ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17268
Скачиваний: 51
THE MICROPHONE BOOK
88
Weingartner (1966) describes such a two-way dynamic cardioid
design. In this design approach, the LF section can be optimized in its
damping to provide the necessary LF pattern control, while the HF section
can be optimized in terms of size and polar performance. It is essential
that the combining networks used to “splice” the two sections together
be carefully designed.
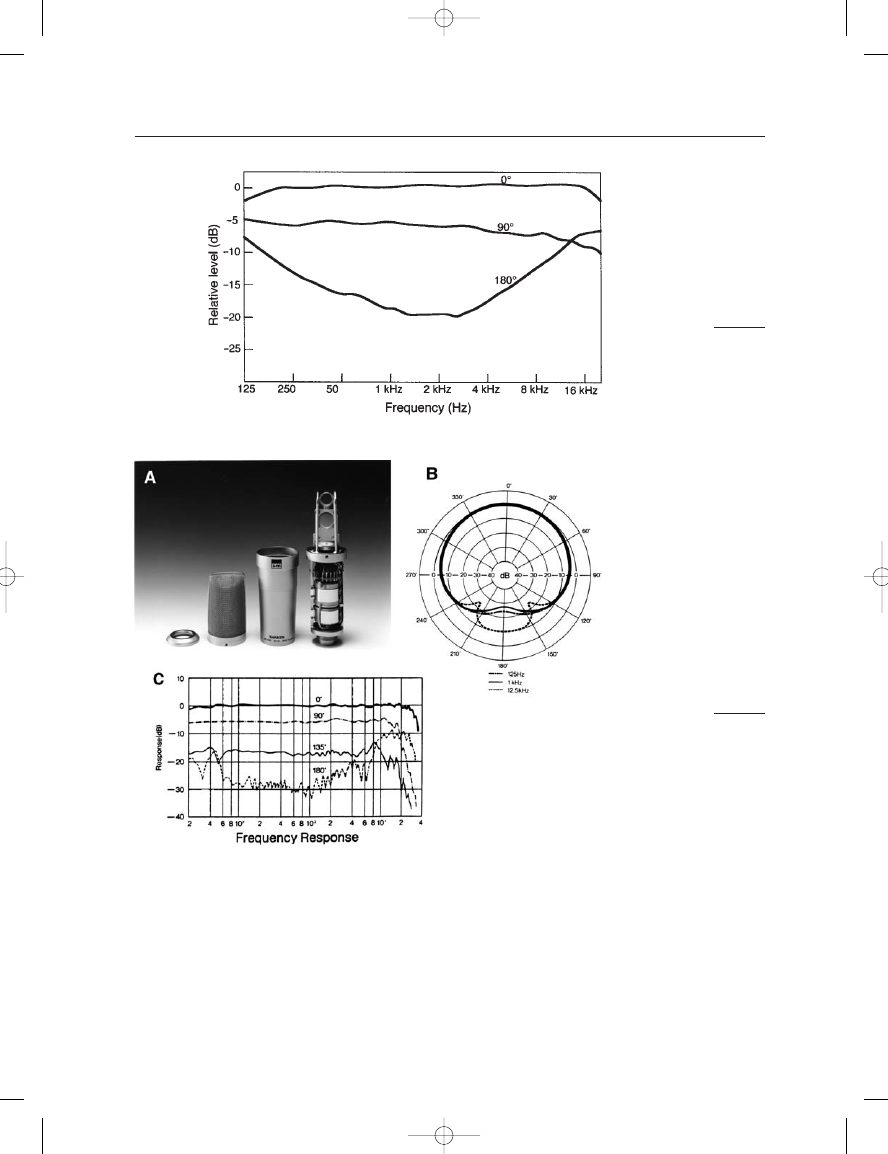
Perhaps the best known capacitor two-way design is the Japanese
Sanken CU-41, which is shown in Figure 5–26. The LF to HF crossover
FIGURE 5–25
Typical example of
on- and off-axis frequency
response curves for
single-diaphragm cardioid
microphones.
FIGURE 5–26
Details of the Sanken
CU-41 two-way
microphone. Disassembled
view (A); polar response
(B); on- and off-axis
frequency response curves
(C). (Figure courtesy of
Sanken.)
Earg_05.qxd 14/9/04 2:41 PM Page 88
5: First-Order Directional Microphones
89
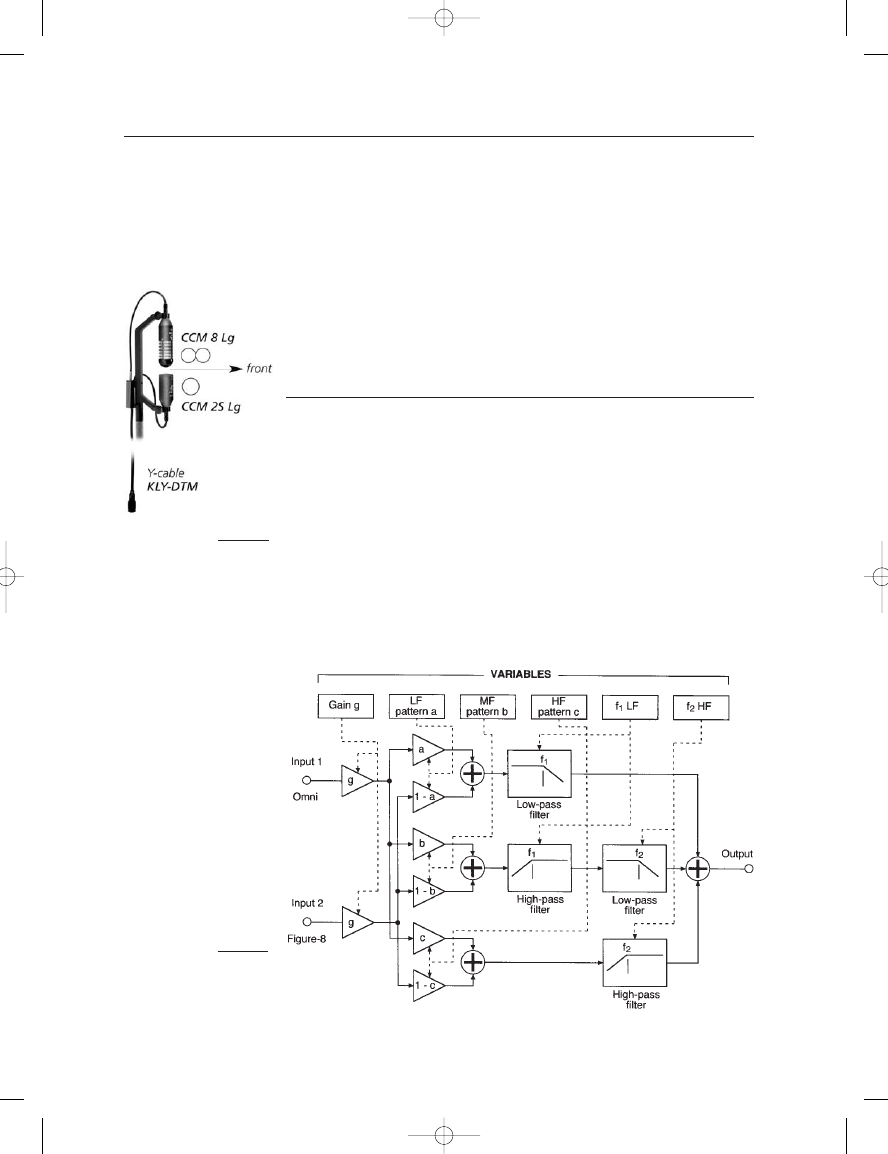
FIGURE 5–28
Polarflex signal flow
diagram. (Data after
Schoeps.)
frequency is 1 kHz, where the wavelength is about 0.3 m (12 in). Since
the internal component spacing is small compared to this wavelength,
accurate combining can be attained at all normal usage angles with mini-
mum pattern lobing. In optimizing the HF section of this microphone,
the
90 off-axis performance, the cardioid target value of 6 dB, has
been maintained out to 12.5 kHz, as can be seen in the family of off-axis
curves. Not many cardioid microphones routinely do this. The LF
parameters, independently adjusted, result in excellent pattern control to
well below 100 Hz.
ADDED FLEXIBILITY IN MICROPHONE
PATTERN CONTROL
In its Polarflex system, Schoeps has introduced a method of varying first-
order microphone patterns over a wide range. As we saw earlier, omni
and figure-8 patterns can be combined to create the entire family of first-
order cardioid patterns. Polarflex makes use of separate omni and figure-
8 elements and allows the user to combine them as desired over three
variable frequency ranges.
As an example, a user can “design” a microphone that is essentially
omnidirectional at LF, cardioid at MF, and supercardioid at HF. The
transition frequencies between these regimes of operation can be selected
by the user. Such a microphone would be useful in recording a large
performing group, orchestral or choral, by allowing the engineer to oper-
ate at a greater than normal distance while retaining the desired presence
FIGURE 5–27
Photo of Polarflex array
showing basic pattern
orientations. (Photo
courtesy Schoeps.)
Earg_05.qxd 14/9/04 2:41 PM Page 89
THE MICROPHONE BOOK
90
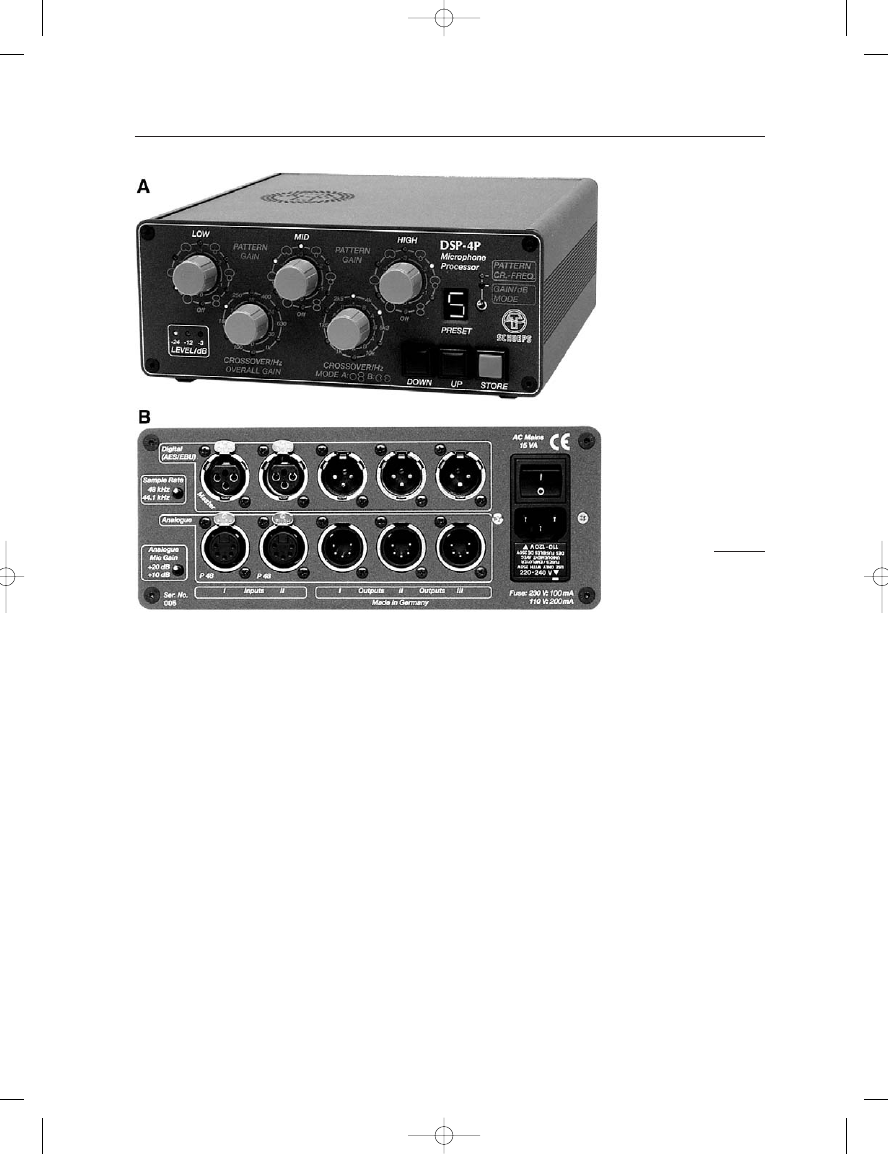
FIGURE 5–29
Front (A) and rear (B)
views of DSP-4P processor.
(Photos courtesy Schoeps.)
at MF and HF. Another application is in the studio, where the directional
characteristics and proximity effect of a vocal microphone can be
adjusted for individual applications.
Figure 5–27 shows the basic array. Note that there are both omni
and figure-8 elements closely positioned one atop the other. This basic
array constitutes in effect a single microphone, and for stereo pickup a
pair of such arrays will be required. The elements of the array are
processed via the circuit shown in Figure 5–28. The front and rear views
of the control module are shown in Figure 5–29.
Earg_05.qxd 14/9/04 2:41 PM Page 90
C
H
A
P
T
E
R
6
HIGH DIRECTIONALITY
MICROPHONES
INTRODUCTION
For many applications it is necessary to use a microphone with directional
properties exceeding those of the first-order cardioid family. In the film/
video industry, for example, dialog pickup on the shooting set is usually
done by way of an overhead boom microphone which must be clearly
out of the picture and may be two or more meters away from the actors.
Adequate pickup may depend on a highly directional microphone to
ensure both speech intelligibility and a subjective sense of intimacy.
Sports events and other activities with high ambient noise levels may
require highly directional microphones for noise immunity, and recording
in highly reverberant spaces may require such microphones to enhance
musical clarity. Field recording of natural events such as bird calls and the
like may call for operation at great distances; here, high directionality
microphones may be essential in attaining a usable recording.
High directionality microphones generally fall into three categories:
1. Interference-type microphones. These designs achieve high direction-
ality by providing progressive wave interference of high frequency
sound arriving off-axis, thus favoring sound arriving on-axis.
2. Focusing of sound by means of reflectors and acoustical lenses.
These designs are analogous to optical methods familiar to us all.
3. Second and higher-order designs. These microphones make use of
multiple gradient elements to produce high directionality.
INTERFERENCE-TYPE MICROPHONES
Olson (1957) describes a microphone consisting of a number of clus-
tered parallel tubes that differ in length by a fixed amount, as shown in
Earg_06.qxd 14/9/04 2:42 PM Page 91
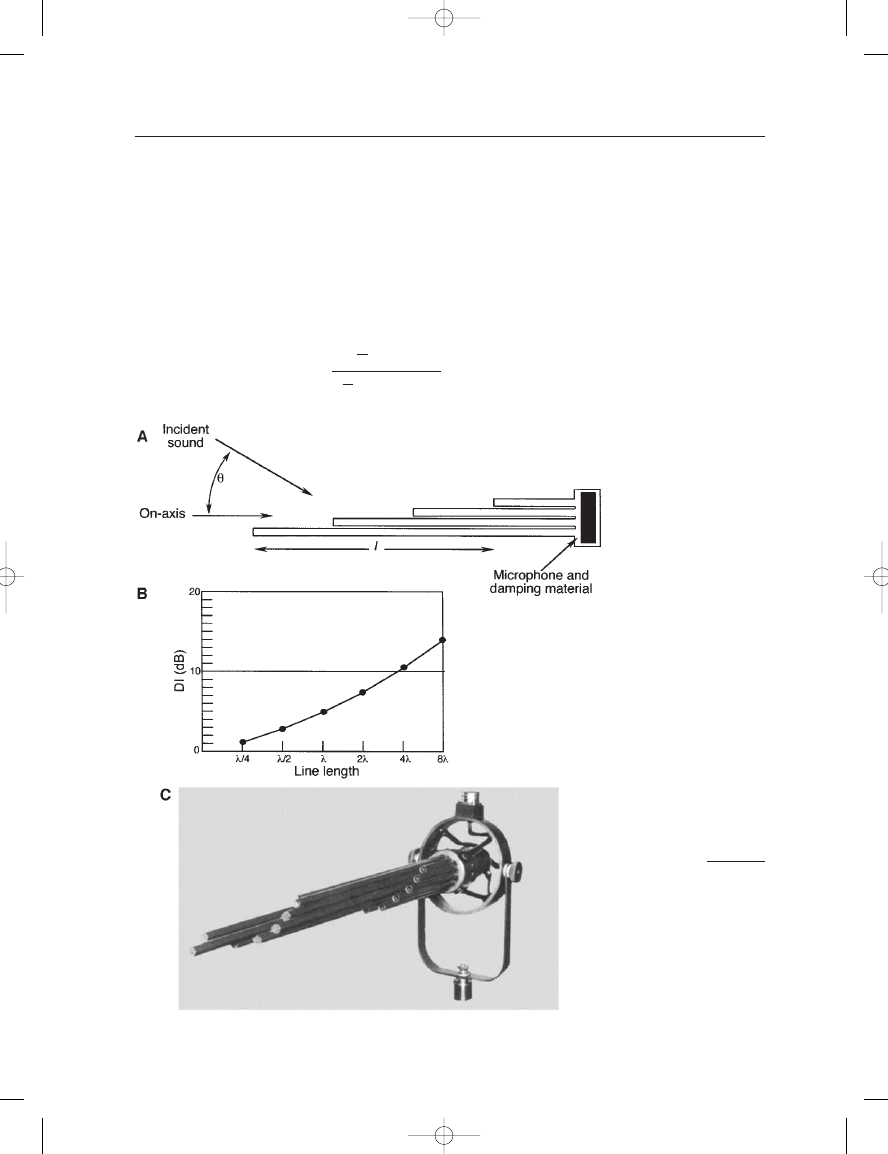
Figure 6–1A. A microphone transducer is located at the far end, where
all sound pickup is combined. For sound waves arriving at 0
incidence,
it is clear that the signal at the transducer will be, to a first approxima-
tion, the in-phase sum of all contributions. For sound waves arriving
from some arbitrary off-axis angle
, the sum will exhibit a degree of
phase cancellation of the contributions due to the differences in the
individual path lengths. Olson derives an equation that gives the net
sum at the transducer in terms of the received signal wavelength (
), the
overall length of the array (l), and the angle of sound incidence (
):
(6.1)
R
sin
(l
l
cos
)
(l
l
cos
)
THE MICROPHONE BOOK
92
FIGURE 6–1
Olson’s multiple tube
directional microphone;
physical view (A); plot of
DI as a function of overall
tube length and frequency
(B); photo of a multiple
tube directional
microphone (C). (Data
after Olson, 1957.)
Earg_06.qxd 11/10/04 3:43 PM Page 92