ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17239
Скачиваний: 51
2: Basic Sound Transmission and Operational Forces on Microphones
13
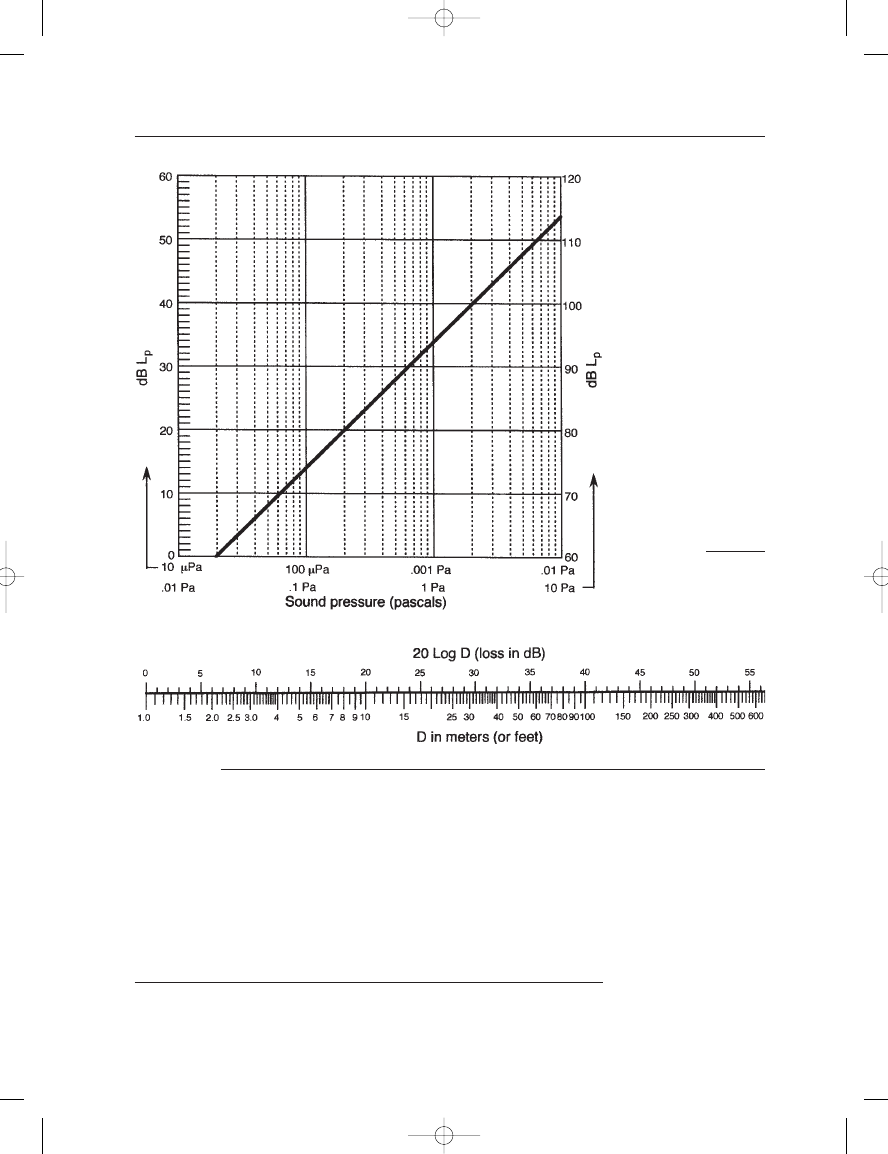
The graph in Figure 2–6 shows the relationship between pressure in
Pa and L
P
. The nomograph shown in Figure 2–7 shows the loss in dB
between any two reference distances from a point source in the free field.
Referring once again to equation (2.4), we will now calculate the
sound pressure level of one acoustical watt measured at a distance of 1 m
from a spherically radiating source:
L
P
20 log (5.69/0.00002) 109 dB
It can be appreciated that one acoustical watt produces a consider-
able sound pressure level. From the nomograph of Figure 2–7, we can
see that one acoustical watt, radiated uniformly and measured at a
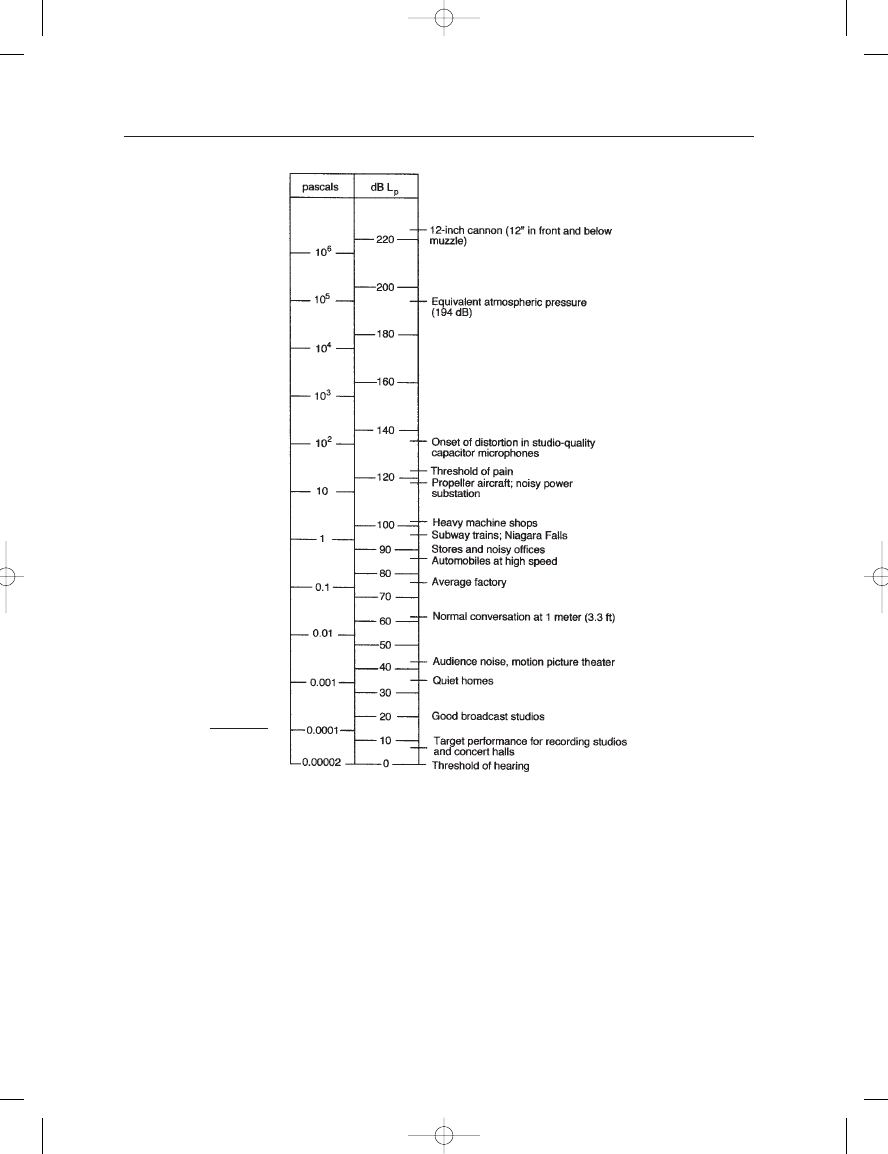
FIGURE 2–5
Sound pressure levels of
various sound sources.
Earg_02.qxd 14/9/04 2:35 PM Page 13
THE MICROPHONE BOOK
14
distance of 10 m (33 feet), will produce L
P
89 dB. How “loud” is a
signal of 89 dB L
P
? It is approximately the level of someone shouting in
your face!
THE REVERBERANT FIELD
A free field exists only under specific test conditions. Outdoor conditions
may approximate it. Indoors, we normally observe the interaction of a
FIGURE 2–6
Relationship between
sound pressure and sound
pressure level.
FIGURE 2–7
Inverse square sound pressure level relationships as a function of distance from the source; to determine the level difference
between sound pressures at two distances, located the two distances and then read the dB difference between them; for
example, determine the level difference between distances 50 m and 125 m from a sound source; above 50 read a level of
34 dB; above 125 read a level of 42 dB; taking the difference gives 8 dB.
Earg_02.qxd 14/9/04 2:35 PM Page 14
2: Basic Sound Transmission and Operational Forces on Microphones
15
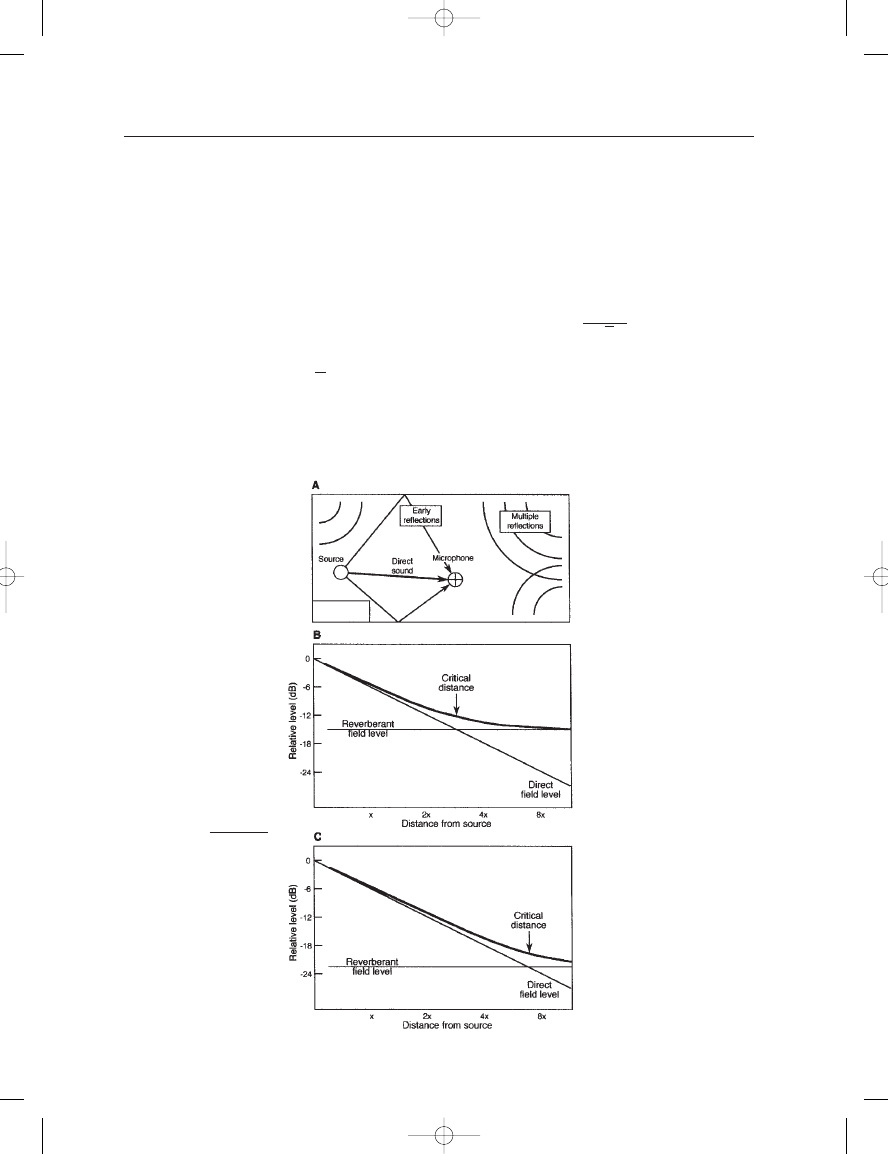
direct field and a reverberant field as we move away from a sound
source. This is shown pictorially in Figure 2–8A. The reverberant field
consists of the ensemble of reflections in the enclosed space, and rever-
beration time is considered to be that time required for the reverberant
field to diminish 60 dB after the direct sound source has stopped.
There are a number of ways of defining this, but the simplest is given
by the following equation:
(2.8)
where V is the room volume in m
3
, S is the interior surface area in m
2
,
and
is the average absorption coefficient of the boundary surfaces.
The distance from a sound source to a point in the space where both
direct and reverberant fields are equal is called critical distance (D
C
).
In live spaces critical distance is given by the following equation:
Reverberation
time
(s)
0.16
V
S
FIGURE 2–8
The reverberant field.
Illustration of reflections
in an enclosed space
compared to direct sound
at a variable distance from
the sound source (A);
interaction of direct and
reverberant fields in a live
space (B); interaction of
direct and reverberant
fields in a damped
space (C).
Earg_02.qxd 14/9/04 2:35 PM Page 15
THE MICROPHONE BOOK
16
(2.9)
where Q is the directivity factor of the source. We will discuss this topic
in further detail in Chapter 17.
In a live acoustical space,
may be in the range of 0.2, indicating
that, on average, only 20% of the incident sound power striking the
boundaries of the room will be absorbed; the remaining 80% will reflect
from those surfaces, strike other surfaces, and be reflected again. The
process will continue until the sound is effectively damped out.
Figures 2–8B and C show, respectively, the observed effect on sound
pressure level caused by the interaction of direct, reflected, and reverber-
ant fields in live and damped spaces.
Normally, microphones are used in the direct field or in the transi-
tion region between direct and reverberant fields. In some classical
recording operations, a pair of microphones may be located well within
the reverberant field and subtly added to the main microphone array for
increased ambience.
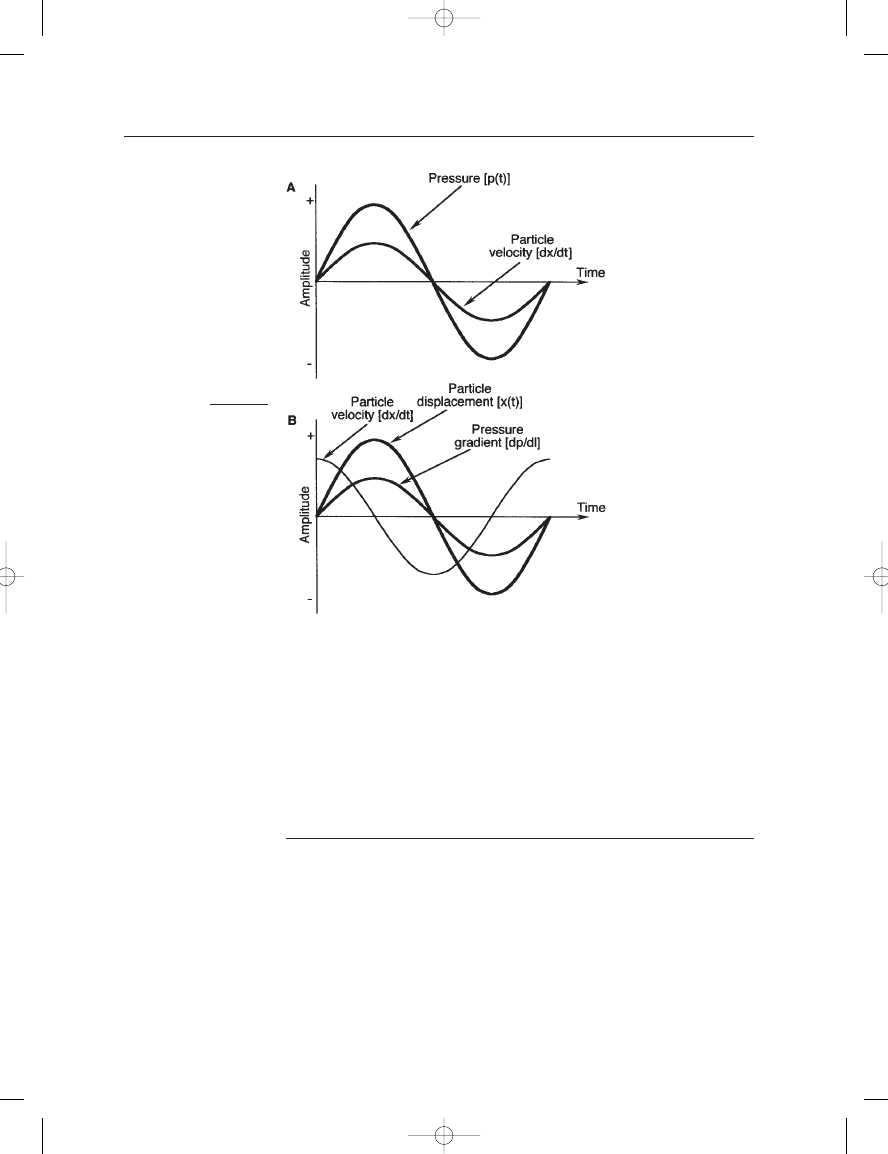
SOUND IN A PLANE WAVE FIELD
For wave motion in a free plane wave field, time varying values of sound
pressure will be in phase with the air particle velocity, as shown in
Figure 2–9. This satisfies the conditions described in Table 2.1, in which
the product of pressure and air volume velocity define acoustical power.
(Volume velocity may be defined here as the product of particle velocity
and the area over which that particle velocity is observed.)
If a microphone is designed to respond to sound pressure, the con-
ditions shown in Figure 2–9A are sufficient to ensure accurate reading of
the acoustical sound field.
Most directional microphones are designed to be sensitive to the air
pressure difference, or gradient, existing between two points along a
given pickup axis separated by some distance l. It is in fact this sensitiv-
ity that enables these microphones to produce their directional pickup
characteristics. Figure 2–9B shows the phase relationships at work here.
The pressure gradient [dp/dl] is in phase with the particle displacement
[x(t)]. However, the particle displacement and particle velocity [dx/dt]
are at a 90
phase relationship.
These concepts will become clearer in later chapters in which we
discuss the specific pickup patterns of directional microphones.
SOUND IN A SPHERICAL WAVE FIELD
Relatively close to a radiating sound source, the waves will be more or
less spherical. This is especially true at low frequencies, where the differ-
ence in wavefront curvature for successive wave crests will be quite
pronounced. As our observation point approaches the source, the phase
D
C
0.14
QS
Earg_02.qxd 14/9/04 2:35 PM Page 16
2: Basic Sound Transmission and Operational Forces on Microphones
17
angle between pressure and particle velocity will gradually shift from zero
(in the far field) to 90
, as shown in Figure 2–10A. This will cause an
increase in particle velocity with increasing phase shift, as shown at B.
As we will see in a later detailed discussion of pressure gradient
microphones, this phenomenon is responsible for what is called proxim-
ity effect, the tendency of directional microphones to increase their LF
(low frequency) output at close operating distances.
EFFECTS OF HUMIDITY ON SOUND TRANSMISSION
Figure 2–11 shows the effects of both inverse square losses and HF losses
due to air absorption. Values of relative humidity (RH) of 20% and 80%
are shown here. Typical losses for 50% RH would be roughly halfway
between the plotted values shown.
For most studio recording operations HF losses may be ignored.
However, if an organ recording were to be made at a distance of 12 m in
a large space and under very dry atmospheric conditions, the HF losses
could be significant, requiring an additional HF boost during the record-
ing process.
FIGURE 2–9
Wave considerations
in microphone
performance: relationship
between sound pressure
and particle velocity (A);
relationship among air
particle velocity, air particle
displacement, and pressure
gradient (B); relationship
between pressure and
pressure gradient (C) (Data
presentation after
Robertson, 1963).
Earg_02.qxd 14/9/04 2:35 PM Page 17