ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 26
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное образовательное учреждение
высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Высшая школа электроники и компьютерных наук
Кафедра «Автоматика и управление»
Следящая система механизма продольной подачи станка с ЧПУ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКАК КУРСОВОМУ ПРОЕКТУ
По дисциплине «Технические средства автоматизации и управления»
Вариант 11
ЮУрГУ– 270304.2021.432.ПЗ КП
| Нормоконтролер ___________ Абдуллин В.В. «____» _______2021 г. | Руководитель ____________ Абдуллин В.В. «____» ________ 2021 г. |
| | Автор работы студент группы КЭ-417 _________/ Каштанова А.В. «____»________ 2021 г. |
| | Работа защищена с оценкой ______________ «____» ________ 2021 г. |
Челябинск 2021
Министерство науки и высшего образования Российской Федерации
Федеральное государственное образовательное учреждение
высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Высшая школа электроники и компьютерных наук
Кафедра «Автоматика и управление»
ЗАДАНИЕ
на курсовой проект студента
Каштановой Анастасии Викторовны
Группа КЭ – 417
1 Дисциплина: Технические средства автоматизации и управления
2 Тема работы: Следящая система механизма продольной подачи станка с ЧПУ
3 Выдано: 15.02.2021 г.
Срок выполнения: 15.04.2021 г.
4 Номер варианта 11
Исходные данные по варианту:
-
Исполнительный механизм – тип двигателя ПН; -
Точность системы – 0.15 [мм] -
Максимальная скорость ( ) – 25 [мм/с]
) – 25 [мм/с] -
Максимальное ускорение ( ) – 250 [мм/с2]
) – 250 [мм/с2] -
Время переходного процесса системы ( ) – 0.25 [с]
) – 0.25 [с] -
Перерегулирование системы ( ) – 15 [%]
) – 15 [%] -
Момент нагрузки ( ) –300 [Н·м]
) –300 [Н·м] -
Передаточное отношение механизма винт-гайка ( ) – 5.0 [мм/об]
) – 5.0 [мм/об] -
Вес перемещаемого органа ( )– 250 [кг]
)– 250 [кг]
Привести описание системы и ее функциональную схему, обоснование выбора элементов системы: датчиков, усилительных и преобразовательных устройств, АЦП, ЦАП; составить математическую модель системы с обоснованием, оценку влияния нелинейностей системы, периода квантования на качество регулирования, выбор ПЛК, принципиально-монтажную схему, блок-схему программы контроллера на языке лестничной логики.
-
Календарный план
| Наименование разделов курсовой работы | Срок выполнения разделов курсовой работы | Отметка о выполнении руководителя |
| Введение | | |
| Обзор литературы | | |
| Оформление пояснительной записки | | |
Руководитель проекта _________________ / В.В. Абдуллин /
Студент ________________ / А.В. Каштанова /
АННОТАЦИЯ
Каштанова А.В., Следящая система механизма продольной подачи станка с ЧПУ. Пояснительная записка к курсовому проекту по курсу «Технические средства автоматизации и управления». – Челябинск ЮУрГУ, 2021, 36 с, 37 ил., библиогр. список – 11 наим.
В данной работе рассматривается синтез электропривода следящей системы подачи резца станка с числовым программным управлением (ЧПУ). Проведена настройка регуляторов контуров электропривода и двигателя постоянного тока (ДПТ), тока якоря, скорости вращения выходного вала двигателя, положения резца.
Настройка двигателя осуществлялась по условию технического оптимума (ТО), подбор коэффициентов контуров тока, скорости, положения осуществляется исходя из метода Циглера-Никольса и исходя из метода затухающих колебаний.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ 7
1 ВЫБОР ЭЛЕМЕНТОВ СХЕМЫ 9
1.1 Электродвигатель 9
1.2 Редуктор 11
1.3 Электропривод 12
Основой подключения и регулирования скоростью и током двигателя выберем цифровой электропривод серии ЭПУ1М-7-2-4327-ХХ УХЛ4. Электропривод серии ЭПУ1М-7-2-4327-ХХ УХЛ4 состоит из тиристорного преобразователя, электродвигателя со встроенным тахогенератором, согласующего трансформатора серии ТС-25,0 380/208 УХЛ4 [5]. Электропривод включает в себя два замкнутых контура подчиненного регулирования: контур тока (РТ) и контур скорости (РС) [4]. 12
1.4 Датчик тока 12
1.5 Датчик скорости 12
1.6 Датчик положения 12
1.7 Регулятор тока 14
1.8 Регулятор скорости 14
1.9 Усилитель мощности 14
1.10 Регулятор положения 14
1.11 Последовательные интерфейсы 16
2 МАТЕМАТИЧЕСКИЕ МОДЕЛИ 17
2.1 Модель двигателя 17
2.2 Передаточная функция ТП 18
2.3 Модель датчика тока 19
2.4 Модель регулятора тока 19
2.5 Модель датчика скорости 19
2.6 Модель регулятора скорости 19
3 НАСТРОЙКА СИСТЕМЫ 20
3.1 Настройка контура тока 20
3.2 Настройка контура скорости 21
3.3 Настройка контура положения 22
4 СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ 25
4.1 Статические характеристики 25
5 МОДЕЛИРОВАНИЕ СИСТЕМЫ 28
5.1 Моделирование с учетом нелинейностей 28
ЗАКЛЮЧЕНИЕ 35
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 36
ВВЕДЕНИЕ
В современном мире автоматизация получила большое распространение. В нынешнем техническом прогрессе непрерывно усложняются технологии. И большинство машин оснащено электроприводами, следовательно, требования к электроприводам возрастает. Задача самого электропривода — это осуществление сложных перемещений рабочих органов механизма. Для перемещения этих органов возникает необходимость разгона, торможения электропривода и постоянство регулируемой величины.
Числовое программное управление (ЧПУ) – область техники, связанная с применением цифровых вычислительных устройств для управления производственными процессами.
Следящая система механизма продольной подачи станка с ЧПУ представляет собой систему управления положением, построенную по принципам подчиненного регулирования с питанием двигателя постоянного тока от тиристорного преобразователя.
Станки с ЧПУ (числовым программным управлением) – это автоматизированные станки, которые могут производить операции по заданной программе без непосредственного участия человека.
Следящая система механизма продольной подачи станка с ЧПУ представляет собой систему управления положением, построенную по принципам подчиненного регулирования с питанием двигателя постоянного тока от тиристорного преобразователя.
В станках с числовым программным управлением (ЧПУ) и роботах рабочий орган воспроизводит три основных типа движения: позиционирование, прямолинейное движение с постоянной скоростью и движение по криволинейной траектории. В режиме позиционирования рабочий орган должен выйти в определенную позицию, остановиться, после чего происходит очередная операция.
Функциональная схема следящей системы подачи станка с ЧПУ представлена на рисунке 1.
Рисунок 1 – Функциональная схема следящей системы подачи станка с ЧПУ
Следящая система построена по принципу подчиненного регулирования и содержит три контура: положения, скорости и тока. В общем случае выбор параметров регуляторов координат и настройка контуров производятся на технический оптимум. Силовая часть обычно реализуется с использованием сервоприводов на основе полупроводниковых управляемых реверсивных выпрямителях [1].
1 ВЫБОР ЭЛЕМЕНТОВ СХЕМЫ
1.1 Электродвигатель
В рамках задания к курсовому проекту был предложен электродвигатель серии ПН. Электродвигатели постоянного тока 2ПН предназначены для работы в широкорегулируемых электроприводах с диапазоном регулирования до 1:2000 (для станкостроения). Двигатели серии 2ПН выполняются со встроенным тахогенератором типа ТС-1М.
Для подбора нужного электродвигателя осуществим расчет нагрузки. Момент нагрузки состоит из статической, вращение с постоянной скоростью, и динамической составляющей, ускорение и торможение, момент сил преодоления сухого и вязкого трения, шарнирный момент.
Расчет произведен средствами MathCAD.
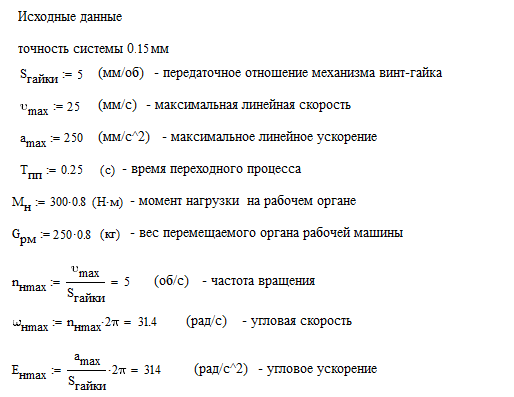
Рисунок 1.1 – Исходные данные и расчет в программном пакете MathCAD
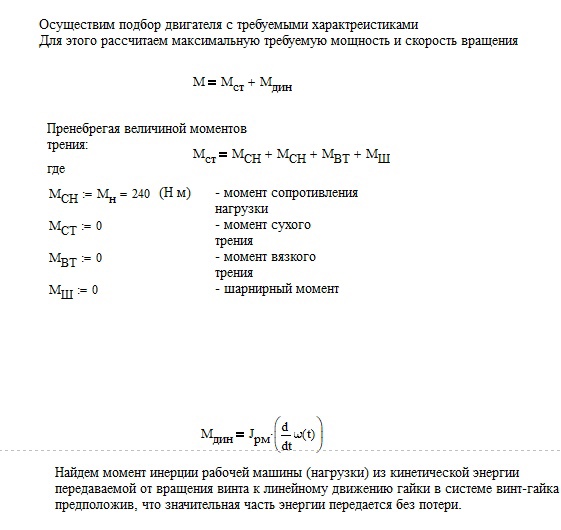
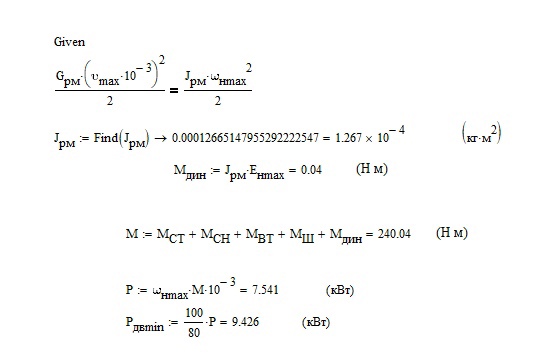
Рисунок 1.2 –Расчет требуемой мощности в программном пакете MathCAD
Тогда минимальная мощность, которую должен обеспечить двигатель, КПД которого >10 кВт равна 80%, равна:
 .
.Из серии ПН нам подходит двигатель 2ПН132МГУХЛ4 [2].
Таблица 1 – Характеристики двигателя 2ПН132МГУХЛ4
| Тип двигателя | Мощность, Вт | Напряжение, В | Ток якоря, А | Номинальная частота вращения, об/мин | КПД, % | Момент инерции, кг∙м2 |
| 2ПН132МГУХЛ4 | 10500 | 220 | 56.8 | 3000 | 84 | 0.038 |
1.2 Редуктор
Расчет коэффициента редуктора представлен на рисунке 1.3
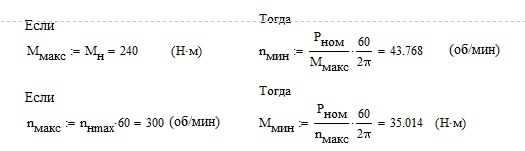
Рисунок 1.3 –Расчет коэффициента редуктора в программном пакете MathCAD
Рассчитаем передаточное отношение редуктора по формуле:
Для того чтобы обеспечить нужный момент силы на валу рабочего органа, нужен понижающий редуктор. Из-за КПД механической передачи редуктора, равным 0,8, необходимо взять передаточное отношение больше. Разделим U на КПД механической передачи редуктора и получим 8,56. Так как такого передаточного отношения нет, возьмем большее ближайшее к нему – 10. Таким передаточным отношением обладают одноступенчатые горизонтальные цилиндрические редукторы 1Ц2У.
Горизонтальные одноступенчатые цилиндрические редукторы 1Ц2У-100 представляют собой механизмы, предназначенные для уменьшения частоты вращения и увеличения крутящего момента. Редукторы 1Ц2У-100 имеют общемашиностроительное применение, могут применяться в условиях постоянной или переменной нагрузки при непрерывной работе или с остановками. Допустимо реверсивное направление. Валы способны вращаться в любую сторону. Редуктор серии 1Ц2У-100 обладает передаточным отношением от 1 до 8. Масса составляет 21 килограмм [3].
Таблица 2 – Характеристики редуктора 1Ц2У-100
| Передаточное число | КПД, % | Масса, кг | Номинальный крутящий момент, Н∙м |
| 10 | 96 | 21 | 315 |
1.3 Электропривод
Основой подключения и регулирования скоростью и током двигателя выберем цифровой электропривод серии ЭПУ1М-7-2-4327-ХХ УХЛ4. Электропривод серии ЭПУ1М-7-2-4327-ХХ УХЛ4 состоит из тиристорного преобразователя, электродвигателя со встроенным тахогенератором, согласующего трансформатора серии ТС-25,0 380/208 УХЛ4 [5]. Электропривод включает в себя два замкнутых контура подчиненного регулирования: контур тока (РТ) и контур скорости (РС) [4].
1.4 Датчик тока
Электропривод ЭПУ1М-7-2-4327-ХХ УХЛ4 имеет встроенный датчик тока с коэффициентом передачи 0.0235 В/А.
1.5 Датчик скорости
Двигатель 2ПН132МГУХЛ4 имеет встроенный тахогенератор ТС-1М [4]. Ниже приведены его характеристики.
Таблица 3 – Характеристики тахогенератора ТС-1М
| Крутизна выходной характеристики, В/(об/мин) | 0.033 | Нелинейность выходной характеристики, % | <2 |
| Сопротивление нагрузки, кОм | не менее 2 | Несимметрия вых. характеристики, % | <2 |
1.6 Датчик положения
В качестве датчика положения используем кодовый датчик – абсолютный оптический многооборотный энкодер GXM7S с интерфейсом RS-485 [5]. Датчик крепится на валу двигателя и позволяет с высокой точностью измерить угол поворота вала. Непосредственно измерение положения исполнительного механизма производится косвенно.
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Далее он переходит снова на ноль. Технические характеристики датчика GXM7S представлены в таблице 4 [6].
Таблица 4 – Характеристики датчика GXM7S
| Число разрядов | 12, бинарный код |
| Напряжение питания, В | 10 … 30 В |
| Напряжение выходных сигналов, В | 0…0,5 и 5…24 |
| Момент инерции, кг∙м2 | 2.3 ∙10-6 |
| Интерфейс | RS-485 |
Единица младшего разряда выходного кода датчика соответствует углу поворота вала, равному:
φ = 360˚/211 = 0.087˚.
Что соответствует смещению исполнительного механизма на расстояние равное:
Δx = (Sгайки / 360˚) ∙ φ = 0.0005 (мм).
Что на порядок меньше заданной точности в 0,15 мм.
1.7 Регулятор тока
Регулятор тока выполнен на ОУ А601 и представляет собой пропорционально интегральный регулятор. Схема ПИ-регулятора приведена на рисунке 1.4.
Рисунок 1.4 – Схема ПИ-регулятора
1.8 Регулятор скорости
Регулятор скорости совместно с регулятором тока и их корректирующими цепями обеспечивают необходимые показатели электропривода в статике и динамике.
1.9 Усилитель мощности
В качестве усилителя мощности сигнала управления с выхода регулятора тока на вход двигателя выступает встроенный в электропривод ЭПУ1М-7-2-4327-ХХ УХЛ4 тиристорный преобразователь (ТП) [4].
1.10 Регулятор положения
Контур положения – внешний контур следящей системы – осуществляется средством программируемого логического контроллера ОВЕН ПЛК160[М02] [7].
ОВЕН ПЛК160[М02] – линейка программируемых моноблочных контроллеров с дискретными и аналоговыми входами/выходами на борту для автоматизации средних систем. Оптимальны для построения систем автоматизации среднего уровня и распределенных систем управления.
ПЛК имеет в наличии порт для подключения интерфейса Ethernet, 3 последовательных порта, USB Device для программирования контроллера.
Таблица 5 – Входы и выходы ОВЕН ПЛК160[М02]
| Контроллер | ПЛК160[M02] |
| Дискретные входы | 16 |
| Дискретные выходы | 12 |
| Аналоговые входы | 8 |
| Аналоговые выходы | 4 |
Контроллер предназначен для:
− измерения аналоговых сигналов тока или напряжения и преобразования их к выбранной пользователем физической величине;
− измерения дискретных входных сигналов;
− управление дискретными (релейными) выходами;
− управление аналоговыми выходами;
− прием и передачу данных по интерфейсам RS-485, RS-232, Ethernet; − выполнение пользовательской программы по анализу результатов измерения дискретных и аналоговых входов, управления дискретными входами и выходами, передачи и приему данных по интерфейсам RS-485, RS-232, Ethernet.
Контроллер может применяться для создания систем автоматизированного управления технологическим оборудованием в энергетике, на транспорте, в различных областях промышленности, жилищно-коммунального и сельского хозяйства.
Логика работы контроллера определяется потребителем в процессе программирования контроллера. Программирование осуществляется с помощью программного обеспечения CoDeSys 2.3. Также поддерживаются все языки программирования, указанные в МЭК 61131- 3 [7].
1.11 Последовательные интерфейсы
Контроллер обеспечивает вывод значений измеряемых и заданных параметров технологического процесса на ПЭВМ.
Передача информации между контроллером и ПЭВМ может осуществляться по стандартным последовательным интерфейсам типа RS-232 или RS-485. Скорость передачи данных по последовательному интерфейсу задается при конфигурировании контроллера.
Микроконтроллер имеет 2 последовательных порта RS-485/RS-232.
Для подключения энкодера необходим соединитель PC10TB.
2 МАТЕМАТИЧЕСКИЕ МОДЕЛИ
2.1 Модель двигателя
Для того чтобы построить правильную математическую модель электродвигателя нужно определить его электрические и механические параметры.
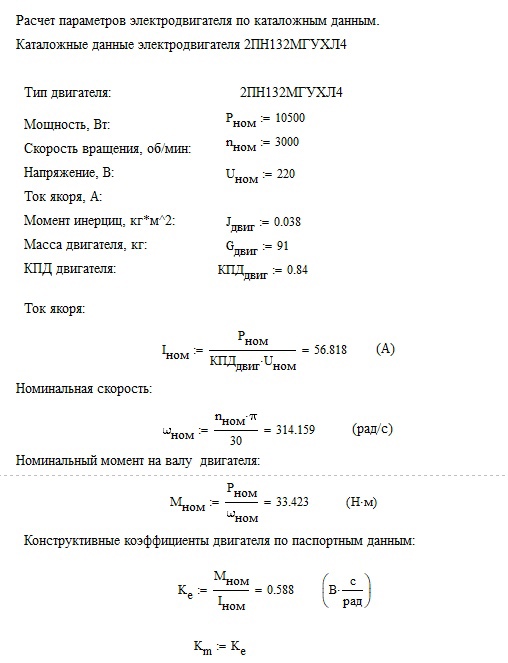
Рисунок 2.1 –Расчет требуемой мощности в программном пакете MathCAD
Находим сопротивление якоря, исходя из значений номинального напряжения питания, номинальной ЭДС и тока. Расчет сопротивления якоря представлен на рисунке 2.2.

Рисунок 2.2 – Расчет сопротивления якоря в программном пакете MathCAD
Находим индуктивность якоря. Схема возбуждения независимая, машина непомпенсированная, две пары полюсов ротора. Расчет представлен на рисунке 2.3.
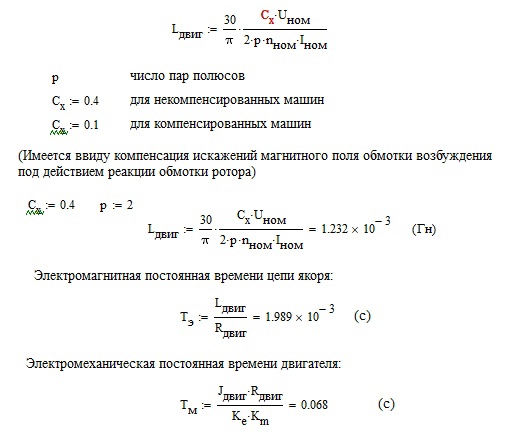
Рисунок 2.3 –Расчет характеристик двигателя в программном пакете MathCAD
 Рисунок 2.4 – Структурная схема ДПТ
Рисунок 2.4 – Структурная схема ДПТ2.2 Передаточная функция ТП
Тиристорный преобразователь в расчетах при моделировании изображается апериодическим звеном. Предельное время запаздывания определяется из числа пульсаций (m) выпрямленного напряжения за период преобразования и частоты питающего напряжения (f).
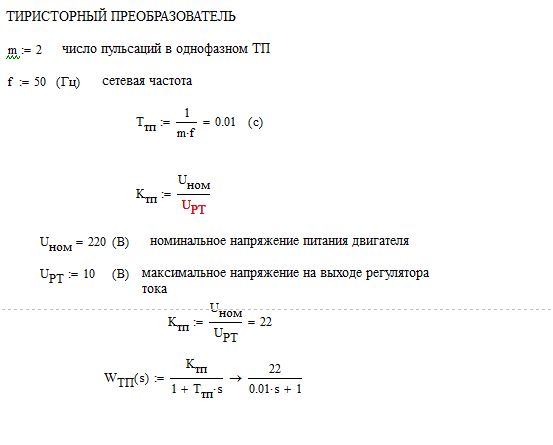
Рисунок 2.5 –Передаточная функция ТП в программном пакете MathCAD
2.3 Модель датчика тока
Электропривод ЭПУ1М-7 имеет в составе датчик тока с коэффициентом передачи 0.0235 (В/А) [4].
2.4 Модель регулятора тока
Регулятором тока выберем ПИ-регулятор, коэффициенты которого найдем позднее.
2.5 Модель датчика скорости
Двигатель 2ПН180МУХЛ4 имеет встроенный тахогенератор, рассмотренный в пункте 1.5. Коэффициент передачи датчика 0.03 [В/(об/мин)] или 0.286 [В/ (рад/с)] [2].
2.6 Модель регулятора скорости
Регулятором скорости выберем ПИ-регулятор.
3 НАСТРОЙКА СИСТЕМЫ
3.1 Настройка контура тока
Для настройки регулятора тока используем пропорциональный-интегральный регулятор, настройку для которого произведем по методу Циглера-Никольса [7,8].
Определим коэффициент передачи при котором на выходе устанавливаются незатухающие колебания с постоянной амплитудой колебаний. Данный коэффициент равен 12. На рисунке 3.1 можно увидеть переходную характеристику контура тока.
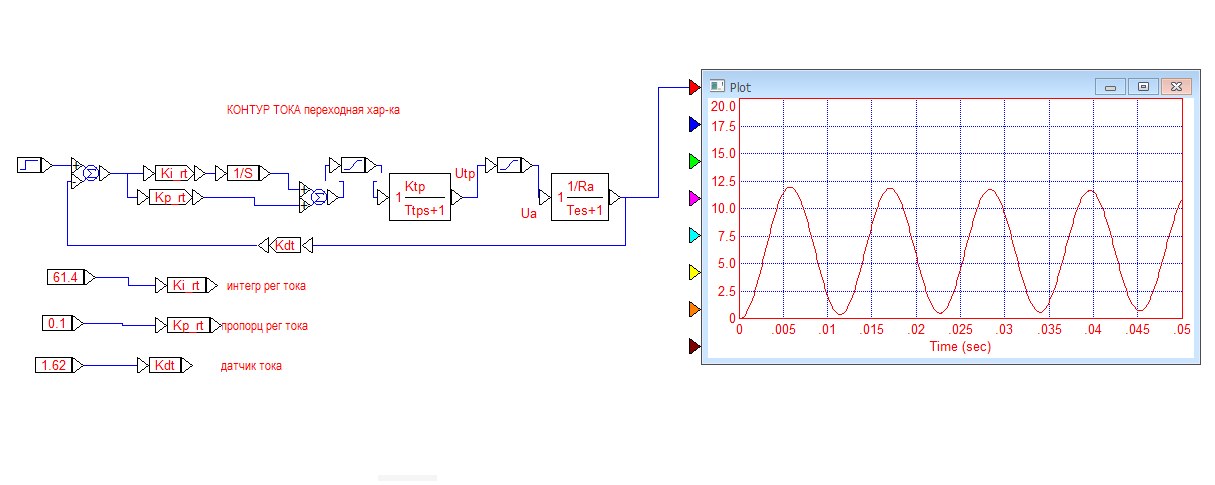
Рисунок 3.1 –Настройка контура тока в среде VisSim
В соответствии с методом Циглера-Никольса рассчитаем коэффициенты ПИ-регулятора. Получим следующие значения:

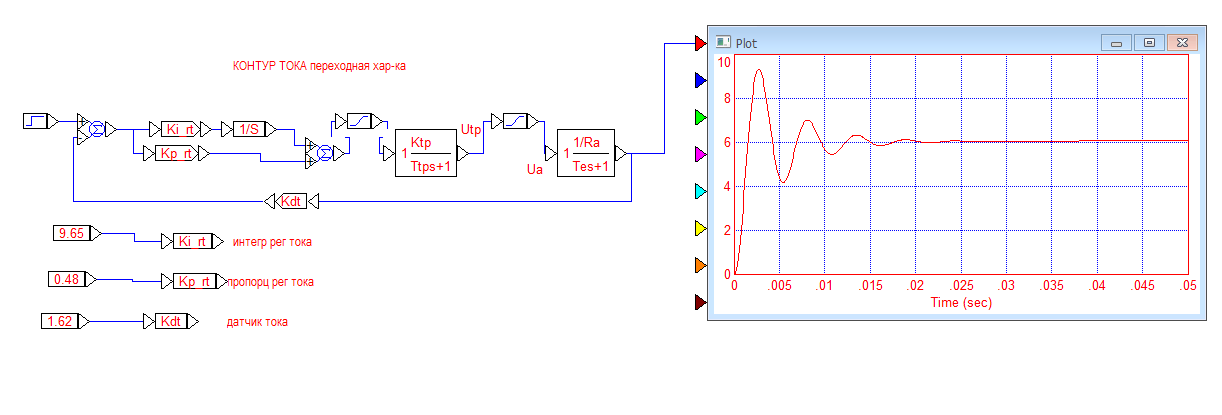
Рисунок 3.2 – Настройка контура тока в среде VisSim
Настройка коэффициентов регулятора тока по методу Циглера-Никольса не дала эффективных результатов, поэтому было решено скорректировать коэффициенты ПИ – регулятора «вручную». В результате получили ????Р=0.1, ????I=10. Перерегулирование равно 0%, время регулирования равно 0,05 с. Настройка контура тока представлена на рисунке 3.3.
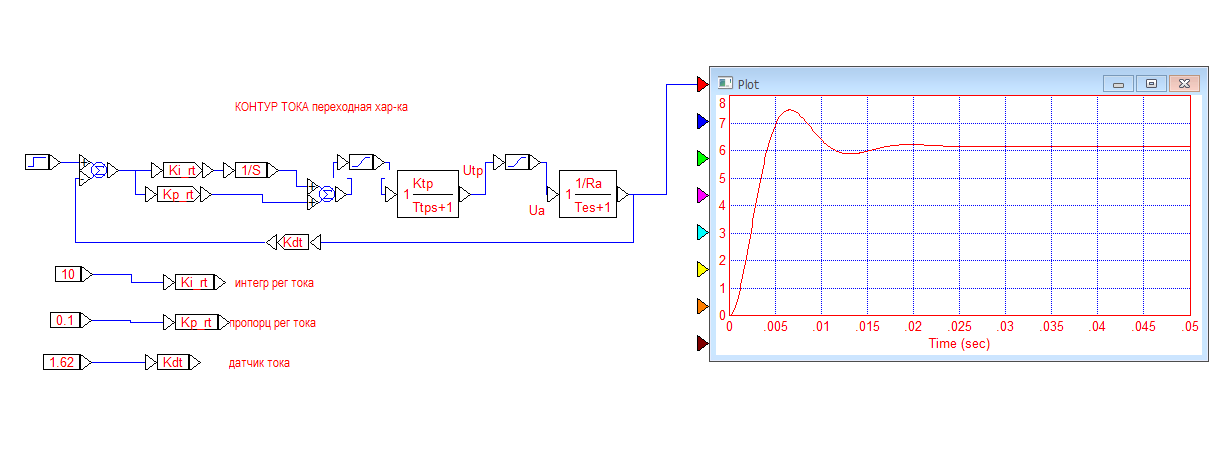
Рисунок 3.3 – Ручная настройка контура тока в среде VisSim
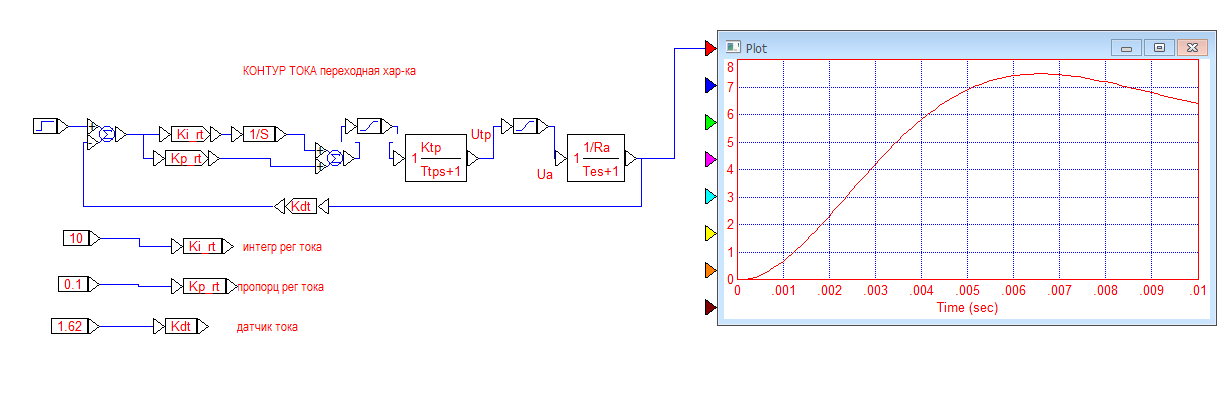
Рисунок 3.4 – Настройка контура тока с учетом нелинейности в среде VisSim
3.2 Настройка контура скорости
Для контура скорости используем пропорциональный-интегральный регулятор, настройку для которого произведем по методу Циглера-Никольса [8].
Определим коэффициент передачи при котором на выходе устанавливаются незатухающие колебания. Данный коэффициент равен 44.2.
На рисунке 3.5 можно увидеть переходную характеристику контура скорости.
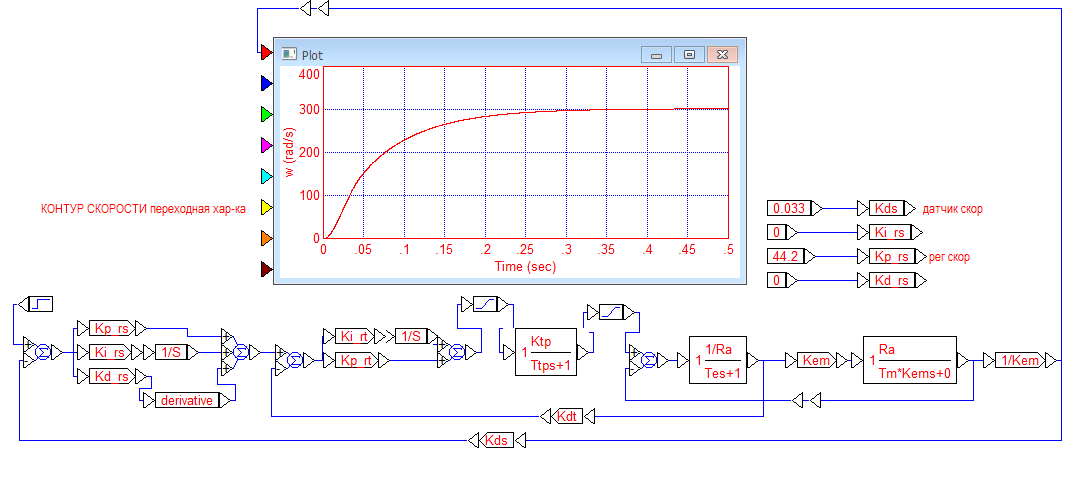
Рисунок 3.5 –Настройка контура скорости в среде VisSim
В соответствии с методом Циглера-Никольса рассчитаем коэффициенты ПИ-регулятора. Расчет и настройка контура скорости:




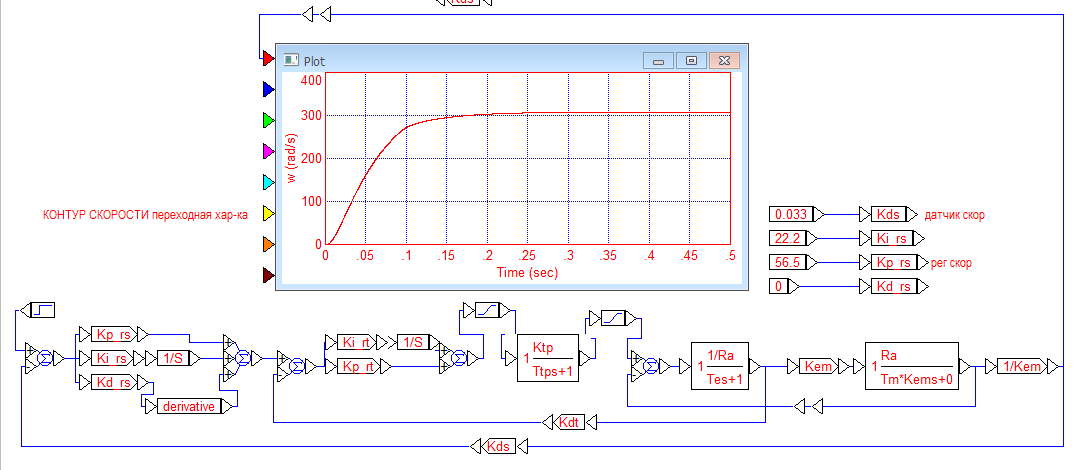
Рисунок 3.6 –Настройка контура скорости в среде VisSim
Настройка коэффициентов регулятора скорости по методу Зиглера-Никольса обеспечила необходимую эффективность.
3.3 Настройка контура положения
Для контура положения используем пропорциональный-дифференциальный регулятор, настройку для которого произведем по методу Циглера-Никольса [8].
Определим коэффициент передачи при котором на выходе устанавливаются незатухающие колебания с постоянной амплитудой колебаний. Данный коэффициент равен 12.4. На рисунке 3.7 можно увидеть переходную характеристику контура положения.
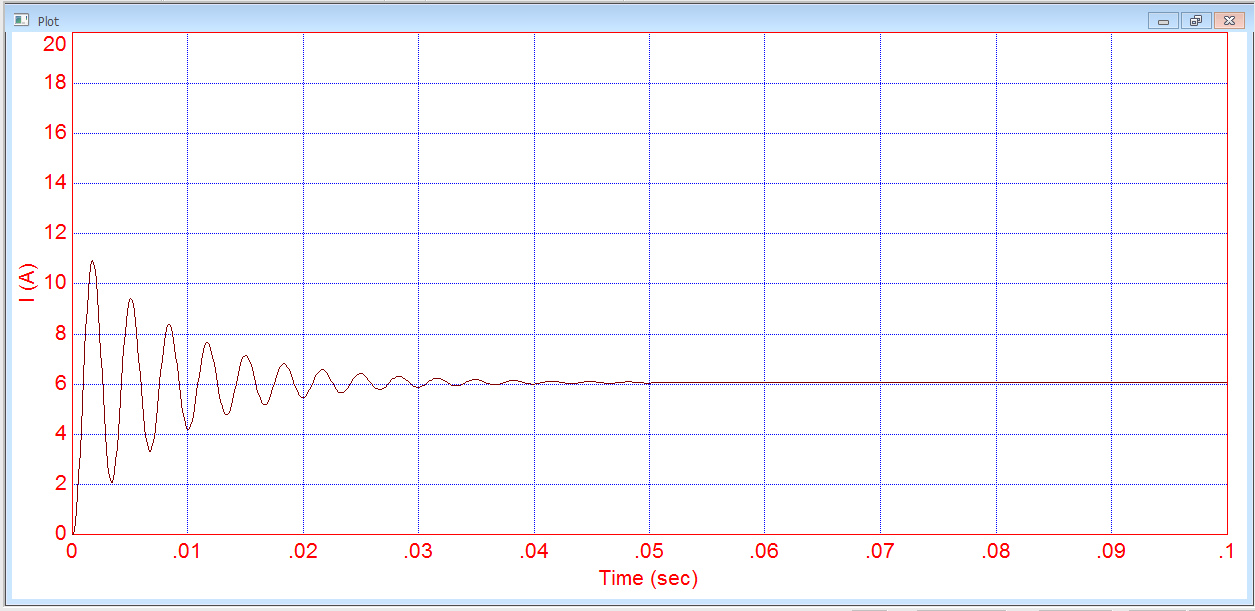
Рисунок 3.7 – Переходная характеристика контура положения
На рисунке 3.8 представлена схема контура положения.
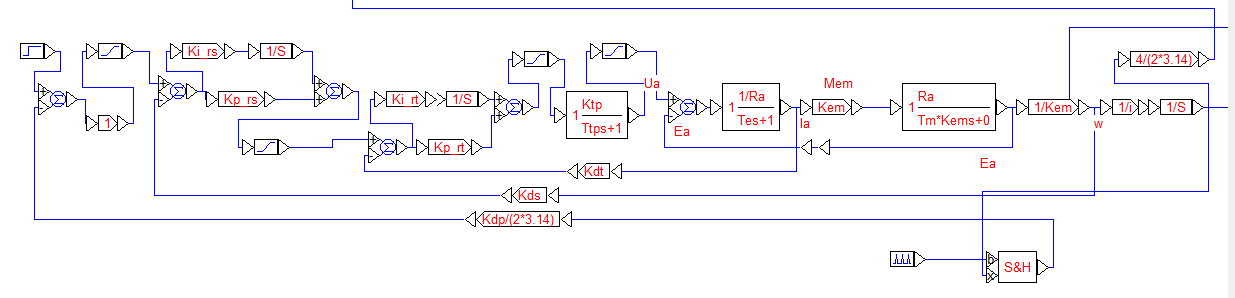
Рисунок 3.8 – Контур положения
В соответствии с методом Циглера-Никольса рассчитаем коэффициенты П-регулятора:

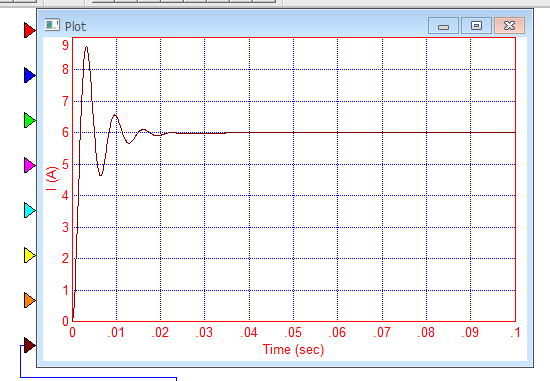
Рисунок 3.9 – Настройка контура положения в среде VisSim
Настройка коэффициента регулятора положения по методу Циглера-Никольса не дала эффективных результатов, поэтому было решено скорректировать коэффициент П – регулятора «вручную». В результате получили ????Р=0.1. Перерегулирование равно 0%, время регулирования равно 0.1с. Настройка контура тока представлена на рисунке 3.10.
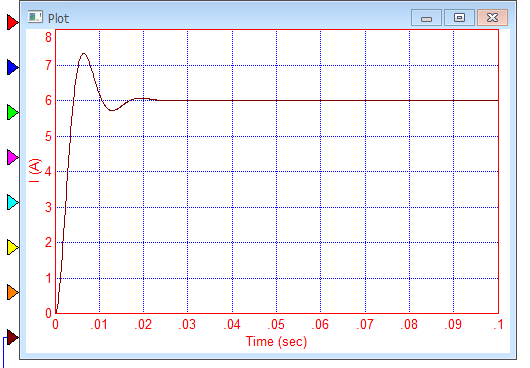
Рисунок 3.10 – Ручная настройка контура положения в среде VisSim
Таким образом система удовлетворяет условиям технического задания,
 < 0.25 с,
< 0.25 с,  < 15%.
< 15%.4 СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
4.1 Статические характеристики
Построим механические и регулировочные характеристики двигателя. Характеристики представлены на рисунках 4.1 и 4.2 соответственно.
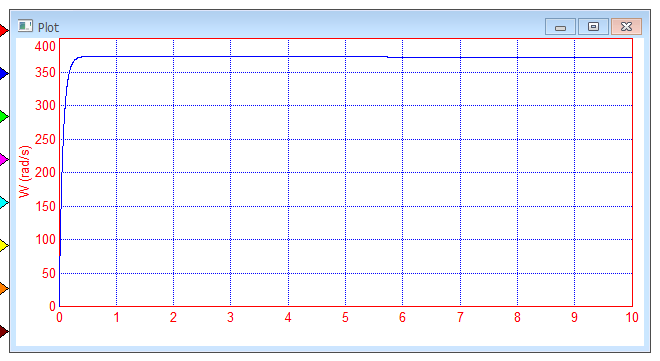
Рисунок 4.1 – Механическая характеристика двигателя
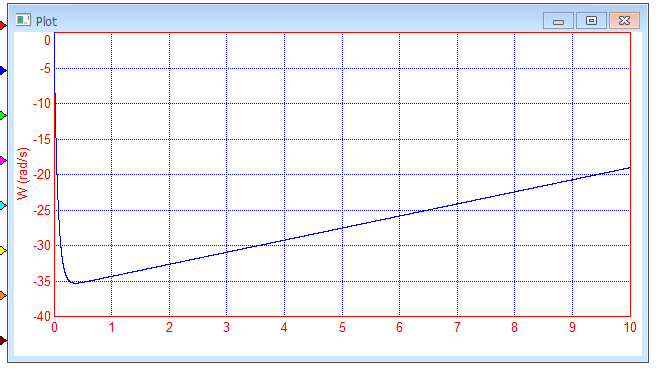
Рисунок 4.2 – Регулировочная характеристика двигателя
Построим статические характеристики контуров тока, скорости и положения. Для контура тока входным сигналом является выход регулятора скорости. Для контура скорости – регулятор положения. Для положения входом является сигнал уставки. Характеристики представлены на рисунках 4.3, 4.4, 4.5 соответственно.
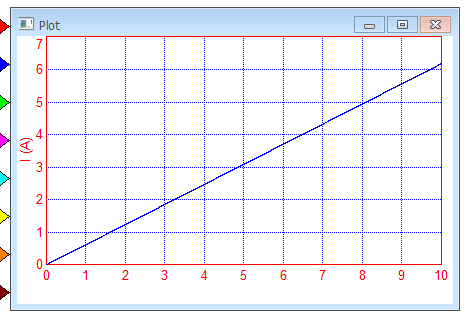
Рисунок 4.3 – Статическая характеристика контура тока
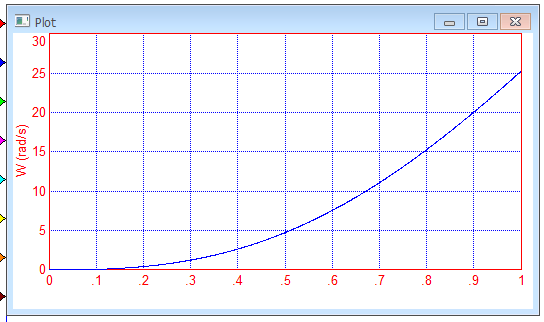
Рисунок 4.4 – Статическая характеристика контура скорости
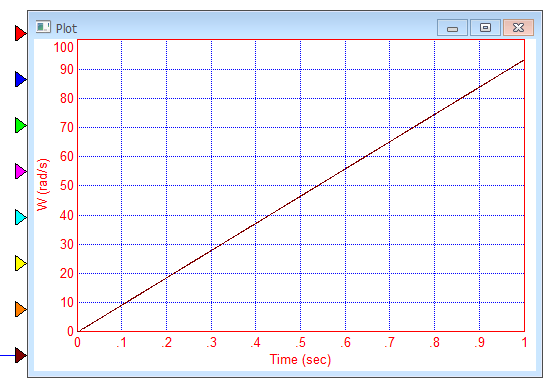
Рисунок 4.5 – Статическая характеристика контура положения
5 МОДЕЛИРОВАНИЕ СИСТЕМЫ
5.1 Моделирование с учетом нелинейностей
Выше построенные характеристики не отражают реальных условий работы элементов системы. Введем в нашу модель нелинейности:
1. Тиристорный преобразователь имеет ограничение по выдаваемому напряжению – введем нелинейность типа насыщение с ограничением 250 В
2. Регуляторы строятся на основе операционных усилителей, которые имеют ограничение по напряжению питания 10 В
3. Напряжение выхода контроллера ограничено 10В
4. Цифровой датчик положения производит измерения и АЦП/ЦАП контроллера производят преобразования дискретно с периодом 1 мс
5. Энкодер имеет предел чувствительности по величине младшего разряда, рассмотренный в пункте 1.6.
Произведем моделирование. Структурная схема представлена на рисунке 5.1, графики характеристик с нелинейностью представлены на рисунках 5.2-5.4.
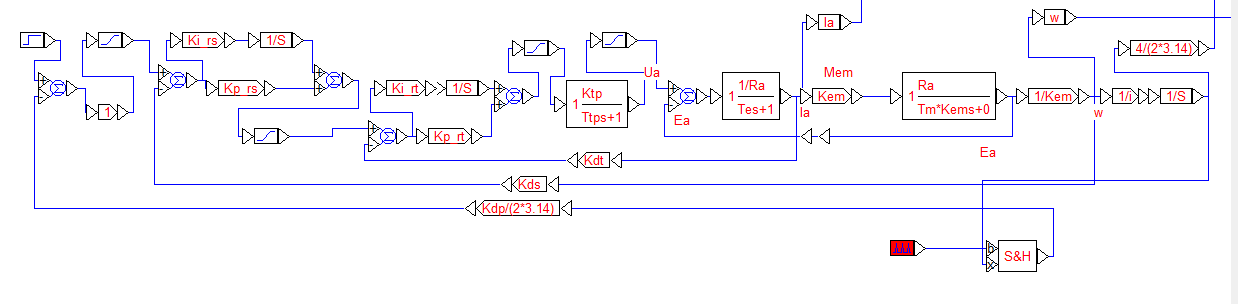
Рисунок 5.1 – Структурная схема с нелинейностями c среде VisSim
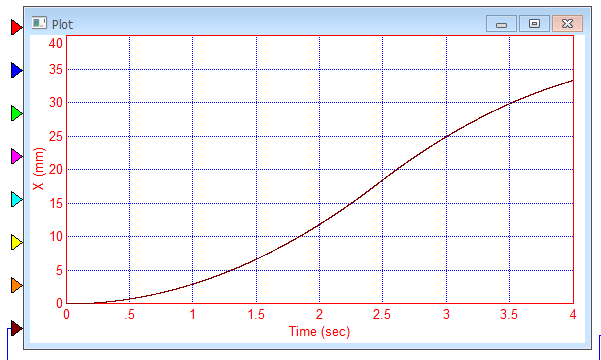
Рисунок 5.2 – Переходная характеристика контура положения
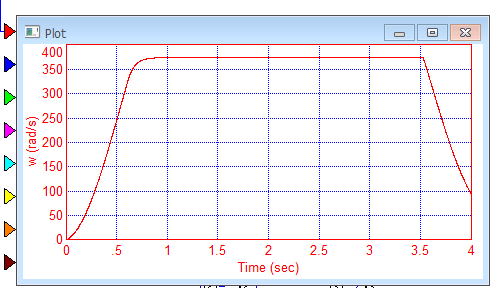
Рисунок 5.3 – Переходная характеристика контура тока
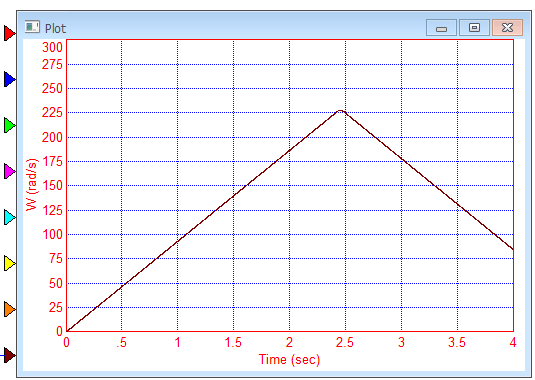
Рисунок 5.4 – Переходная характеристика контура скорости
-
Оценка влияния периода квантования на качество регулирования
Широкое распространение в промышленности получили линейные законы регулирования семейства ПИД-законов, которые реализуются П-, ПИ- или ПИД-регуляторами. Для реализации П-, ПИ- или ПИД-закона регулирования вычислительные операции могут выполняться как непрерывно, так и в дискретные моменты времени. В первом случае регулятор называют непрерывным, во втором – дискретным. В отличие от непрерывных, дискретные регуляторы обеспечивают изменение регулирующего воздействия только в определенные моменты времени. В случае, когда дискретный регулятор реализуют на базе цифровой ЭВМ (обычно на базе микро-ЭВМ), его называют цифрывым регулятором.
В процессе преобразования непрерывного сигнала в последовательность цифровых данных происходит двойное квантование информации: квантование по времени и квантование по уровню. Квантование по времени происходит вследствие того, что измерение происходит не непрерывно, а только в дискретные моменты времени.
Зададим шаг времени равный 0.008 и снимем выходные характеристики контуров. Результаты представлены на рисунках 5.5-5.7
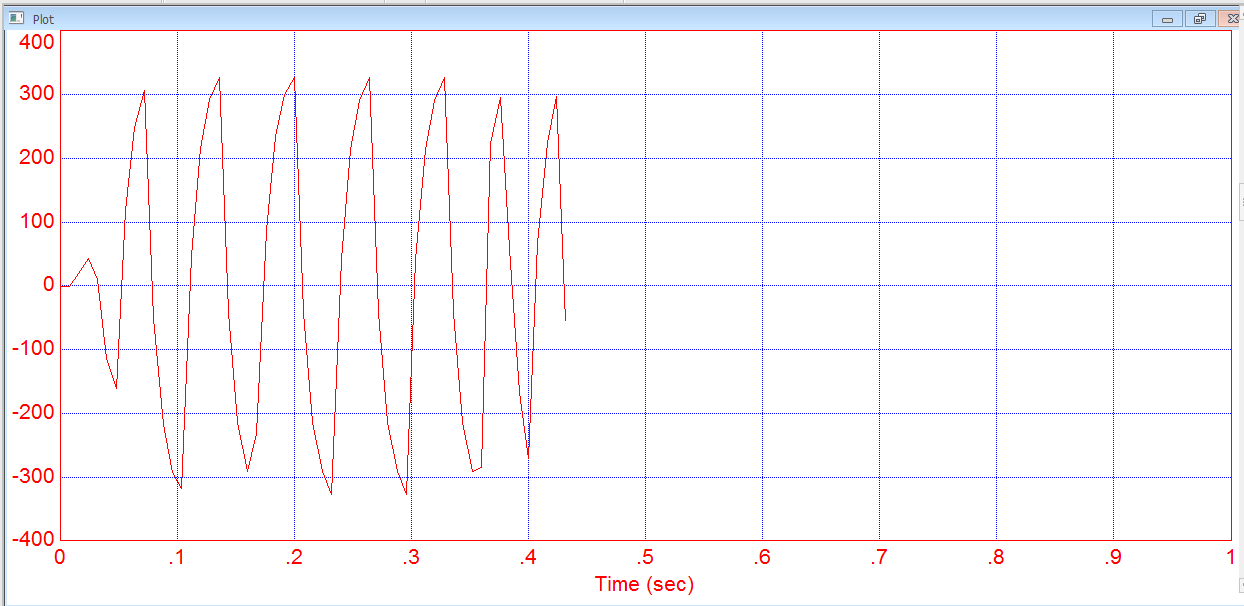
Рисунок 5.5 – Переходная характеристика контура тока
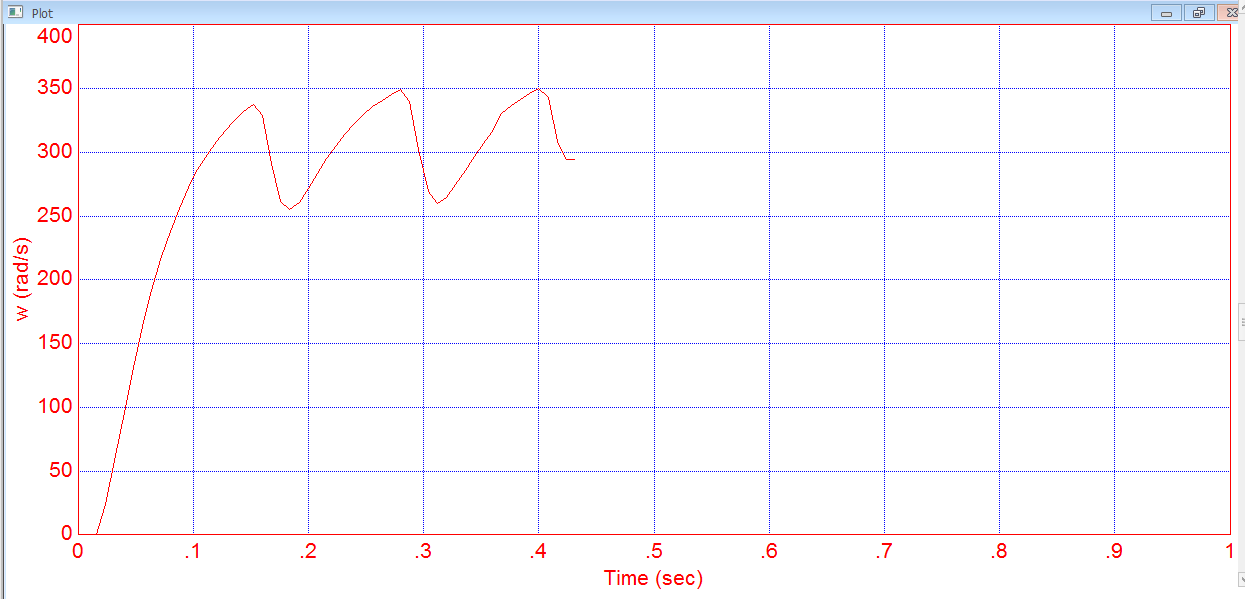
Рисунок 5.6 – Переходная характеристика контура скорости
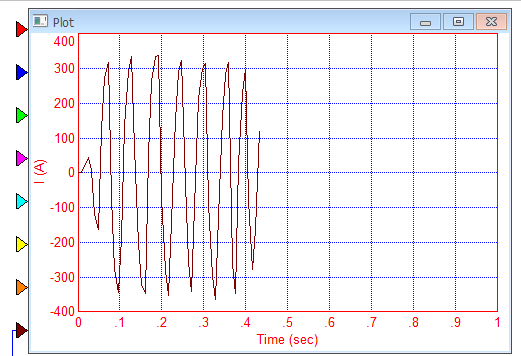
Рисунок 5.7 – Переходная характеристика контура положения
Исходя из графиков, представленных выше, можно сделать вывод о том, что необходимо уменьшить период квантования для получения более точной и качественной характеристики.
Зададим шаг времени равный 0.0005 и снимем выходные характеристики контуров. Результаты представлены на рисунках 5.8-5.10
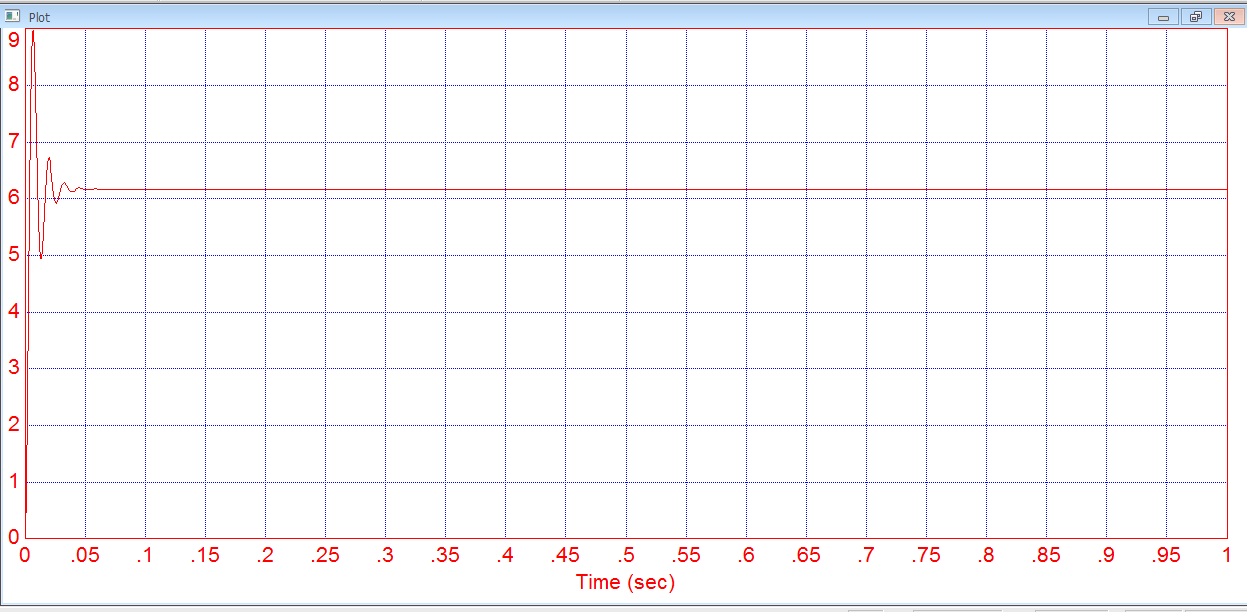
Рисунок 5.8 – Переходная характеристика контура тока
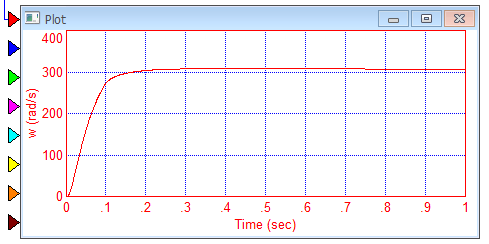
Рисунок 5.9 – Переходная характеристика контура скорости
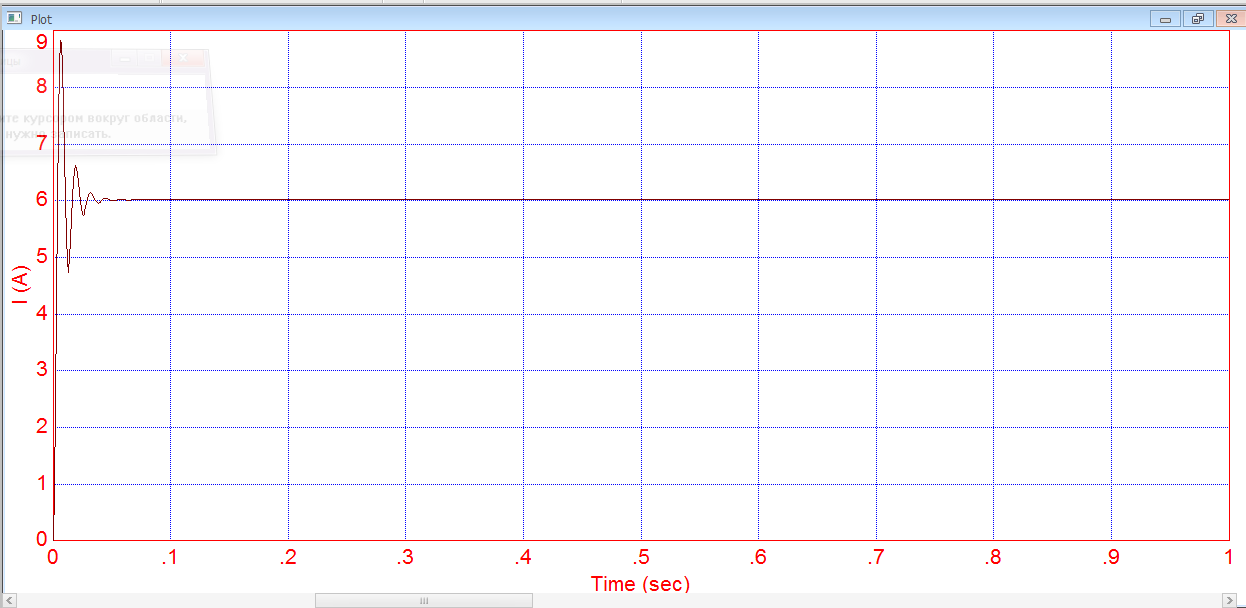
Рисунок 5.7 – Переходная характеристика контура положения
Из графиков видим, что переходные процессы стали более качественными, но все равно амплитуда значений слишком большая, а это значит, что система не находится в идеально возможном состоянии, что отразится на ее устойчивости. Поэтому зададим шаг времени равный 0.0001 и снимем выходные характеристики контуров. Результаты представлены на рисунках 5.11-5.13
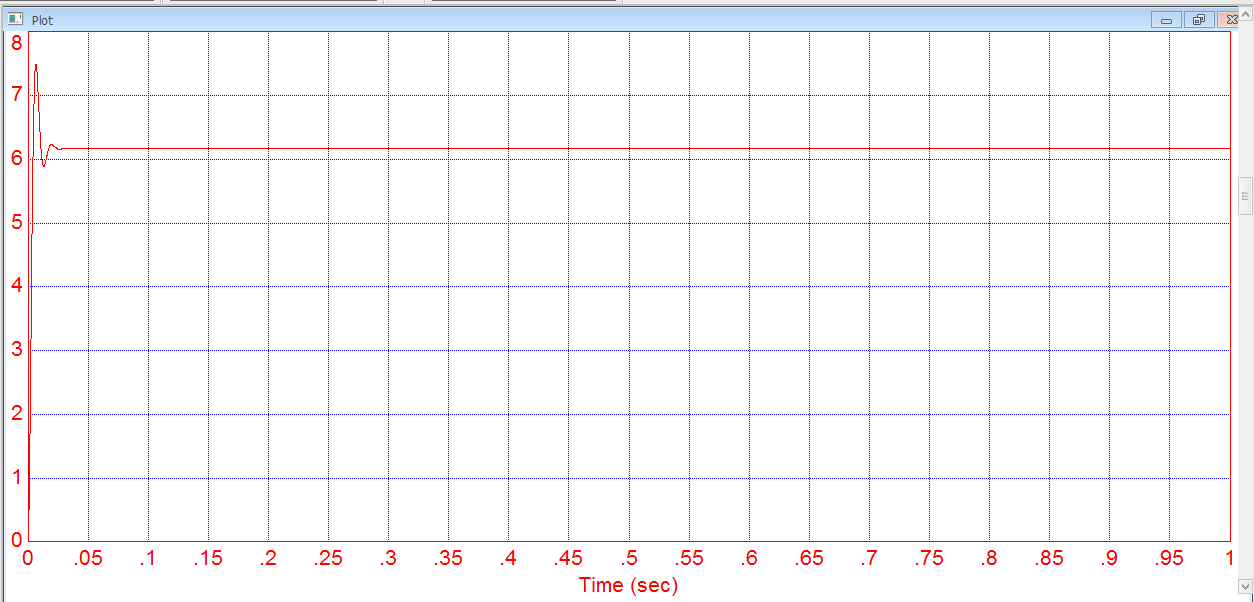
Рисунок 5.11 – Переходная характеристика контура тока
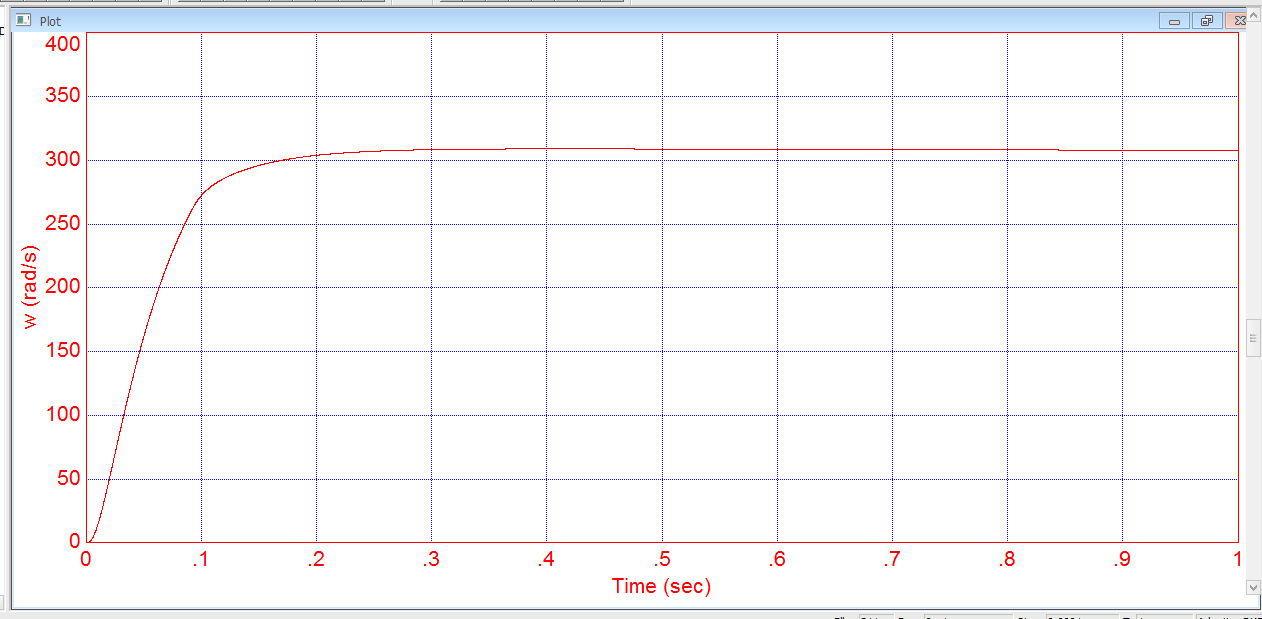
Рисунок 5.12 – Переходная характеристика контура скорости
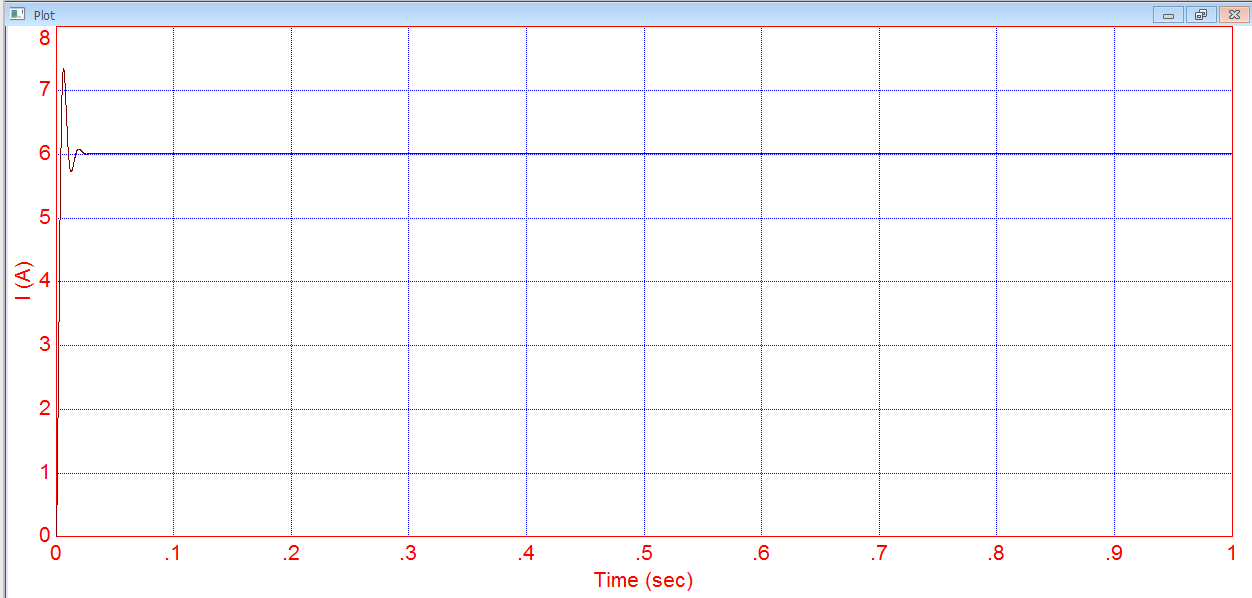
Рисунок 5.13 – Переходная характеристика контура положения
Таким образом, оптимально возможный шаг времени, при котором удовлетворяются заданные требования к точности цифрового процесса регулирования равен 0,0001, при этом частотные составляющие непрерывного сигнала не выходят из заданной полосы. Делаем вывод, что при слишком большом периоде квантования ухудшается качество регулирования.
ЗАКЛЮЧЕНИЕ
В ходе курсового проекта была выполнена работа по подбору элементов для системы управления. Также была проведена настройка регуляторов контуров электропривода: тока якоря, скорости вращения выходного вала двигателя, положения резца.
Настройка системы осуществлялась при использовании двух инженерных методов настройки регуляторов, метода Циглера-Никольса. Учтены нелинейности при моделировании и выведены статические характеристики каждого из контуров управления.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
-
Ямщиков А.В. / Элетромеханические системы / ч.2 основы теории управления двигателями постоянного тока / ЮУрГУ – 2015г. – 121 с. -
Электродвигатели постоянного тока серии 2П [Электронный ресурс]. – URL: https://elektro-dvigateli.ru/postoyannogo-toka/elektrodvigateli-2p-2pf-2pn-2pb.html -
Редуктор 1Ц2У-100 [Электронный ресурс]. – URL: https://www.reduktor-union.ru/reduktor.C2U.1C2U.100.html -
Преобразователь унифицированный трехфазный тиристорный серии ЭПУ1М-7 [Электронный ресурс]. – URL: http://www.elmotor.ru/pst2300.html -
Трансформаторы силовые трехфазные сухие типа ТС, ТСТ [Электронный ресурс]. – URL: http://www.elmotor.ru/tr1100.html -
Абсолютный угловой энкодер ЛИР-ДА158А.02 [Электронный ресурс]. – URL: https://skbis.ru/catalog/rotary/absolute-rotary-encoders/lir-da158a02 -
ПЛК160 [М02] контроллер для средних систем автоматизации с DI/DO/AI/AO (обновленный) [Электронный ресурс]. – URL: https://owen.ru/product/plk160 -
Методы настройки промышленных регуляторов [Электронный ресурс]. – URL: https://studopedia.ru/7_128993_metodi-nastroyki-promishlennih-regulyatorov.html -
ПИД-регулятор на FBD [Электронный ресурс]. – URL: http://mc-plc.ru/codesys/pid-regulyator-na-fbd.htm -
Руководство пользователя по программированию ПЛК в CoDeSys 2.3 [Электронный ресурс]. – URL: https://owen.ru/uploads/134/codesys_v23_ru.pdf -
Обозначение в электрических схемах [Электронный ресурс]. – URL: https://elektroshema.ru/2009-02-05-22-57-45/ugo-2/58-oboznbukv.html