ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17270
Скачиваний: 51
The approximate directivity index (DI) for the array of tubes is shown in
Figure 6–1B as a function of array length and received signal wavelength.
For example, at 1 kHz the wavelength is approximately 0.3 m (12 in).
Thus, for an array length of 0.3 m the DI is about 5 dB. A photo of one
embodiment of the design is shown as C.
To a large extent, the complexity of the multi-tube array can be
replaced by the far simpler design shown in Figure 6–2A. Here, we can
imagine that the individual tubes have been superimposed on one another,
forming a single tube with multiple slot openings along its length. Such a
microphone as this is often termed a line microphone. In order to work,
the acoustical impedance at each opening must be adjusted so that sound,
once having entered the tube, does not readily exit at the next opening,
but rather propagates along the tube in both directions. Some designs
make use of external protruding baffles, or fins, which provide HF
resonant cavities that help to maintain off-axis HF response.
Because of its obvious physical appearance, the single-tube line micro-
phone is commonly referred to as a “rifle” or “shotgun” microphone, and
it is in this form that most commercial high-directionality microphones are
designed today. As a general rule, the line section of the microphone is
6: High Directionality Microphones
93
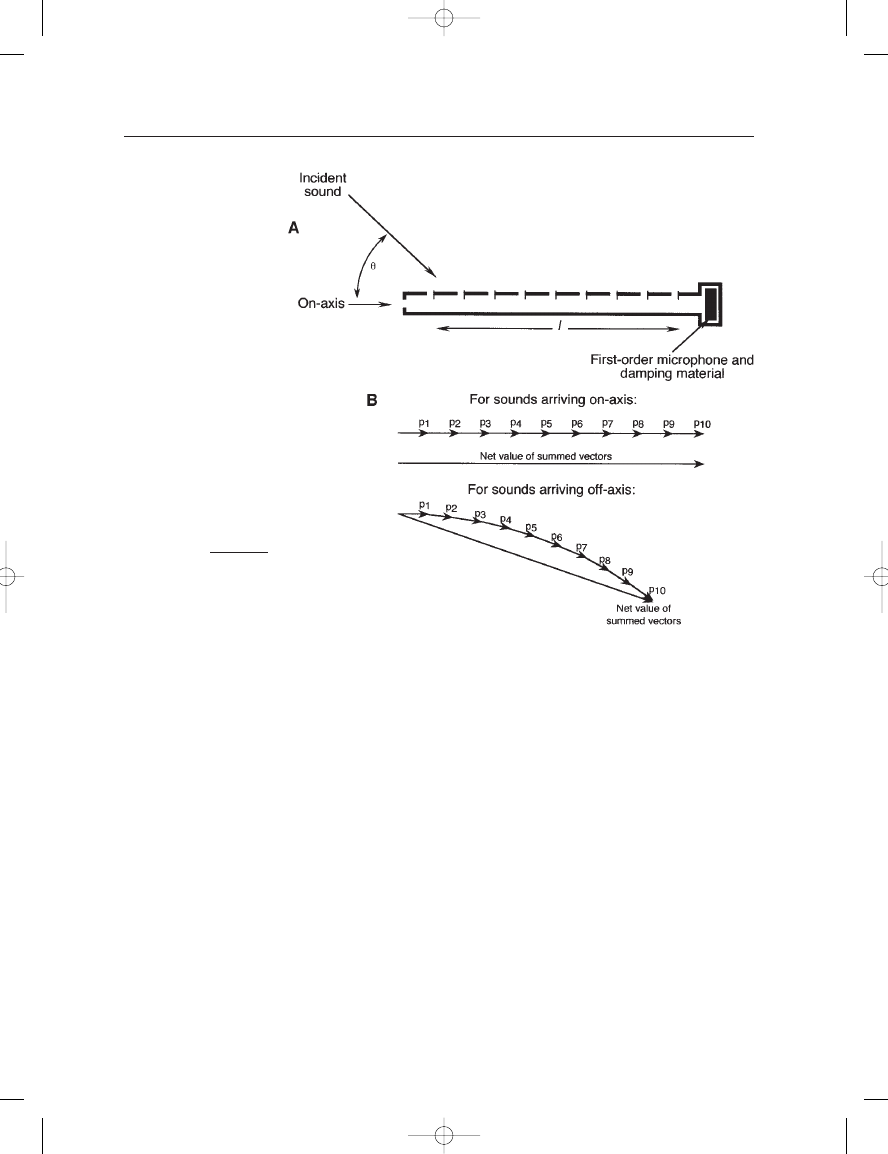
FIGURE 6–2
A single tube line
microphone (A); vector
diagram for on- and
off-axis operation (B).
Earg_06.qxd 14/9/04 2:42 PM Page 93
added to a standard hypercardioid microphone, and it acts to increase the
DI of the hypercardioid above a frequency inversely proportional to the
length of the line.
A vector representation of the operation of the line microphone is
shown in Figure 6–2B. For on-axis operation (
0) the individual sig-
nal vectors are in phase and add to create a reference response vector, p.
For sounds arriving slightly off-axis the individual vectors will be slightly
displaced from each other in phase angle, and the vector summation will
exhibit a reduction in level along with a lagging phase angle, relative to
on-axis arrival. For sounds arriving considerably off-axis the angular dis-
placement of individual phasors will be greater, and the vector summation
will be even less.
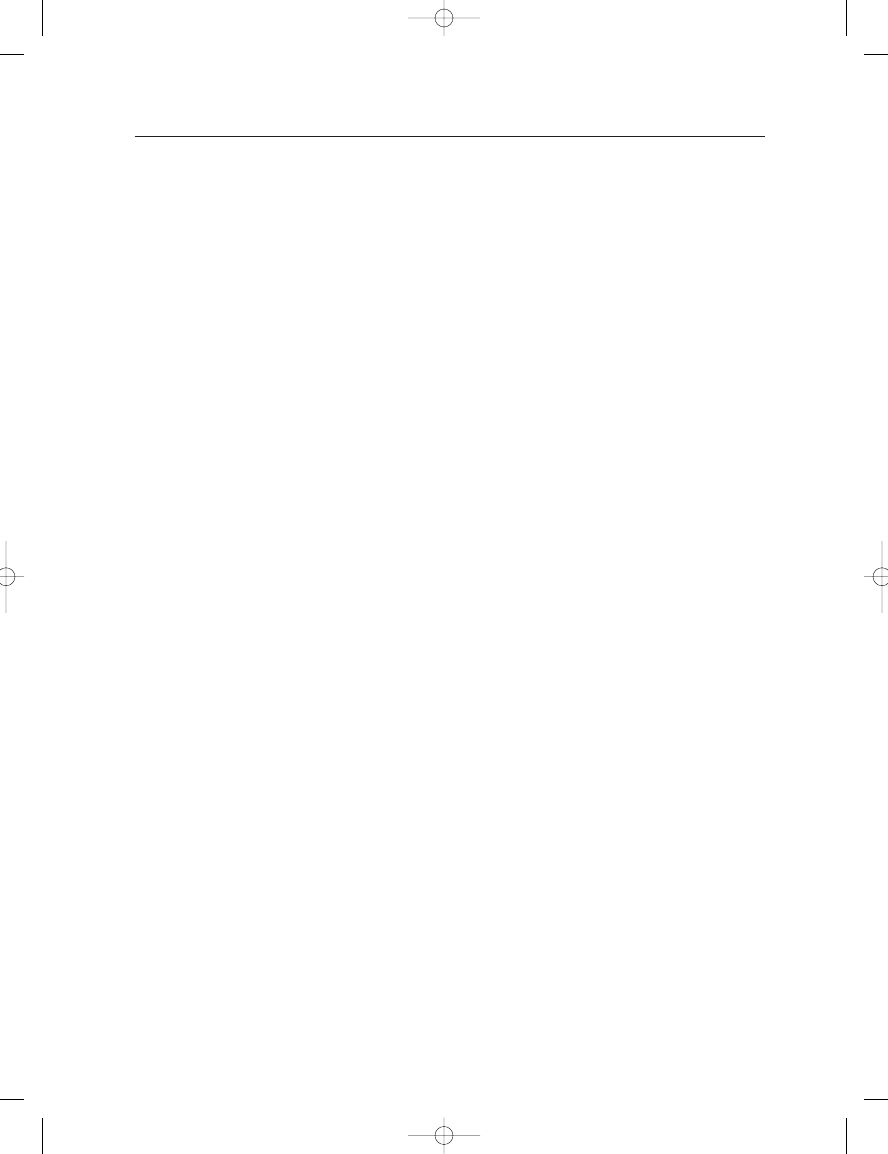
These observations are borne out in measurements on commercial
microphones. Figure 6–3A shows the AKG Model C 468 line microphone,
which is available with one line section or with two, at the user’s choice.
The length of the microphone with a single section is 17.6 cm (7 in), and the
length with two sections is 31.7 cm (12.5 in). Corresponding DI plots are
shown at B. It can be seen that the DI data broadly follows that shown
in Figure 6–4A.
The audio engineer in search of a high-directionality line micro-
phone must perform the relevant calculations to make sure that a given
microphone model is appropriate to the task at hand. The shorter mod-
els on the order of 30 cm (11 in) may produce the desired directionality
at 4 kHz and above, but to maintain this degree of directionality at, say,
700 Hz, would require a line microphone some two meters in length!
Not many line microphones have been designed to meet these require-
ments. One notable line microphone from the 1960s, the ElectroVoice
Model 643 “Cardiline,” had a length of 2.2 m (86 in). Many commercial
line microphones have an operating length of little more than 0.2 m
(8 in). Obviously, an operating point somewhere between these extremes
will yield the best combination of directional performance and conven-
ience of field operation and flexibility.
ESTIMATING THE PERFORMANCE OF A LINE MICROPHONE
The DI of a line microphone at low frequencies is simply the DI of the
basic transducing mechanism, normally a hypercardioid element with its
characteristic DI of 6 dB. As frequency increases, there is a point at which
the line takes over and above which the DI tends to rise approximately
3 dB per doubling of frequency. That approximate frequency is given by
Gerlach (1989):
f
0
c/2l
(6.2)
where c is the speed of sound and l is the length of the line section of the
microphone (c and l expressed in the same system of units). Figure 6–4A
presents a graph showing the rise in DI as a function of frequency for a
line microphone of any length l. The relation between f
0
and l is given in
THE MICROPHONE BOOK
94
Earg_06.qxd 14/9/04 2:42 PM Page 94
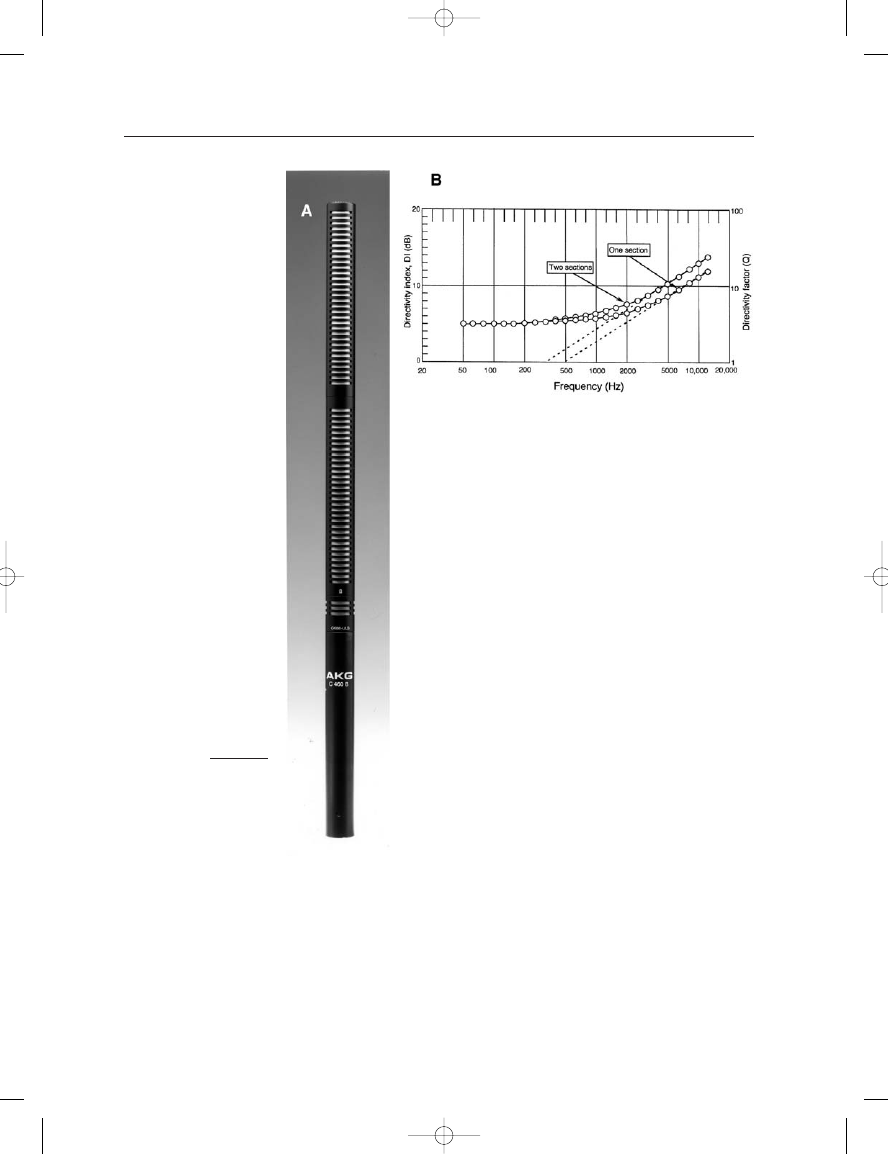
equation (6.1) and, for a given microphone, f
0
may be read directly from
the data shown in Figure 6–4B. For example, assume that a line micro-
phone has a line section that is 200 mm (8 in) long. From Figure 6–4B we
can read directly the value of 900 Hz for f
0
. Now, examining Figure
6–4A, we note that, if the microphone has a base hypercardioid element,
the effect of the line will only become apparent above about 3f
0
, or about
2700 Hz.
6: High Directionality Microphones
95
FIGURE 6–3
Views of the AKG C
468 line microphone (A);
DI plots for single and
double sections (B). (Figure
courtesy of AKG Acoustics.)
Earg_06.qxd 14/9/04 2:42 PM Page 95
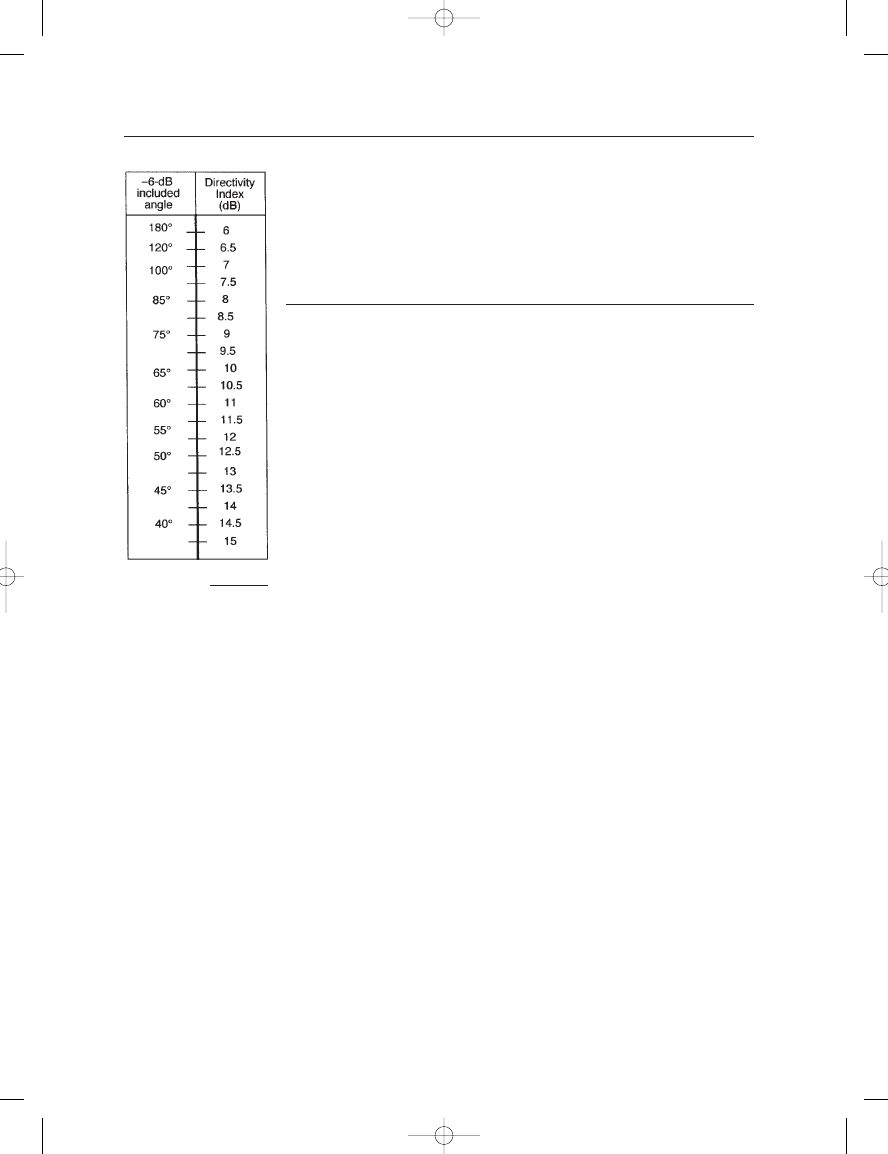
When microphone directional performance is presented directly by
way of polar plots, the DI may be estimated by noting the included angle
between the
6 dB beamwidth values and entering that included angle
into the nomograph shown in Figure 6–5. (Note: Beamwidth is defined
here as the angular width of microphone pickup over which the response
loss is no greater than
6 dB, relative to the on-axis value.)
PARABOLIC REFLECTORS AND ACOUSTIC LENSES
Figure 6–6A shows a section view of a parabolic reflector microphone,
as described by Olson (1957). Polar response is shown in Figure 6–6B,
and DI is shown at C. It can be appreciated how cumbersome such
microphones are to transport and use. However, microphones of this
type are used in field nature recording activities as well as in certain
surveillance activities, because the directional beamwidth at very high
frequencies can be quite narrow.
THE MICROPHONE BOOK
96
FIGURE 6–4
Directional performance
of a line microphone;
directivity index of a line
microphone as a function
of line length (A);
determining the value
of f
0
as a function of line
length, l (B).
Earg_06.qxd 14/9/04 2:42 PM Page 96
A microphone based on the acoustic lens principle is shown in
Figure 6–7 (Olson, 1957). Here, the lens acts as a converging element,
focusing parallel rays of sound onto a transducer located at the focus of
the lens. It is clear that a microphone such as this is of little practical use,
and we show it primarily as an example of the acoustical lens principle.
SECOND- AND HIGHER-ORDER MICROPHONES
As we have seen in previous chapters, the basic family of directional
microphones are referred to as first-order, inasmuch as the directional
response is proportional to the first power of a cosine term. A second-
order response pattern has directivity that is proportional to the square
of the cosine term. Stated differently, a first-order microphone has
response that is proportional to the pressure gradient, whereas a second-
order design has response proportional to the gradient of the gradient.
The principle of the second-order microphone is developed as shown
in Figure 6–8. At A, we show the physical circuit of a first-order cardioid
microphone as a basis for comparison. The directional response of this
microphone is given as
0.5(1 cos ), where represents the bear-
ing angle of sound arriving at the microphone.
If two such first-order microphones are placed very close together
and their outputs subtracted from each other, we have their equivalent
physical circuit as shown at B, and the directional response will be
(0.5 cos )(1 cos ). The directional pattern is shown at C in both
linear and log (decibel) polar plots.
As we have seen in earlier chapters, the effective gradient distance
between front and back openings in a first-order microphone (D) is quite
small, perhaps no more than a centimeter or so. The requirement for an
additional gradient distance, D
, calls for extreme measures if this dis-
tance is to be minimized. Effective second-order microphones can be
made to work out to perhaps 6 or 8 kHz, with diminished second-order
effect above that point.
The general directional equation for a second-order microphone is:
(A B cos )(A B cos )
(6.3)
where A
B 1 and A B 1.
At present, second-order microphones are rarely used in the record-
ing studio, and their major application is in the area of close-speaking,
noise canceling operations in difficult communications environments.
Proximity effect is a problem in that it rises at a rate of 12 dB/octave at
low frequencies, rendering these microphones very sensitive to wind
effects and close placement to sound sources. Woszczyk (1984) discusses
some studio applications in detail.
As examples of second-order response, we show pertinent data for
two designs:
(0.5 0.5 cos )(0.5 0.5 cos ) (see Figure 6–9) and
cos
2
(see Figure 6–10).
6: High Directionality Microphones
97
FIGURE 6–5
Determining approximate
directivity index (DI)
when the nominal
6 dB
beamwidth of the
microphone is given; for a
given polar pattern, strike
off the included angle over
which the response is no less
than
6 dB relative to 0 dB
on-axis; then, using the
nomograph, read directly
the DI in dB.
Earg_06.qxd 14/9/04 2:42 PM Page 97