ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17254
Скачиваний: 51
4: The Pressure Gradient Microphone
53
exactly counteracts the HF rise of the pressure gradient. In the case of the
dynamic gradient microphone the electrical output is:
(4.2)
where E is the rms output voltage of the microphone, B is the flux den-
sity in the magnetic gap (tesla), l is the length of the moving conductor in
the magnetic field (m), and U is the rms velocity of the conductor (m/s).
This output voltage would tend to rise 6 dB/octave at HF if the
microphone were placed in a sound field that exhibited rising HF air par-
ticle velocity. The required equalization can be done electrically, but is
accomplished very simply by using a mass-controlled ribbon or diaphragm
of the form K
2
/j
. The combination of the pressure gradient and the
mechanical HF rolloff is then:
(4.3)
which is now proportional to the rms pressure and is flat over the
frequency band.
With the capacitor form of the gradient microphone, flat electrical out-
put in a flat sound pressure field depends on constant displacement of the
diaphragm over the entire frequency range. Since the driving pressure gra-
dient rises 6 dB/octave at HF, it will produce a constant particle displace-
ment with frequency at the capacitor diaphragm. Therefore, if the capacitor
diaphragm’s mechanical damping is large compared to its compliance and
mass reactance, then the required equalization will be attained.
DIRECTIONAL AND FREQUENCY RESPONSE OF
GRADIENT MICROPHONES
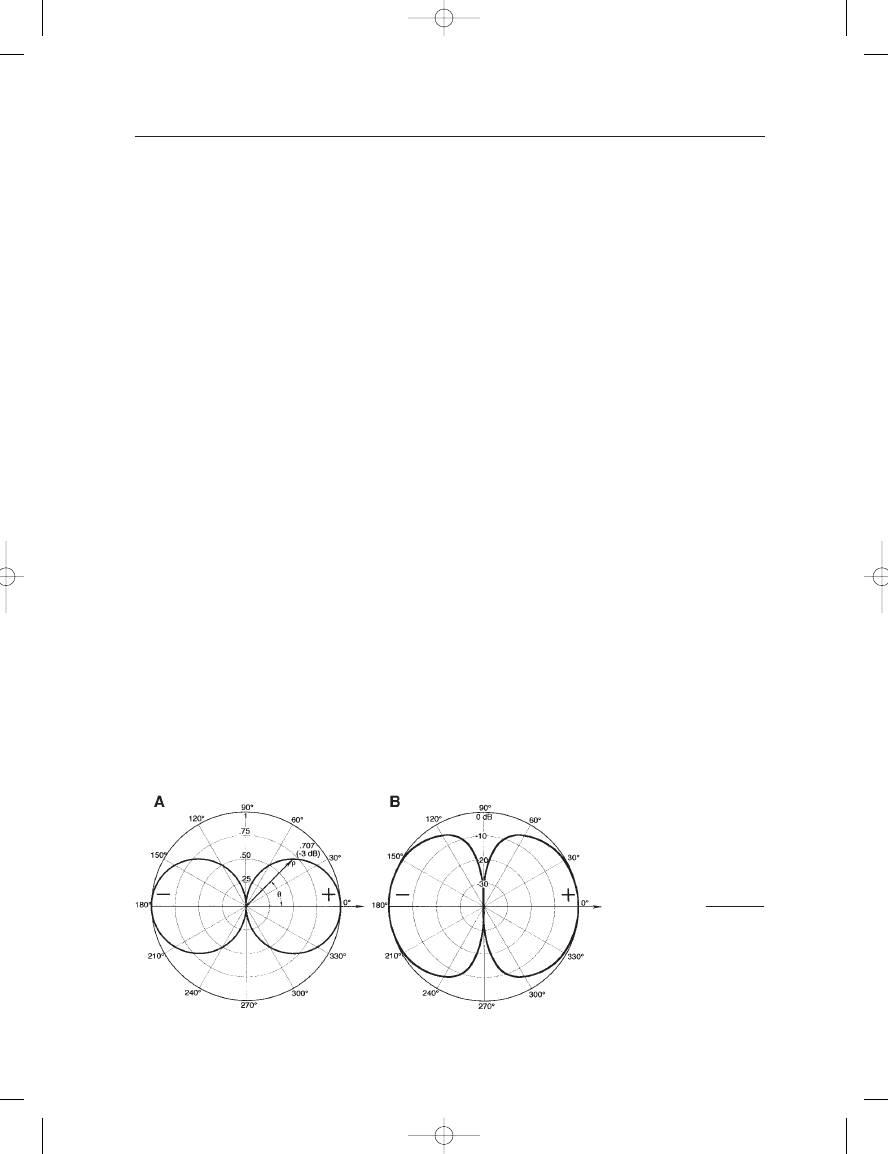
Figure 4–4A shows the basic “figure-8” response of the gradient
microphone. It is important to note that the response is maximum at
Net
response
(K
1
pj
e
j
t
)/(K
2
/j
)(K
1
/K
2
)pe
j
t
E
e
j
t
B1Ue
j
t
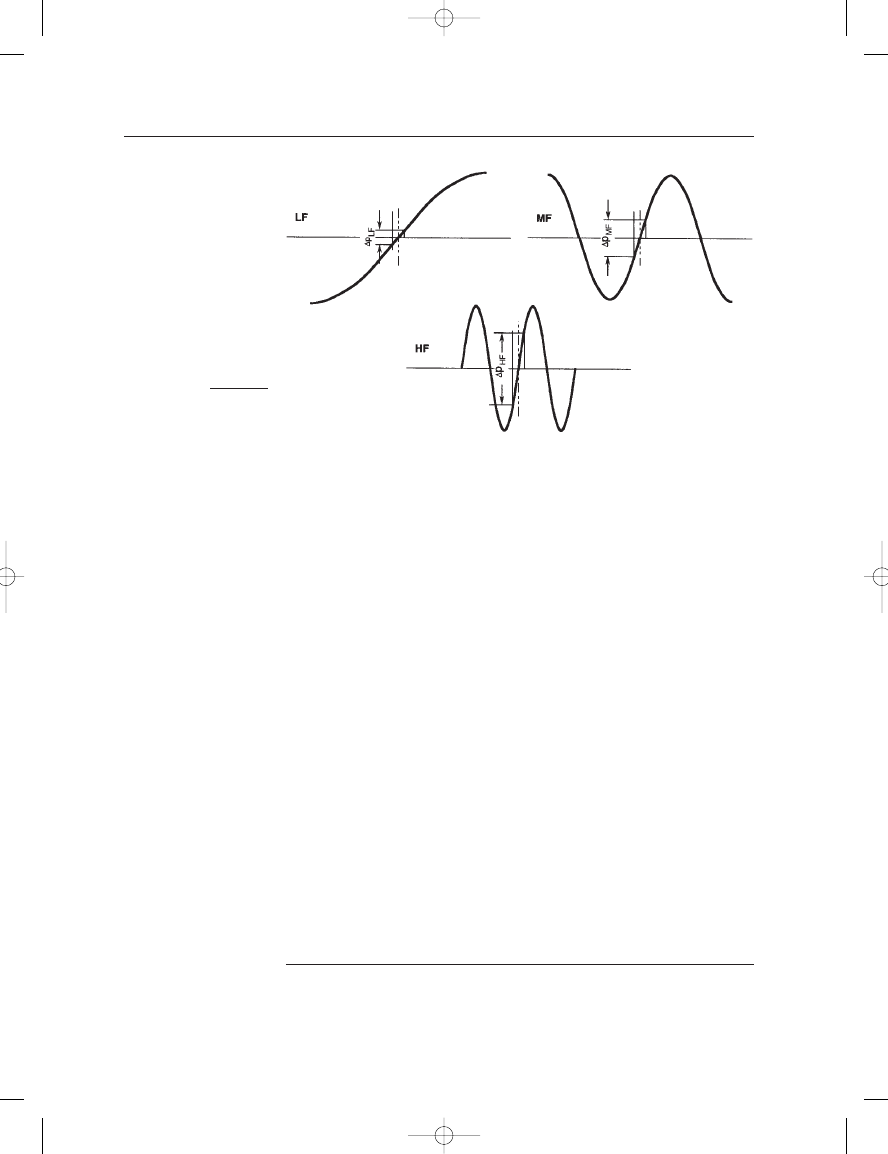
FIGURE 4-3
Pressure gradient at LF,
MF, and HF.
Earg_04.qxd 14/9/04 2:38 PM Page 53
THE MICROPHONE BOOK
54
0
and 180, but that the polarity of the signal is negative (reversed) in
the back hemisphere relative to the front hemisphere. Response at
45 is 0.707, which is equivalent to 3 dB. Response at 90 is
effectively zero. The directional response equation in polar coordi-
nates is:
cosine
(4.4)
where
represents the magnitude of the response and represents the
polar angle. Figure 4–4B shows the response plotted in decibels.
The frequency range over which the desired polar response is main-
tained depends on the size of the microphone and the effective distance
between the two sensing points, or distance from the front of the
diaphragm around the assembly to the back of the diaphragm. The first
null in response takes place when the received frequency has a wave-
length that is equal to the distance, d, between the two openings of the
microphone.
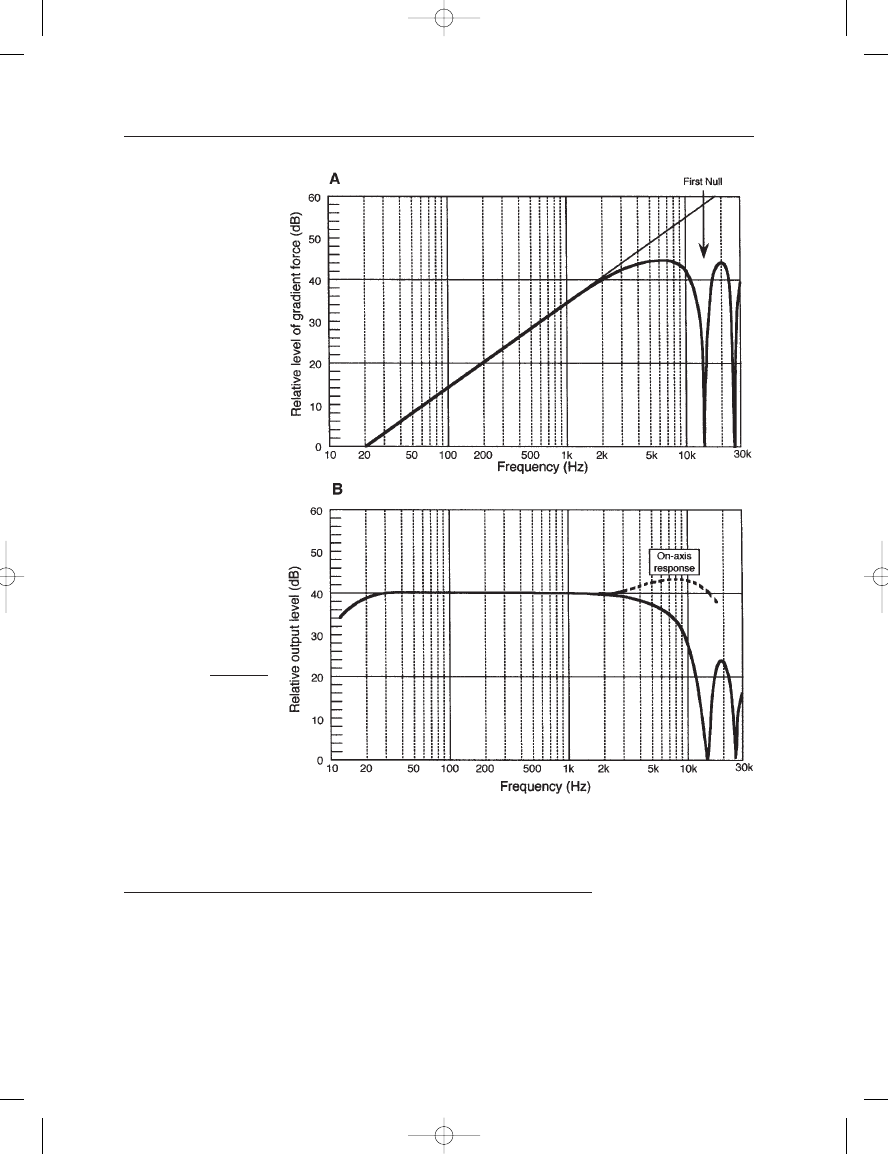
The pressure gradient, as a function of frequency, is shown in
Figure 4–5A. The response rises 6 dB per octave, falling to a null in
response at the frequency whose wavelength is equal to d, the path
around the microphone. The theoretical equalized microphone output is
shown at B. However, due to diffraction effects, the actual response at
HF may resemble that shown by the dashed line in the figure.
For extended frequency response, we would like d to be as small as
possible. If d/
1/4, the drop in response will only be 1 dB (Robertson,
1963). Solving this equation for a frequency of 10 kHz gives a value of
d
8.5 mm (0.33 in). However advantageous this might be in terms of
frequency response, the very short path length would produce a rela-
tively small pressure gradient, and the resultant output sensitivity of the
microphone would be low. Fortunately, diffraction effects work to our
advantage, maintaining excellent on-axis frequency response even when
a substantially longer front-to-back path is used. This will be discussed
in the following section.
FIGURE 4–4
Directional response in
polar coordinates of the
gradient microphone;
sound pressure gradient
response (A); response level
in decibels (B).
Earg_04.qxd 14/9/04 2:38 PM Page 54
4: The Pressure Gradient Microphone
55
MECHANICAL DETAILS OF THE DYNAMIC PRESSURE
GRADIENT MICROPHONE
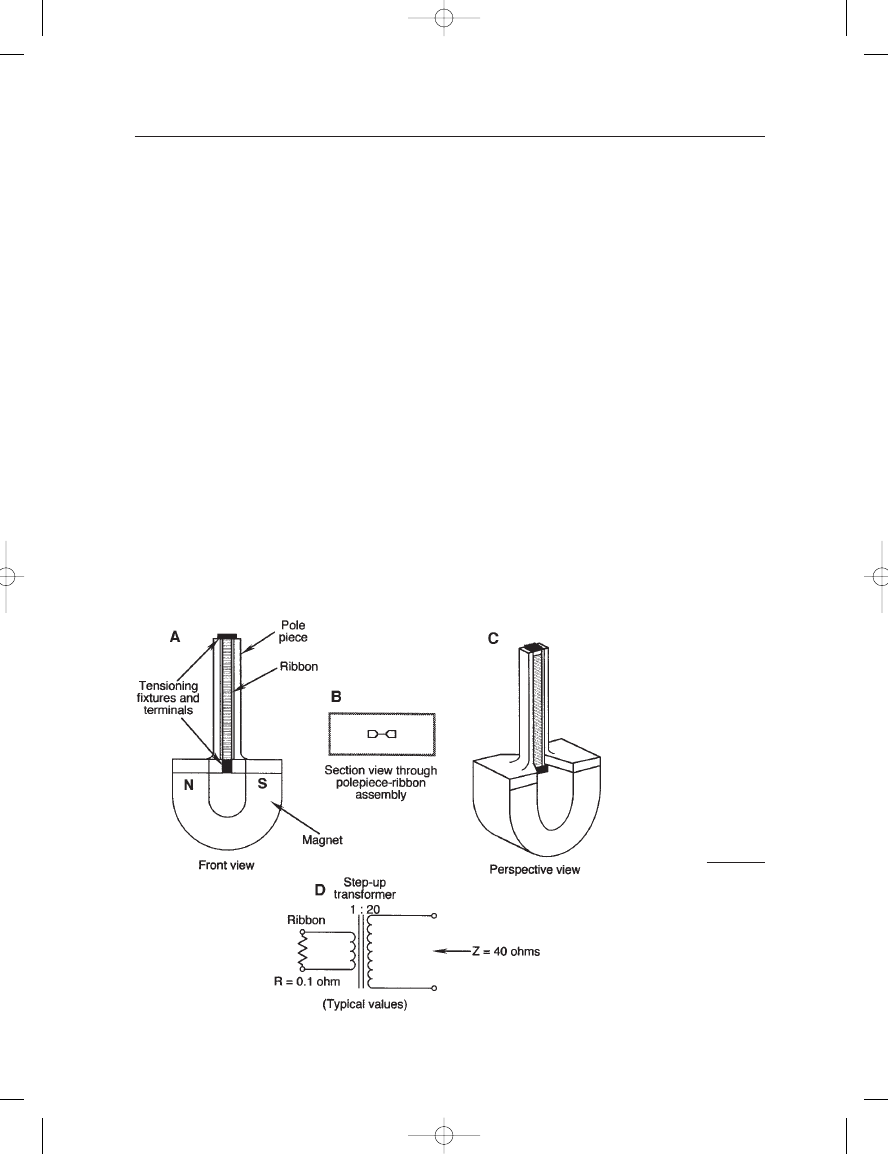
Mechanical and electrical views of a ribbon gradient microphone are
shown in Figure 4–6. The ribbon itself is normally made of corrugated
aluminum foil and is about 64 mm (2.5 in) in length and 6.4 mm (0.25 in)
in width. It is suspended in the magnetic gap with provisions for adjust-
ing its tension. In newer designs the thickness of the ribbon is often in
the range of 0.6 microns (2.5
10
5
in), and the length in the range of
FIGURE 4–5
Pressure gradient force
versus frequency,
unequalized (A) and
equalized (B), for a typical
ribbon microphone (typical
on-axis HF response shown
by dashed curve).
Earg_04.qxd 14/9/04 2:38 PM Page 55
THE MICROPHONE BOOK
56
25 mm (1 in). The mass of the ribbon, including its associated air load, is
about 0.001 to 0.002 grams, and the subsonic resonance frequency of
the ribbon is in the range of 10 to 25 Hz. Because of the small gap
between the ribbon and polepieces, there may be considerable viscous
damping on the ribbon in the region of resonance. Flux density in the
gap is normally in the range of 0.5 to 1 T (tesla).
Early ribbon microphones were quite large, with heavy, relatively
inefficient magnets. The fragility of the ribbon microphone was well
known to all who used them; some ribbons tended to sag slightly over
time, and a good puff of wind could actually deform them. Because of
their flexibility, ribbons may, like a string, vibrate at harmonic multiples
of their fundamental frequency (Robertson, 1963). This is not often
encountered in well-damped designs, however.
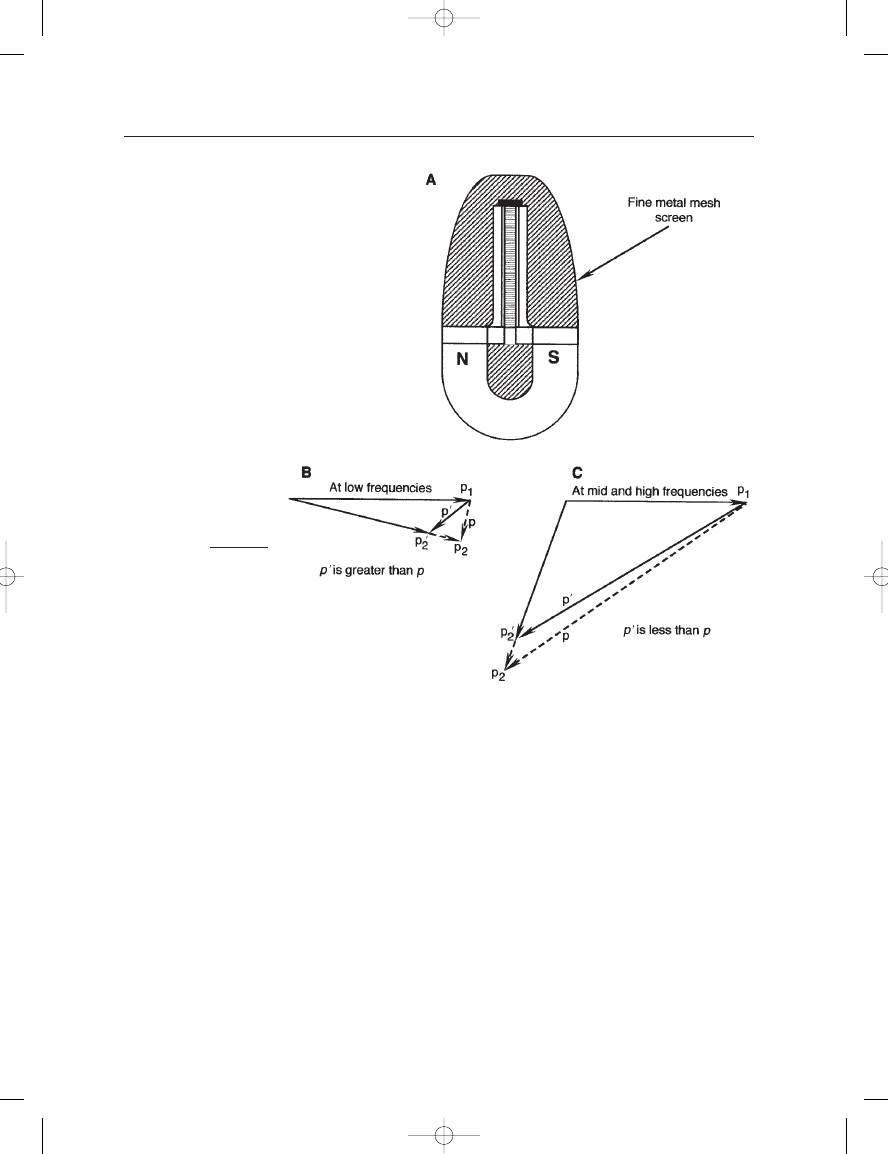
A closer look at the workings of a ribbon microphone will often reveal
a careful use of precisely designed and shaped screens, made of fine metal
mesh or of silk, whose purposes are to make fine adjustments in frequency
response. As shown in Figure 4–7A, a metal mesh screen has been mounted
around the polepiece assembly in order to compensate for LF losses due to
the high damping on the ribbon in the region of resonance.
The fine mesh of the structure has been chosen to provide a fairly
uniform acoustical impedance over the operating frequency range of the
microphone. The vector diagram at B shows its effect at LF. The loss
introduced by the screen over the path d results in a lower value of
pressure (p
2
) at the rear of the ribbon. This actually produces a larger
FIGURE 4–6
A ribbon gradient
microphone; front view (A);
top section view (B);
perspective view (C);
electrical circuit (typical)
associated with the ribbon
microphone (D). (Data at
B and C after Beranek,
1954.)
Earg_04.qxd 14/9/04 2:38 PM Page 56
4: The Pressure Gradient Microphone
57
gradient (p
) at LF than would exist without the screen (p), and the net
effect is a compensating boost at LF.
At MF and HF, the screen’s action is as shown at C. Here, the effect
of the screen is to cause a slight decrease in the gradient (p
), which may
be a small price to pay for correcting the LF response. This design is used
to good effect in the Coles model 4038 microphone and is described in
detail by Shorter and Harwood (1955).
SENSITIVITY OF THE RIBBON GRADIENT MICROPHONE
There are four main factors affecting the base sensitivity of the ribbon:
magnetic flux density in the gap, length and mass of the ribbon, and
the length of the front-to-back path. Aluminum foil, since it possesses the
best combination of low mass and low electrical resistivity, is perhaps the
ideal material for the application. The aspects of internal dimensioning
are all interrelated, and any attempt to optimize one will likely result in
a compromise elsewhere. For example, doubling the length of the ribbon
FIGURE 4-7
Correcting LF response
in a gradient microphone
through acoustical
attenuation between front
and back. Microphone with
screen (A); vector diagram
at LF (B); vector diagram at
HF (C).
Earg_04.qxd 14/9/04 2:38 PM Page 57