Файл: Курсовая работа по теоретической механике Исследование движения механической системы.docx
Добавлен: 22.11.2023
Просмотров: 54
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
Государственный университет «Дубна»
Кафедра ИСАУ
КУРСОВАЯ РАБОТА
по теоретической механике
Исследование движения механической системы.
Теорема об изменении кинетической энергии системы
Вариант № 13
Выполнил:
студент 2 курса группы 2231
Самченко Михаил Григорьевич
Принял:
Доцент Симоненко В.Г.
Аттестация (оценка, баллы)
-----------------------------------------------
Дубна
2023
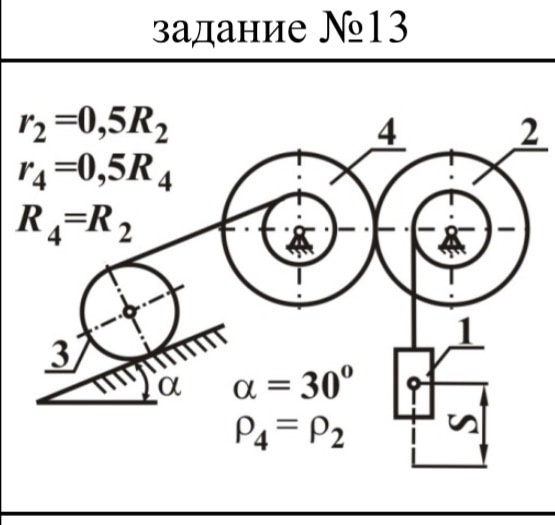
Таблица значений
| № вар. |  |  |  |  |  |  |  |  |  | S |
| | кг | кг | кг | см | см | см | см | | см | м |
| 13 |  |  | | 20 | 20 | 15 | - | - | 0,2 | 3 |
Найти:

Решение:
Механическая система состоит из 4 тел:
1-ое тело – груз,
2-ое тело – блок,
3-ее тело – колесо,
4-ое тело – блок.
Для решения задачи применим теорему об изменении кинетической энергии в интегральной форме:
где
 это кинетическая энергия системы в начальный момент времени;
это кинетическая энергия системы в начальный момент времени;Т — это кинетическая энергия системы в конечный момент времени;
— сумма работ внешних сил;

к — сумма работ внутренних сил;
Так как в начальный момент система находилась в покое, то
 , и так как система неизменяемая (внутренние силы не совершают работу), то
, и так как система неизменяемая (внутренние силы не совершают работу), то  .
.Значит, теорему можем записать в виде:
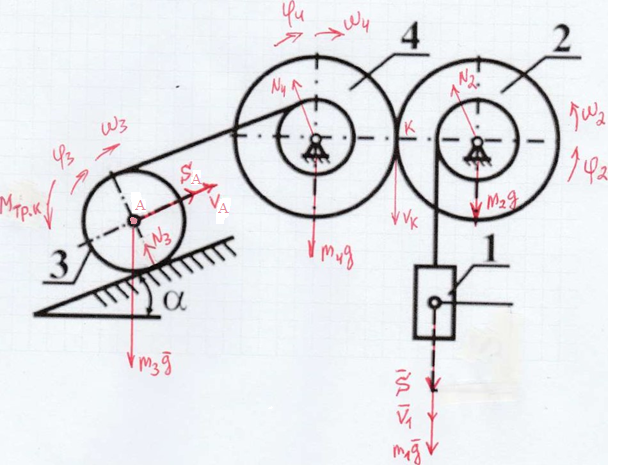
Покажем все линейные и угловые скорости в механической системе.
Составим кинематические соотношения для скоростей, выражая все через линейную скорость первого тела
 , и перемещений, выражая все
, и перемещений, выражая всечерез перемещение первого тела

Кинематические соотношения для скоростей:
 ;
; 
 ;
;  ;
; 
Кинематические соотношения для перемещений:

;
Определим кинетическую энергию системы в текущий момент времени,
т.е. когда тело 1 совершит перемещение
 . Она зависит от кинетической
. Она зависит от кинетическойэнергии каждого из тел, входящих в механическую систему:
Т=Т1+Т2+Т3+ Т4
где
 — кинетическая энергия какого-то k-ого тела, зависящая от вида движения и формы тела:
— кинетическая энергия какого-то k-ого тела, зависящая от вида движения и формы тела:1-ое тело совершает поступательное движение;
2-ое тело совершает вращательное движение;

3-ое тело совершает плоское движение;

4-ое тело совершает вращательное движение;

где моменты инерции вращающихся тел разложили в зависимости от вида
движения и формы тела:
 ;
;  ;
;
Получаем общую кинетическую энергию всей системы:

Изображаем на схеме все внешние силы системы:
Тело 1 -
 Тело 2—
Тело 2— 
Тело З -
 Тело 4—
Тело 4—
Определяем работы внешних сил на перемещении точек их приложения:








Работа всей системы:

т.к
 со знаком “-”, следовательно, фактически система движется в противоположном направлении.
со знаком “-”, следовательно, фактически система движется в противоположном направлении.Определим величину линейной скорости
 :
:
Подставляя все полученные зависимости в уравнение теоремы, определяем
: