ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17266
Скачиваний: 51
5: First-Order Directional Microphones
83
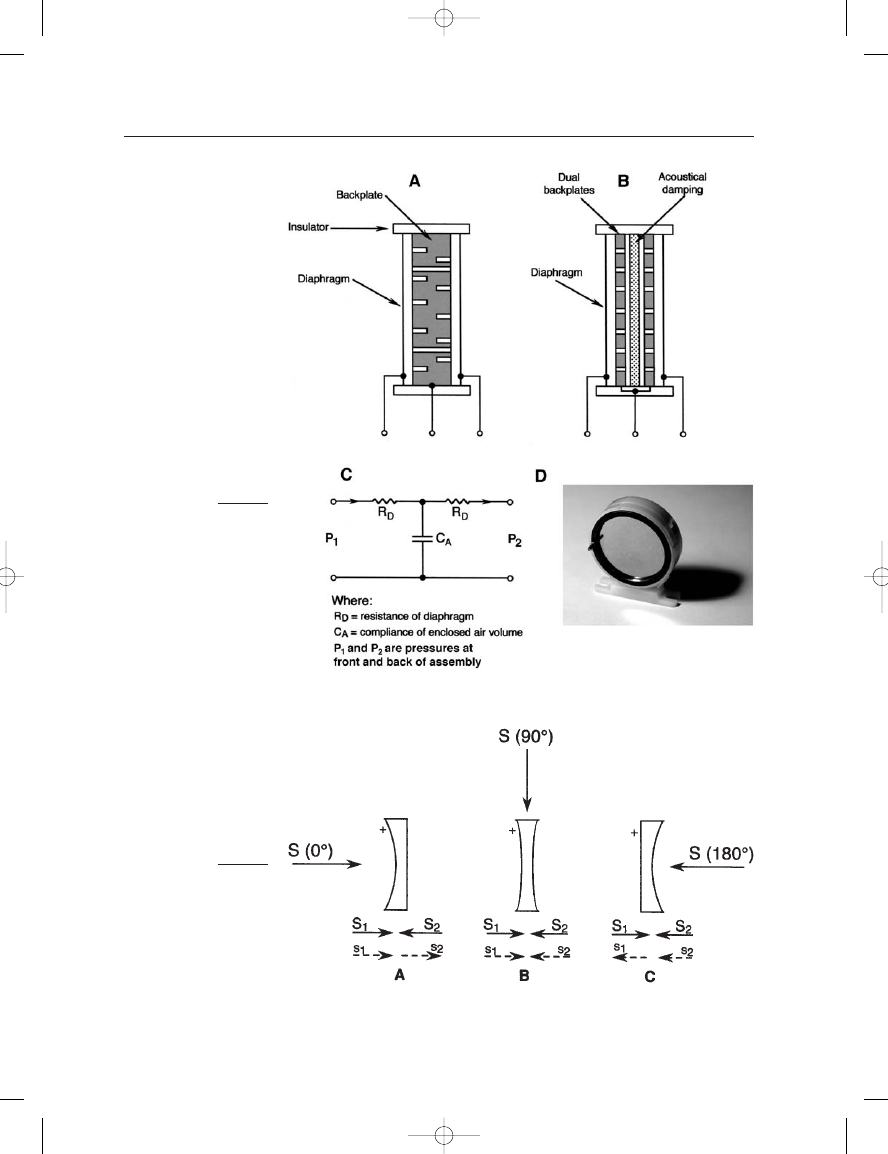
FIGURE 5–18
Section view of the basic
Braunmühl-Weber dual
diaphragm capacitor
microphone (A); an
equivalent design used
by AKG Acoustics (B);
simplified equivalent circuit,
impedance analogy
(C); view of typical dual
backplate capsule (D).
FIGURE 5–19
Vector diagrams showing
operation of the dual
diaphragm assembly; for
sound incident at 0
(A);
for sound incident at 90
(B); for sound incident at
180
(C).
Earg_05.qxd 14/9/04 2:40 PM Page 83
THE MICROPHONE BOOK
84
For a source at 0
, as shown at A, there will be the same set of vec-
tors plus and additional set of vectors (s
1
and s
2
) caused by the pressure
gradient effect at the microphone. These pressures will push the
diaphragms and enclosed air as a unit because of the interconnection
between the two sides of the backplate. The two sets of vectors will com-
bine as shown in the figure, and the two vectors on the back side (180
relative to the signal direction) will, through careful control of damping
and stiffness, cancel completely. Only the left diaphragm will move, pro-
ducing an electrical output. For sounds arriving at 180
, only the right
diaphragm will move, as shown at C. Since the back diaphragm is not
polarized there will be no electrical output.
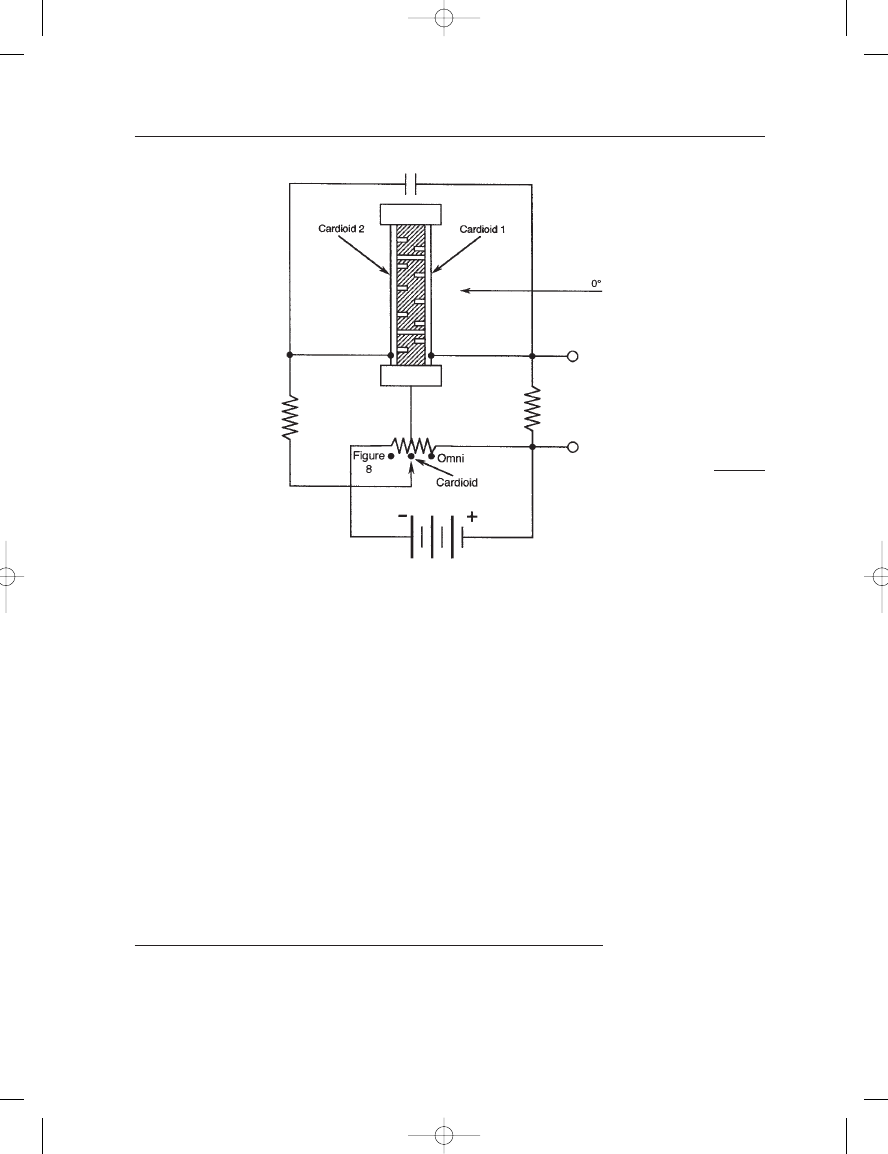
In effect, the assembly behaves as two back-to-back cardioid capaci-
tor microphones sharing a common backplate. If both diaphragms are
connected as shown in Figure 5–20 and independently polarized, the
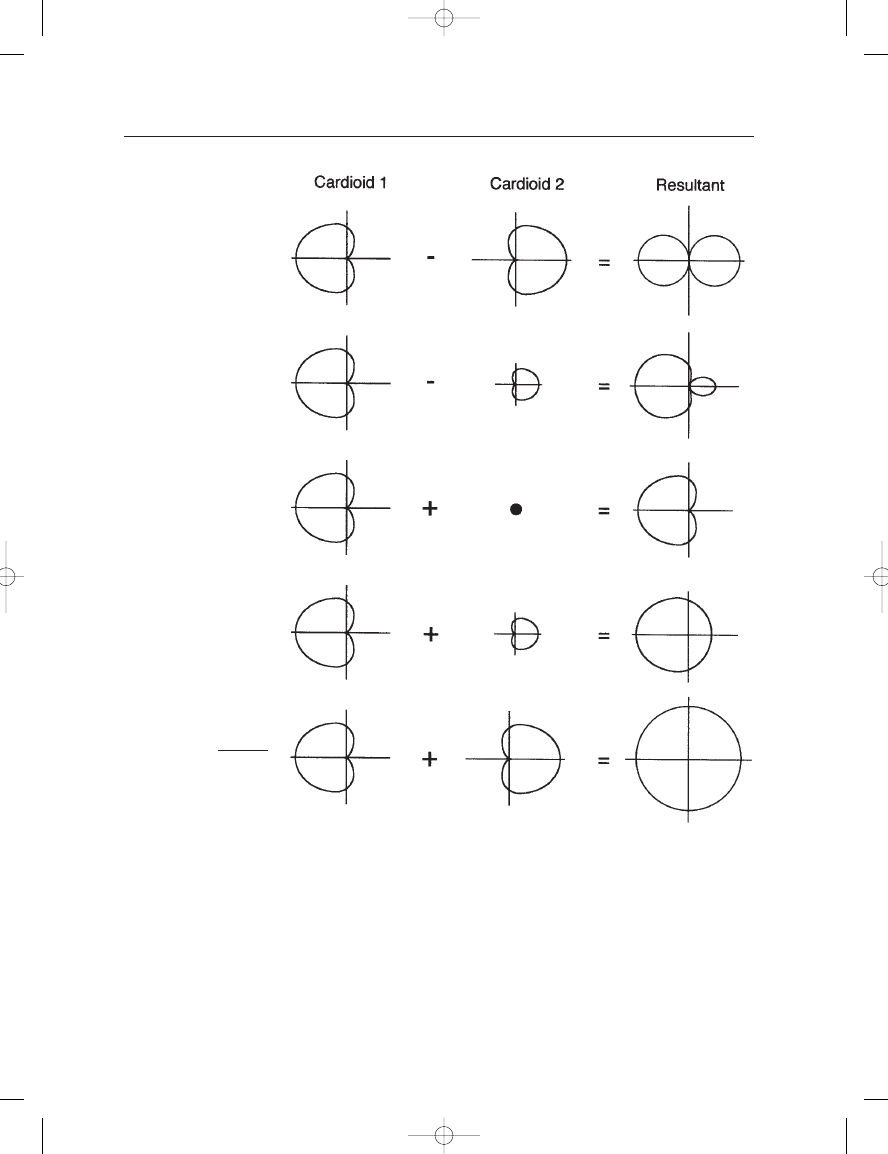
entire family of first-order patterns can be produced. The data shown in
Figure 5–21 illustrates how back-to-back cardioids can be added and
subtracted to produce the family of first-order cardioid patterns.
THE ELECTRO-VOICE VARIABLE-D
®
DYNAMIC MICROPHONE
Wiggins (1954) describes a novel variation on the standard dynamic
directional microphone. As discussed above under Proximity Effect in
Cardioid Microphones, the standard dynamic directional microphone
FIGURE 5–20
Electrical circuit for
combining the outputs of
the dual diaphragms and
producing the first-order
family of patterns.
Earg_05.qxd 14/9/04 2:40 PM Page 84
5: First-Order Directional Microphones
85
relies on a mass-controlled diaphragm in order to maintain the extended
LF response. Wiggins designed a dynamic microphone with a resistance-
controlled diaphragm and changed the normal single back path into a set
of three back paths to cover LF, MF, and HF actions separately, hence the
term Variable-D (standing for variable distance). The intent of the design
was to produce a wide-band directional dynamic microphone that exhib-
ited better LF response and greater resistance to handling noise and
mechanical shock than is typical of mass-controlled dynamic cardioids.
FIGURE 5–21
Combinations of dual
back-to-back cardioids 1
and 2 and their resultant
polar patterns.
Earg_05.qxd 14/9/04 2:40 PM Page 85
THE MICROPHONE BOOK
86
If a resistance-controlled diaphragm were to be used with a single
back path, the response would roll off at 6 dB/octave at LF. By succes-
sively lengthening the back path for lower frequencies in selective band-
pass regions, the necessary pressure gradient can be maintained, in each
frequency region, to produce flat output.
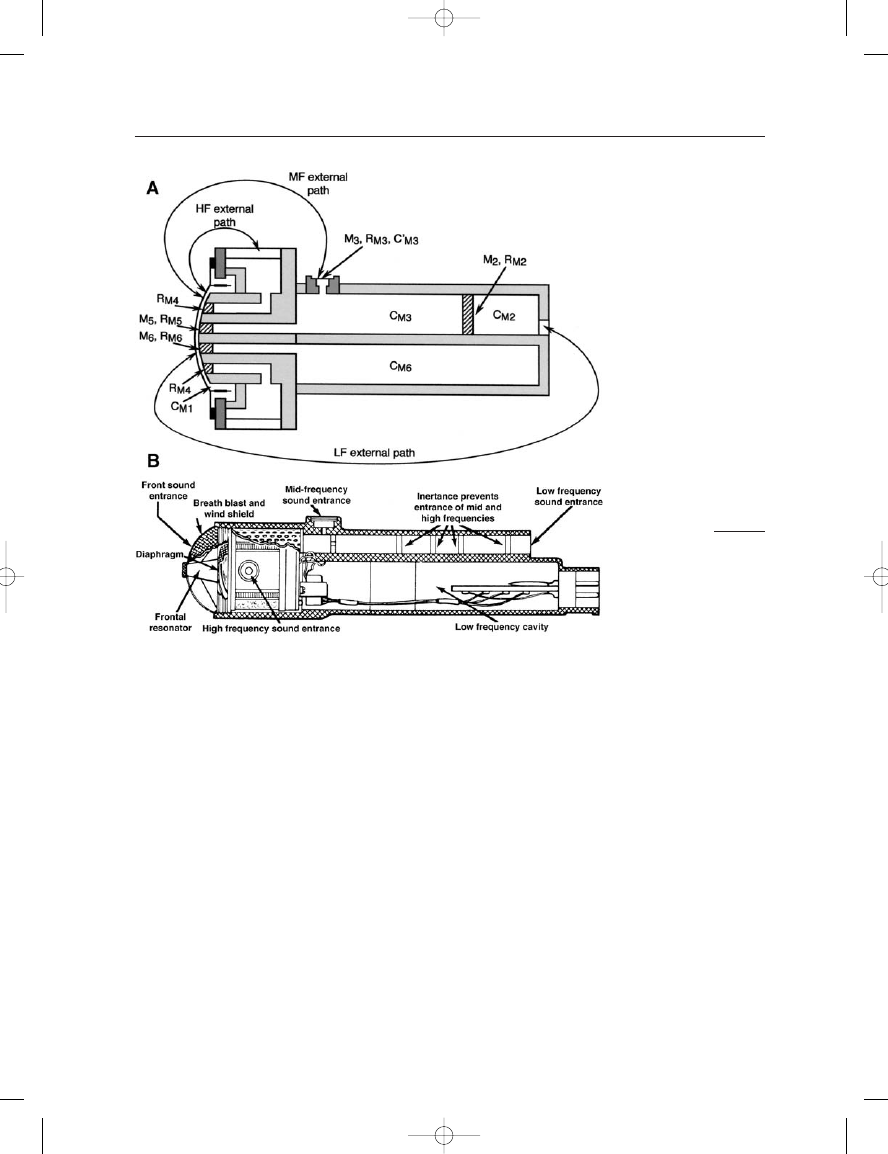
A schematic view of the microphone is shown in Figure 5–22A, and
the three back path distances (LF, MF, and HF) are clearly indicated. A
cutaway view of a typical Variable-D microphone is shown at B.
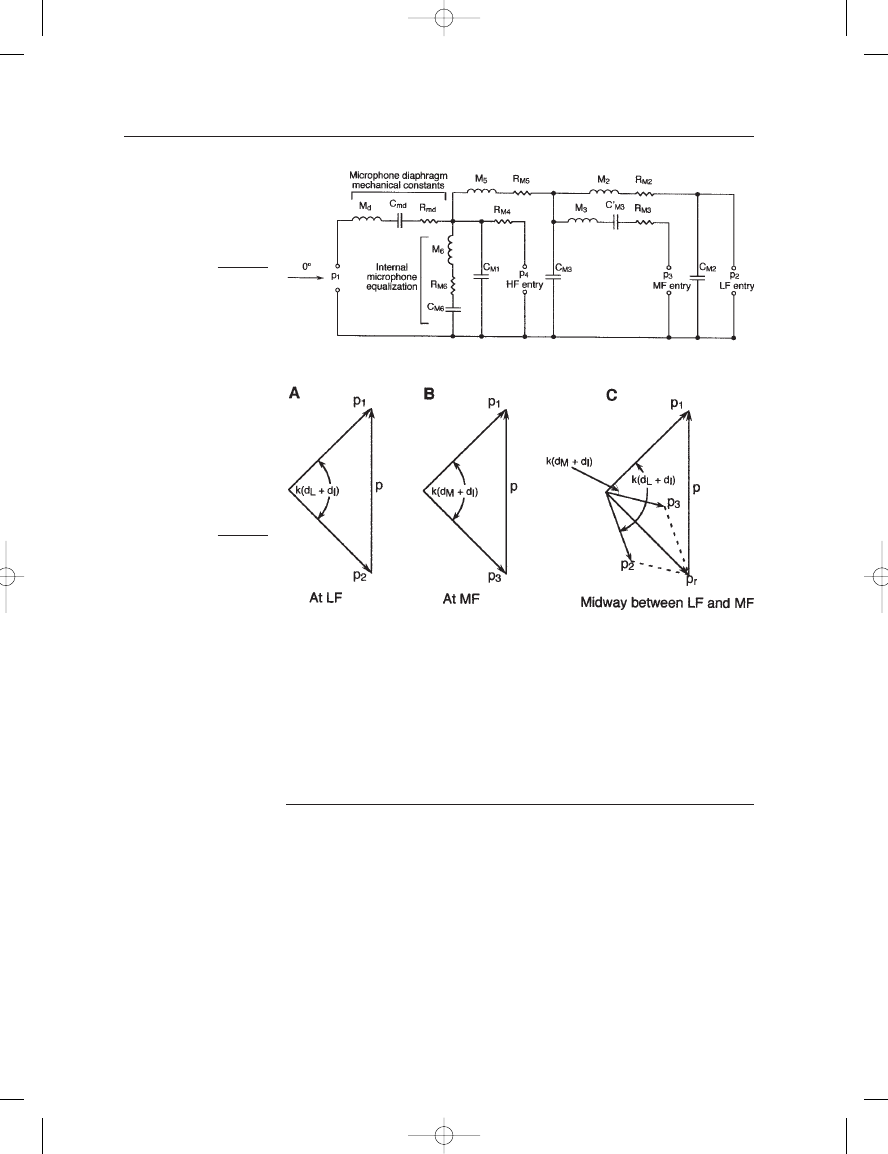
An equivalent circuit, shown in Figure 5–23, indicates the complex-
ity of the design in terms of acoustical filtering. The microphone works
by establishing a pressure gradient that is effectively uniform over a large
frequency range (about 200 Hz to 2 kHz). Since the driving force on the
diaphragm is constant over that range, the diaphragm assembly must be
resistance controlled for flat response. At higher frequencies flat on-axis
response is maintained by diffraction effects and careful attention to reso-
nances in the region of the diaphragm. The shunt path in the equivalent
circuit (M
6
, R
M6
and C
M6
) maintains flat LF response.
Figure 5–24 shows vector diagrams for LF action (A), MF action (B),
and at an intermediate frequency between the two (C). In these diagrams,
FIGURE 5–22
Schematic view of
Electro-Voice Variable-D
microphone (A); cutaway
view of a typical Variable-D
microphone (B). (Diagram
courtesy of Electro-Voice.)
Earg_05.qxd 14/9/04 2:41 PM Page 86
5: First-Order Directional Microphones
87
k is the wavelength constant, 2p/l; d
L
, d
M
, and d
I
are, respectively, the LF,
MF, and internal delay paths around and through the microphone. The
quantities k(d
L
d
I
) and k(d
M
d
I
) represent, respectively, the phase
shift in radians at LF and MF operation. Note that the value of the vector
p remains constant, indicating that the gradient is effectively independ-
ent of frequency over the range of Variable-D operation.
TWO-WAY MICROPHONES
A persistent problem in the design of single diaphragm directional micro-
phones is the maintenance of target pattern control at very low and very
high frequencies. Typical response is shown in Figure 5–25, where it is
clear that polar pattern integrity is compromised at both LF and HF. The
primary reason for this is the fall-off of the gradient component in the
microphone’s operation at the frequency extremes, as discussed in
Chapter 4 under The Capacitor Gradient Microphone. It is true that
more internal damping of the diaphragm would solve this problem, but
at a considerable loss of microphone sensitivity. One method for getting
around this problem is to design a two-way microphone with one section
for LF and the other for HF.
FIGURE 5–23
Equivalent circuit for
Variable-D microphone.
(Data after Robertson,
1963.)
FIGURE 5–24
Vector diagrams showing
operation of Variable-D
microphone. (Data after
Robertson, 1963.)
Earg_05.qxd 14/9/04 2:41 PM Page 87