Добавлен: 23.11.2023
Просмотров: 56
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
– передаточные коэффициенты.
В этом случае закон регулирования, называемый пропорционально-интегральным (ПИ-законом регулирования), будет описываться следующим уравнением:
 . (6)
. (6)
Введение интеграла в закон регулирования исключает статическую ошибку СУ, превращая ее в астатическую систему, но при этом одновременно уменьшаются запас устойчивости и быстродействие системы.
Благодаря наличию интегральной составляющей в алгоритме, ПИ-регулятор обеспечивает высокую точность в установившихся режимах, а при определенном соотношении коэффициентов ,
, обеспечивает хорошие показатели и в переходных режимах. Поэтому он получил наибольшее распространение в промышленной автоматике.
обеспечивает хорошие показатели и в переходных режимах. Поэтому он получил наибольшее распространение в промышленной автоматике.
Пропорционально-дифференциальный алгоритм регулирования (ПД-алгоритм)
Этот алгоритм реализуется при помощи пропорционального регулятора и введением в закон регулирования производной от сигнала рассогласования. Передаточная функция алгоритма:
 , (7)
, (7)
где – коэффициент дифференцирующего звена.
– коэффициент дифференцирующего звена.
Закон регулирования имеет вид:
 . (8)
. (8)
Регулятор, реализующий ПД-закон регулирования, реагирует не только на значение отклонения регулируемой величины в данный момент времени, но и на скорость изменения отклонения. Следовательно, регулятор работает с опережением, улучшая качество переходного процесса за счет учета тенденции последующего его развития, т. е. увеличивает быстродействие системы и запас устойчивости. Недостатком пропорционально – дифференциального закона регулирования является ограниченная точность. [6-10].
Пропорционально-интегрально-дифференциальный алгоритм регулирования (ПИД-алгоритм)
Этот алгоритм реализуется при помощи регулятора с передаточной функцией:
 (9)
(9)
где , , – постоянные коэффициенты.
, , – постоянные коэффициенты.
ПИД-закон регулирования, реализует алгоритм:
 . (10)
. (10)
Совместное введение производной и интеграла обеспечивает желаемое быстродействие, необходимый запас устойчивости и отсутствие статической ошибки СУ. ПИД-алгоритм – наиболее гибкий алгоритм регулирования (в классе линейных алгоритмов). Он сочетает в себе преимущества более простых выше рассмотренных алгоритмов Коэффициенты , , входящие в передаточные функции типовых регуляторов, подлежат настройке при наладке СУ и поэтому называются настроечными параметрами. Они имеют наименования: – коэффициенты пропорциональной, интегральной и дифференциальной частей СУ.
2 Моделирование СУ на ЭВМ
Моделирование СУ на ЭВМ базируется на цифровых моделях типовых динамических звеньев (ТДЗ). Основу цифрового моделирования представляет преобразование дифференциального уравнения (ДУ) в разностное. Одним из самых распространенных методов решения дифференциального уравнения является метод Эйлера.
2.1 Сущность метода Эйлера
ДУ представляется в форме Коши:
 , (11)
, (11)
где – искомая функция;
– искомая функция;  – задающее воздействие;
– задающее воздействие;  – независимая переменная (время).
– независимая переменная (время).
Сущность метода заключается в том, что если известно значение функции в какой-то (k-1)-й момент, то пользуясь рекуррентным соотношением, можно рассчитать значение функции в k-й момент (рисунок 5).
Рисунок 5 – Графическая интерпретация метода
Как видно из рисунка 5:
 (12)
(12)
Из (12) следует, что для нахождения при известном
при известном  , необходимо определить
, необходимо определить  . Как следует из решения треугольника АВС:
. Как следует из решения треугольника АВС:
 , (13)
, (13)
где – шаг решения;
– шаг решения;
 – угол наклона касательной к графику
– угол наклона касательной к графику  в точке
в точке  .
.
Из определения производной следует, что производная – это тангенс угла наклона касательной к графику функции:
 . (14)
. (14)
Как следует из (13,14) можно записать:
 . (15)
. (15)
Подставив (15) в (13) получим:
 . (16)
. (16)
Тогда уравнение Эйлера для решения ДУ в общем виде запишется следующим образом:
 . (17)
. (17)
В таблице 2 приведены цифровые модели (ЦМ) ТДЗ.
Таблица 2 – Цифровые модели ТДЗ
2.2 Компьютерная методика моделирования СУ
Цифровое моделирование включает в себя следующие этапы:
1. Определение ЦМ элементов, входящих в состав СУ.
2. Составление блок-схемы алгоритма ЦМ СУ.
3. Написание программы.
4. Отладка программы.
5. Исследование системы по ЦМ.
Согласно изложенной методике моделирования, используя таблицу 2, определим ЦМ элементов, входящих в систему:

Рисунок 6 – схема объекта управления
Таблица 3 – Цифровые модели ТДЗ входящие в схему
Таблица 3 – Продолжение
Эти элементы являются объектом управления, добавим к нему ПИ регулятор. Рисунок 6
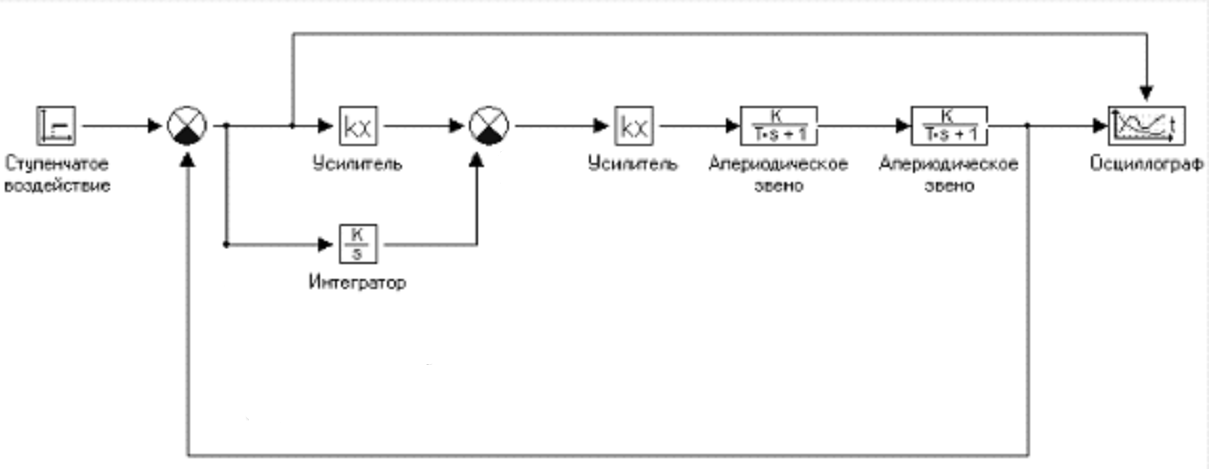
Рисунок 6 - Схема СУ с ПИ регулятором.
 ;
; 
Блок-схема алгоритма цифрового моделирования СУ представлена на рисунке 7.
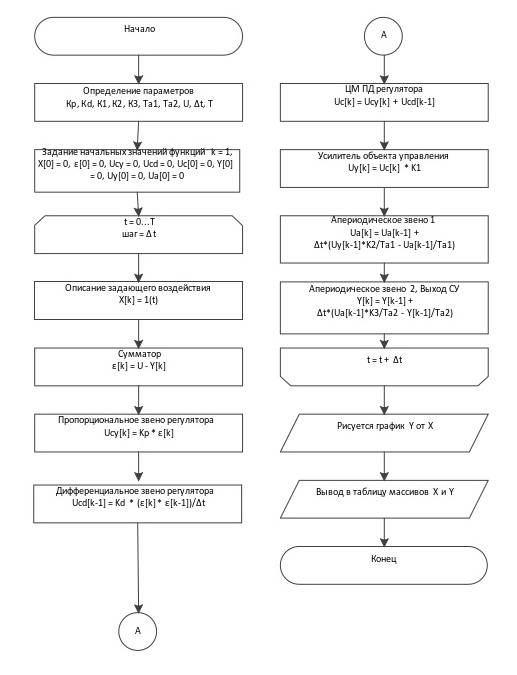
Рисунок 7 - Блок-схема алгоритма цифрового моделирования СУ с ПД регулятором
На рисунке 8 представлен интерфейс программы, позволяющий анализировать влияние параметров СУ на качество процесса управления с параметрами, заданными по варианту и подобранными значениями регулятора.
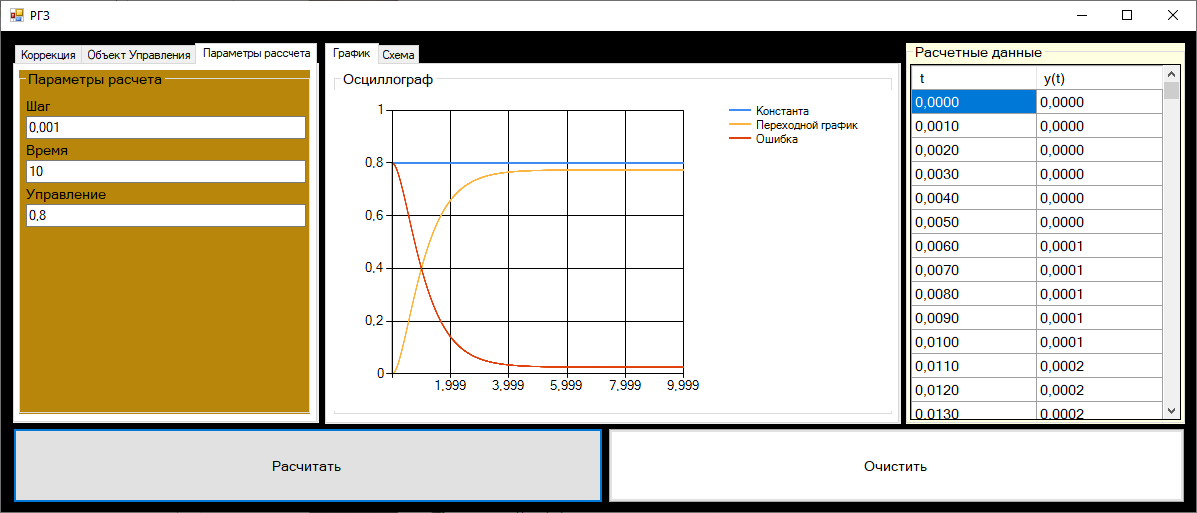
Рисунок 8-интерфейс программы анализа СУ.
На рисунке 9 представлен график, полученный в программном комплексе “МВТУ” с исходными параметрами и параметрами управления, в точности соответствующими установленным в программном средстве. Из графика можно сделать вывод, что результаты программного средства полностью соответствуют результатам “ПК МВТУ”. Время регулирования составляет секунд, что соответствует допустимому результату по варианту.
секунд, что соответствует допустимому результату по варианту.
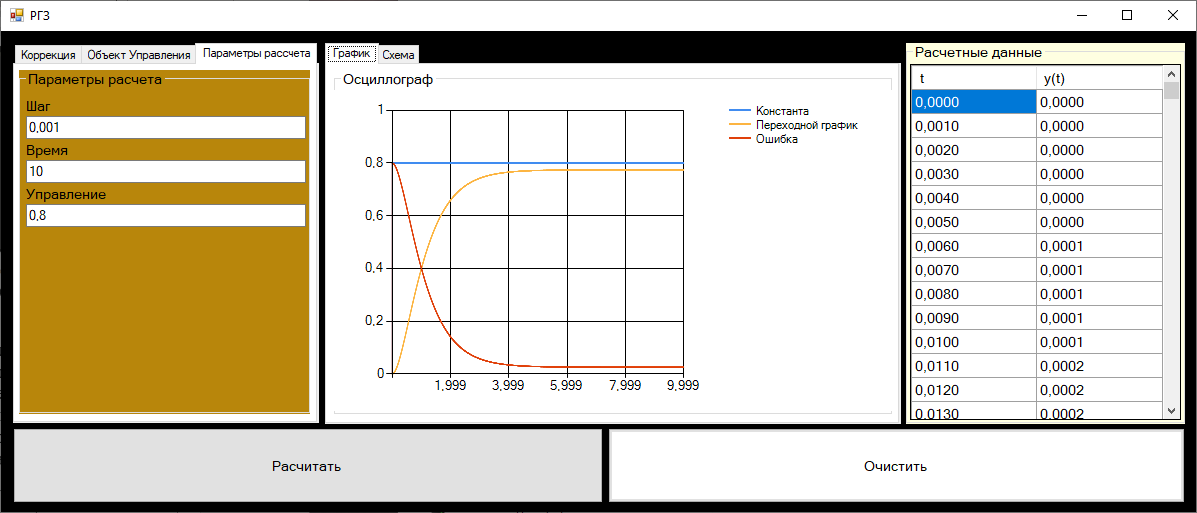
Рисунок 9 – график “ПК МВТУ”
Вывод
В ходе выполнения расчётно-графического задания были освоены отдельные понятия и вопросы теории управления (регуляторы, корректирующие элементы, структурно-неустойчивые системы, жесткие и гибкие обратные связи в качестве корректирующих элементов, введение в закон регулирования производных и интегралов, применение астатических звеньев в качестве корректирующих элементов; оптимальный переходный процесс; критерий оптимальности; интегральные методы оценки качества систем).
Получены практические навыки программной реализации алгоритмов управления в том числе навыки работы с регуляторами.
В ходе экспериментальных исследований можно сформулировать следующие выводы влияния настроечных параметров на показатели качества регулирования:
1.Увеличение коэффициента пропорциональной части регулятора приводит к увеличению перерегулирования
В этом случае закон регулирования, называемый пропорционально-интегральным (ПИ-законом регулирования), будет описываться следующим уравнением:
. (6)Введение интеграла в закон регулирования исключает статическую ошибку СУ, превращая ее в астатическую систему, но при этом одновременно уменьшаются запас устойчивости и быстродействие системы.
Благодаря наличию интегральной составляющей в алгоритме, ПИ-регулятор обеспечивает высокую точность в установившихся режимах, а при определенном соотношении коэффициентов
, обеспечивает хорошие показатели и в переходных режимах. Поэтому он получил наибольшее распространение в промышленной автоматике.Пропорционально-дифференциальный алгоритм регулирования (ПД-алгоритм)
Этот алгоритм реализуется при помощи пропорционального регулятора и введением в закон регулирования производной от сигнала рассогласования. Передаточная функция алгоритма:
, (7)где
– коэффициент дифференцирующего звена.Закон регулирования имеет вид:
. (8)Регулятор, реализующий ПД-закон регулирования, реагирует не только на значение отклонения регулируемой величины в данный момент времени, но и на скорость изменения отклонения. Следовательно, регулятор работает с опережением, улучшая качество переходного процесса за счет учета тенденции последующего его развития, т. е. увеличивает быстродействие системы и запас устойчивости. Недостатком пропорционально – дифференциального закона регулирования является ограниченная точность. [6-10].
Пропорционально-интегрально-дифференциальный алгоритм регулирования (ПИД-алгоритм)
Этот алгоритм реализуется при помощи регулятора с передаточной функцией:
(9)где
, , – постоянные коэффициенты.ПИД-закон регулирования, реализует алгоритм:
. (10)Совместное введение производной и интеграла обеспечивает желаемое быстродействие, необходимый запас устойчивости и отсутствие статической ошибки СУ. ПИД-алгоритм – наиболее гибкий алгоритм регулирования (в классе линейных алгоритмов). Он сочетает в себе преимущества более простых выше рассмотренных алгоритмов Коэффициенты
, , входящие в передаточные функции типовых регуляторов, подлежат настройке при наладке СУ и поэтому называются настроечными параметрами. Они имеют наименования: – коэффициенты пропорциональной, интегральной и дифференциальной частей СУ.2 Моделирование СУ на ЭВМ
Моделирование СУ на ЭВМ базируется на цифровых моделях типовых динамических звеньев (ТДЗ). Основу цифрового моделирования представляет преобразование дифференциального уравнения (ДУ) в разностное. Одним из самых распространенных методов решения дифференциального уравнения является метод Эйлера.
2.1 Сущность метода Эйлера
ДУ представляется в форме Коши:
, (11)где
– искомая функция; – задающее воздействие; – независимая переменная (время). Сущность метода заключается в том, что если известно значение функции в какой-то (k-1)-й момент, то пользуясь рекуррентным соотношением, можно рассчитать значение функции в k-й момент (рисунок 5).
Рисунок 5 – Графическая интерпретация метода
Как видно из рисунка 5:
Из (12) следует, что для нахождения
при известном , необходимо определить . Как следует из решения треугольника АВС: , (13)где
– шаг решения; – угол наклона касательной к графику в точке .Из определения производной следует, что производная – это тангенс угла наклона касательной к графику функции:
. (14)Как следует из (13,14) можно записать:
. (15)Подставив (15) в (13) получим:
. (16)Тогда уравнение Эйлера для решения ДУ в общем виде запишется следующим образом:
. (17)В таблице 2 приведены цифровые модели (ЦМ) ТДЗ.
Таблица 2 – Цифровые модели ТДЗ
| Операторный коэффициент передачи звена | Дифференциальное уравнение | Цифровая модель | ||
| Дифференцирующее звено  - - |  |  | ||
| Интегрирующее звено  |  |  | ||
| Апериодическое звено  |  |  | ||
| Форсирующее звено  |  |  | ||
| Колебательное звено  |  |   | ||
2.2 Компьютерная методика моделирования СУ
Цифровое моделирование включает в себя следующие этапы:
1. Определение ЦМ элементов, входящих в состав СУ.
2. Составление блок-схемы алгоритма ЦМ СУ.
3. Написание программы.
4. Отладка программы.
5. Исследование системы по ЦМ.
Согласно изложенной методике моделирования, используя таблицу 2, определим ЦМ элементов, входящих в систему:
Рисунок 6 – схема объекта управления
Таблица 3 – Цифровые модели ТДЗ входящие в схему
| Элемент | ЦМ |
 |  |
Таблица 3 – Продолжение
 |  |
 |  |
| | |
Эти элементы являются объектом управления, добавим к нему ПИ регулятор. Рисунок 6
Рисунок 6 - Схема СУ с ПИ регулятором.
| Контроллер | |  |  |
| П |  | – | – |
| ПИ |  |  | – |
| ПИД |  |  |  |
; Блок-схема алгоритма цифрового моделирования СУ представлена на рисунке 7.
Рисунок 7 - Блок-схема алгоритма цифрового моделирования СУ с ПД регулятором
На рисунке 8 представлен интерфейс программы, позволяющий анализировать влияние параметров СУ на качество процесса управления с параметрами, заданными по варианту и подобранными значениями регулятора.
Рисунок 8-интерфейс программы анализа СУ.
На рисунке 9 представлен график, полученный в программном комплексе “МВТУ” с исходными параметрами и параметрами управления, в точности соответствующими установленным в программном средстве. Из графика можно сделать вывод, что результаты программного средства полностью соответствуют результатам “ПК МВТУ”. Время регулирования составляет
секунд, что соответствует допустимому результату по варианту. Рисунок 9 – график “ПК МВТУ”
Вывод
В ходе выполнения расчётно-графического задания были освоены отдельные понятия и вопросы теории управления (регуляторы, корректирующие элементы, структурно-неустойчивые системы, жесткие и гибкие обратные связи в качестве корректирующих элементов, введение в закон регулирования производных и интегралов, применение астатических звеньев в качестве корректирующих элементов; оптимальный переходный процесс; критерий оптимальности; интегральные методы оценки качества систем).
Получены практические навыки программной реализации алгоритмов управления в том числе навыки работы с регуляторами.
В ходе экспериментальных исследований можно сформулировать следующие выводы влияния настроечных параметров на показатели качества регулирования:
1.Увеличение коэффициента
пропорциональной части регулятора приводит к увеличению перерегулирования