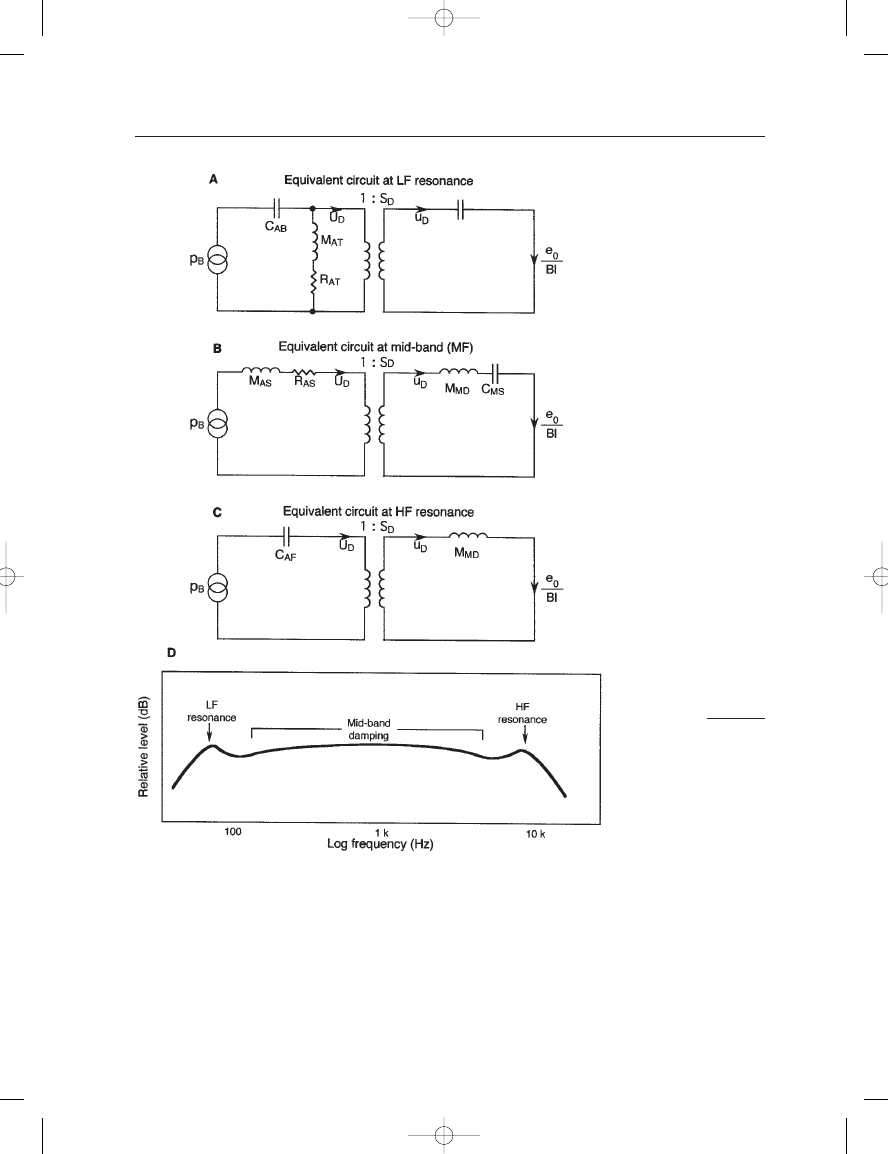
At LF the response is largely determined by the resonance set up by
the bass equalization tube and the back air chamber, and the equivalent
circuit in this frequency range is shown in Figure 3–26A.
At MF the response is governed by the damping provided by the silk
layers just below the coil, and the equivalent circuit in this frequency
range is shown in Figure 3–26B.
At HF the response is determined largely by the resonance set up by
the mass of the diaphragm and the compliance of the front air chamber
THE MICROPHONE BOOK
44
FIGURE 3–24
Basic diaphragm
response control, the effect
of externally damping the
diaphragm.
Earg_03.qxd 14/9/04 2:37 PM Page 44
directly below it. The equivalent circuit in the frequency range is shown
in Figure 3–26C, and the net overall response is shown in Figure 3–26D.
We can see that there is much design leeway here, and some pressure
dynamic microphones have been designed with more resonant chambers
than we have shown here. With care in manufacturing, response toler-
ances for dynamic pressure microphones can be maintained within a
range of
2.5 dB from 50 Hz to about 15 kHz, as measured on axis.
We can appreciate that the design of a good dynamic pressure micro-
phone results from a combination of physics, ingenuity, and years of
design practice. Such questions as where to place damping materials and
where to assign the LF and HF resonances require experience, and the
many variables provide for tailored response for a given microphone
application. See Souther (1953) for a practical approach to the design of
a dynamic pressure microphone for general application. See also Beranek
(1954) and Kinsler et al. (1982).
TYPICAL DIMENSIONS AND PHYSICAL QUANTITIES
The microphone diaphragm may be made of duralumin, a stiff, light-
weight alloy of aluminum, or one of many stable plastic materials that
can be molded to tight tolerances in thin cross-section. The dome nor-
mally moves as a unit, with mechanical compliance provided by reticu-
lated treatment in the outer detail of the dome. Small neodymium
magnets are very common in modern designs. Typical physical values for
3: The Pressure Microphone
45
FIGURE 3–25
Simplified equivalent
circuit of the dynamic
pressure microphone.
(Data after Beranek, 1954.)
Earg_03.qxd 14/9/04 2:37 PM Page 45
a dynamic pressure microphone are:
B
1.5 T (tesla)
l (length of wire in gap)
10 m
Diaphragm/coil radius
9 mm
Diaphragm displacement for 94 dB L
P
at 1 kHz
2 10
2
m rms
THE MICROPHONE BOOK
46
FIGURE 3–26
Designing for low,
medium, and high
frequency regimes: LF
resonance (A); MF
damping (B); HF resonance
(C); net response (D). (Data
at A, B, and C after
Beranek, 1954.)
Earg_03.qxd 14/9/04 2:37 PM Page 46
Mass of moving system
0.6 grams
Electrical impedance
150–125
Sensitivity range
1.5–2.5 mV/Pa
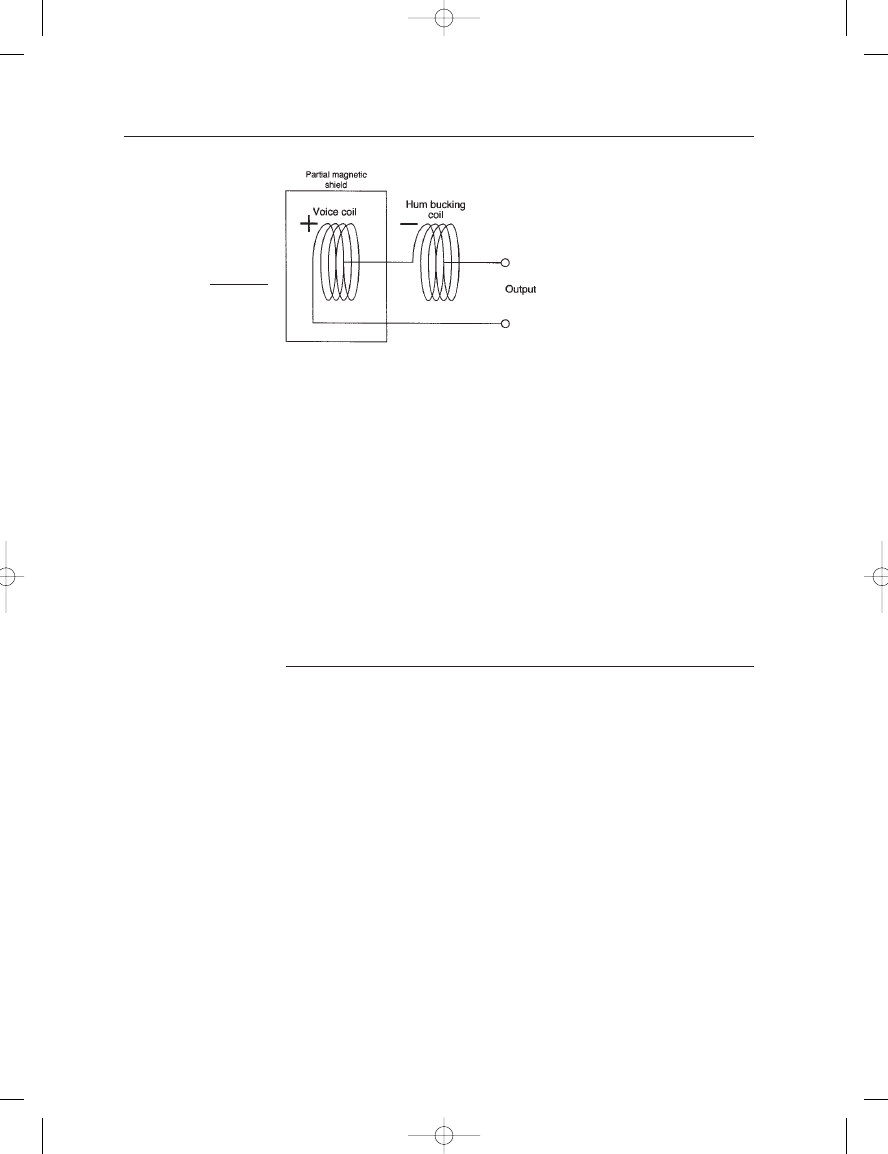
Many dynamic microphones, both omnidirectional and directional,
incorporate a “hum-bucking” coil to cancel the effect of stray power line
induction at 50/60 Hz. This is a low-resistance coil in series with the
voice coil and located externally to the magnet structure of the micro-
phone. It is wound reversely and located along the same axis as the voice
coil. It is designed to produce the same induced signal that the voice coil
would pick up in the stray alternating magnetic field; thus the two
induced signals will cancel. The hum-bucking coil is shown in the
schematic of Figure 3–27.
OTHER PRESSURE MICROPHONE TRANSDUCERS
Numerous other transducing principles have been used in the design of
pressure microphones, including the following:
●
Loose contact principle. These methods were discussed in Chapter 1
since they were key items in the early history of microphone technol-
ogy. Only the loose carbon particle microphone has remained a viable
design in telephony over the years, and those readers interested in its
ongoing development are referred to the Bell Telephone Laboratories
(1975) book, History of Engineering and Science in the Bell System.
●
Magnetic armature techniques. This technology was described in
Chapter 1 as an essential part of Bell’s original telephone patent, but
the microphone application is not current today. Olson (1957) dis-
cusses it in detail. The system is bilateral and can be employed as
either a microphone or a loudspeaker.
●
Electronic techniques. Olson (1957) describes a microphone in
which an electrode in a vacuum tube is mechanically actuated by an
external diaphragm, thus varying the gain of the vacuum tube. The
technique is entirely experimental and has not been commercialized.
3: The Pressure Microphone
47
FIGURE 3–27
Electrical circuit showing
hum-bucking coil in a
dynamic microphone.
Earg_03.qxd 14/9/04 2:37 PM Page 47