Файл: Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 64
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Минобрнауки России
Юго-Западный государственный университет
Кафедра механики, мехатроники и робототехники
КУРСОВАЯ РАБОТА
по дисциплине «Моделирование и исследование мехатронных систем и роботов»
на тему «Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы»
Направление подготовки 15.04.06 Мехатроника и робототехника
| Автор работы | | | Чиетчуа Такам К. И. | | | |
| | | | (инициалы, фамилия) | | (подпись, дата) | |
Группа МТ-21м
| Руководитель работы | | Б.В. Лушников | | |
| | | (инициалы, фамилия) | | (подпись, дата) |
| Работа защищена | |
| | (дата) |
| Оценка | |
| Члены комиссии | | | С.Ф. Яцун |
| | (подпись, дата) | | (инициалы, фамилия) |
| | | | Б.В. Лушников |
| | (подпись, дата) | | (инициалы, фамилия) |
| | | | Е.Н. Политов |
| | (подпись, дата) | | (инициалы, фамилия) |
Курск 2023 г.
РЕФЕРАТ
Курсовая работа по дисциплине «Моделирование и исследование мехатронных систем и роботов» на тему «Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы»: содержит 27 страниц, 14 рисунков, 6 источников литературы.
Ключевые слова: Траектория, обратная кинематика, прямая кинематика, обратная динамика, прямая динамика, 5 степеней свободы, MATLAB/SimScape Multibody, SolidWorks, манипулятор, рабочая область.
Целью курсовой работы является разработка системы управления суставами манипулятора по вполне заданной траектории с использованием инверсной кинематики руки манипулятора, расчет моментов сил на уровне суставов с использованием инверсной динамики и 3D моделирование робота.
Чтобы соответствовать спецификациям этой курсовой работы, траектория конечного эффектора была установлена априори, которая состоит из траектории логарифмической спирали. Затем мы продолжили изучение прямого и обратного кинематического анализа. Что касается инверсной кинематики, то она решалась путем реализации алгоритма, основанного на алгебраическом методе. Прямая кинематика, с другой стороны, была рассчитана для проверки, чтобы убедиться, что конечный орган принимает желаемое положение, путем точной замены тех, которые являются значениями полученных углов, для суставных переменных, обратными кинематика. Была кратко объяснена прямая динамика, а что касается обратной динамики, то она была разработана с помощью кодов, которые позволяют нам точно найти пару сил на каждом суставе робота при каждом положении рабочего органа. Проект был разработан в программной среде Matlab/Simulink с помощью набора инструментов Simscape/Multibody для части моделирования и программного обеспечения SolidWorks для 3D-моделирования.
Содержание
Введение................................................................................................................. 4
1. Описание робота................................................................................................ 5
1.1 Геометрические характеристики робота-манипулятора......................... 5
1.2 Системы отсчета.......................................................................................... 5
1.3 Матрицы трансформации........................................................................... 6
2. Кинематический анализ.................................................................................... 8
2.1 Планирование траектории.......................................................................... 8
2.2 Прямая кинематика..................................................................................... 9
2.3 Обратная кинематика.................................................................................. 10
3. Модель Simscape MultiBody............................................................................. 12
4. Анализы и результаты....................................................................................... 13
4.1 Выделение данных...................................................................................... 14
4.2 Проверка и результаты............................................................................... 14
5. Динамический анализ........................................................................................ 15
5.1 Метод Лагранжа-Эйлера............................................................................ 16
5.2 Обратная динамика..................................................................................... 17
5.3 Формулировка обратной динамики в MatLab.......................................... 19
5.4 Прямая динамика........................................................................................ 22
6. Рабочее пространство........................................................................................ 23
7. 3D-моделирование робота-манипулятора....................................................... 24
Заключение ............................................................................................................ 25
Приложение............................................................................................................ 26
Список используемой литературы ...................................................................... 27
Введение
Целью курсовой работы является разработка системы управления суставами манипулятора по вполне заданной траектории с использованием инверсной кинематики руки манипулятора, расчет моментов сил на уровне суставов с использованием инверсной динамики и 3D моделирование робота.
Робот — это искусственная машина, выполняющая определенные действия на основе данных ей команд и своей стартовой конфигурации. Как правило, эти задачи должны выполняться для того, чтобы заменить людей или помочь им в таких видах деятельности, как производство, строительство, работа с тяжелыми или опасными материалами, или в условиях, которые недопустимы или несовместимы с условиями жизни человека.
Механическая структура роботов состоит из последовательности механических элементов, соединенных друг с другом шарнирами, которые позволяют им двигаться. Соединения классифицируются как вращательные или призматические, в зависимости от типа относительного движения, которое они допускают, соответственно вращательное и поступательное.
Физическую структуру робота обычно можно описать следующим образом: основание, фиксированное или подвижное, соединенное с конечным рабочим органом через звенья, или твердые тела, соединенные между собой шарнирами, которые обеспечивают движение всей конструкции. Твердое тело в пространстве имеет, если оно не связано с ограничениями, шесть степеней свободы, три из которых связаны с возможностью перемещения в трех пространственных измерениях, а остальные три с возможностью вращения вокруг трех осей ортонормированной триады, заодно с твердым телом. Количество степеней свободы конструкции эквивалентно количеству свободных координат, связанных с исполнительными механизмами, и представляет собой минимальное количество независимых параметров, необходимых для описания всех возможных конфигураций системы при движении.
1. Описание робота
И
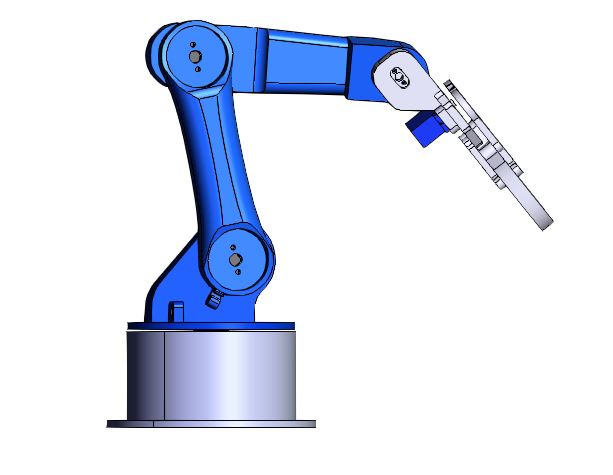
сследуемый робот представляет собой серийный манипулятор с пятью степенями свободы, то есть с пятью степенями свободы, все сочленения которого вращаются. Со структурной точки зрения его можно проследить до человеческой руки, поскольку разрешенные движения аналогичны движениям плеча, локтя и запястья.
Рис. 1. Реальная модель робота с 5 степенями свободы.
-
Геометрические характеристики робота-манипулятора
Твердые тела манипулятора приводятся в движение электрическими патрубками, эти твердые тела гетерогенны, состоят из алюминиевой части, а другая часть является пайщиком. В таблице ниже у нас есть геометрические характеристики его твердых тел.
| Твердые тела | Ширина | Длина | Высота | масса |
| S1 |  | 1 м | | 49.0874 кг |
| S2 | | 1 м | | 31.4159 кг |
| S3 | | 0.8 м | | 16.085 кг |
| S4 | | 0.4 м | | 12.5664 кг |
| S5 | | 0.5 м | | 0.005 кг |
Табл. 1. Геометрические характеристики тел
-
Системы отсчета
При назначении систем отсчета было решено принять соглашение Денавита-Хартенберга (D-H), которое позволяет представлять геометрическое преобразование в евклидовом пространстве с использованием четырех параметров, а именно:
• d: расстояние оси Zn-1 от общей нормали;
• θ: угол поворота вокруг оси Zn-1, необходимый для совмещения Xn-1 с Xn;
• a: минимальное расстояние между осями Zn-1 и Zn;
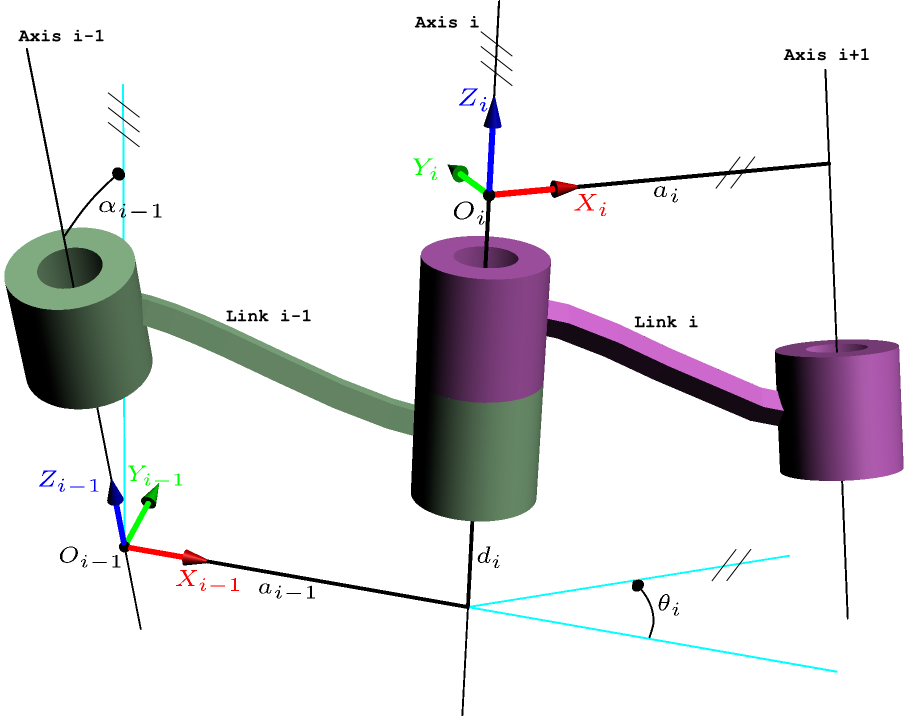 • α: угол поворота вокруг общей нормали Xn для выравнивания оси Zn-1 с осью Zn.
• α: угол поворота вокруг общей нормали Xn для выравнивания оси Zn-1 с осью Zn.Рис. 2. Параметры формулы Денавита-Хартенберга
Параметры, которые были выбраны для использования в конкретном случае, показаны в следующей таблице:
| Link i | αi | ai | di | θi |
| 1 | 0° | 0 | d1 | θ1 |
| 2 | 90° | 0 | 0 | θ2 |
| 3 | 0° | a3 | 0 | θ3 |
| 4 | 0° | a4 | 0 | θ4 – 90° |
| 5 | -90° | 0 | d5 | θ5 |
Табл. 2. Значения параметров D-H
-
Матрицы трансформации
Матрицы трансформации используются для описания положения и ориентации твердого тела в пространстве. Эти матрицы, каждая размером (4x4), состоят из: подматрицы R (3x3), определяющей ее вращение; вектор-столбец P размерности (3x1), определяющий его позицию; и вектор-строку размерности (1x4), который описывает его однородные координаты. Что касается последнего, каждый элемент примет значение, равное 0, если он будет представлять вектор, или 1, если он будет точкой.
(1)
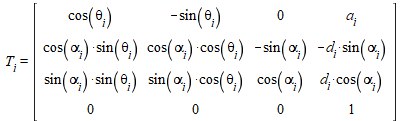 Таким образом, каждое звено робота может быть определено с помощью одной из этих матриц:
Таким образом, каждое звено робота может быть определено с помощью одной из этих матриц: