Файл: Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 67
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рис. 12. Настройка текстового файла
После запуска основного скрипта получаем координаты обобщенных сил (или моментов)
 :
: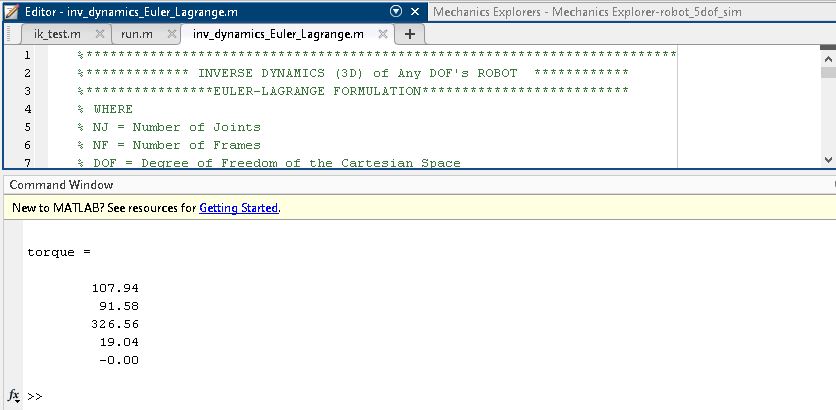
Рис. 13. Обобщенные силы или моменты в определенном положении
5.4 Прямая динамика
Нас интересует прямая динамика для имитации движения манипулятора, необходимого для получения максимально необходимого выходного крутящего момента привода. Зная крутящий момент, приложенный к приводам, мы можем найти угловое ускорение каждого привода. Затем это ускорение интегрируется по временному шагу для получения скоростей и положений.
Для решения прямой задачи динамики уравнение (38) примет следующий вид:
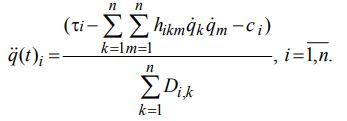
(43)
Значения обобщённой переменной и её производной вычисляются следующим образом:
 (44)
(44) (45)
(45)где
 – изменение времени.
– изменение времени.6. Рабочее пространство
Решение прямой задачи о положении позволяет определить положение и ориентацию в пространстве схвата манипулятора, удерживаемого им инструмента или транспортируемого объекта при условии, что известны значения обобщенных координат манипулятора
 ,
,  . Эти значения могут изменяться в определенных пределах, которые обусловлены конструкцией механизма, или их специально назначают из соображений безопасности работы манипулятора:
. Эти значения могут изменяться в определенных пределах, которые обусловлены конструкцией механизма, или их специально назначают из соображений безопасности работы манипулятора:
Совокупность этих условий определяет область Sq изменения обобщенных координат. Поскольку каждому сочетанию обобщенных координат соответствует некоторое положение схвата (объекта манипулирования), области Sq изменения обобщенных координат соответствует некоторая область Sr в пространстве рабочей сцены, в которой может находиться схват. Эту область называют рабочим пространством манипулятора (а также рабочей зоной, зоной достижимости).
Ч
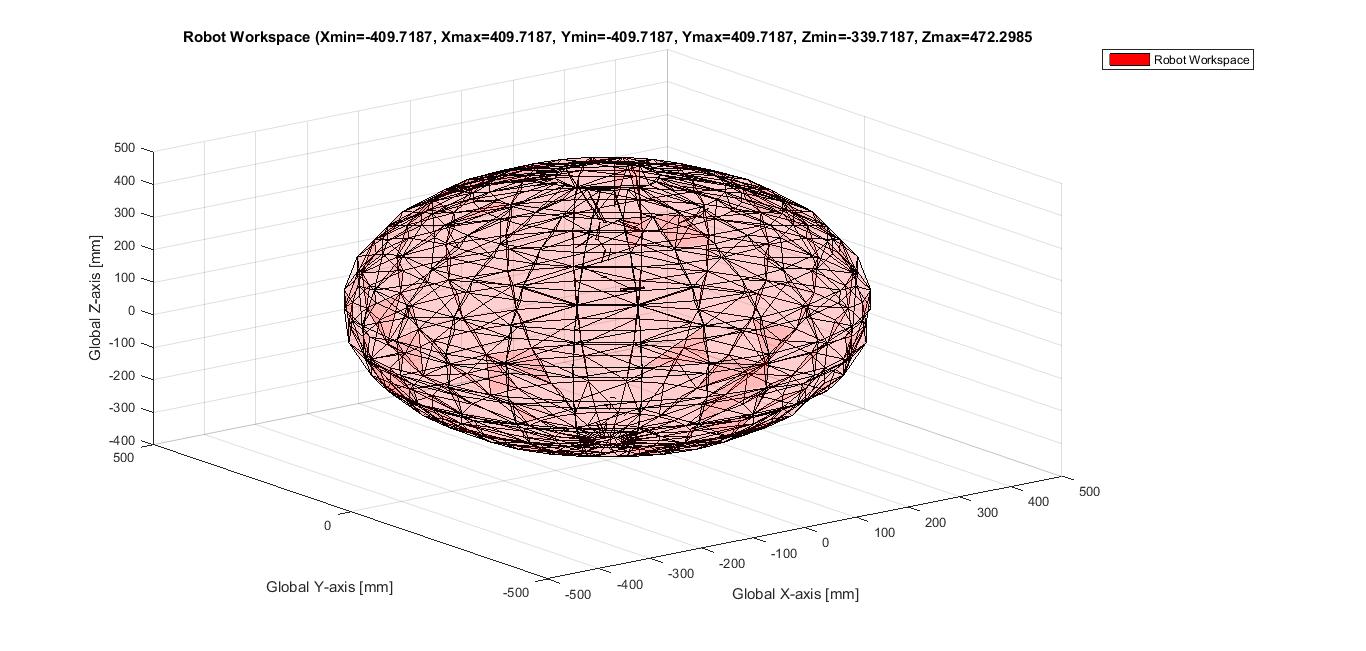
тобы нарисовать трехмерное рабочее пространство нашего робота-манипулятора, мы запускаем наш код MatLab, в котором мы определяем ограничивающие углы различных суставов.

Рис. 13. Рабочее пространство манипулятора
7. 3D-моделирование робота-манипулятора
Я

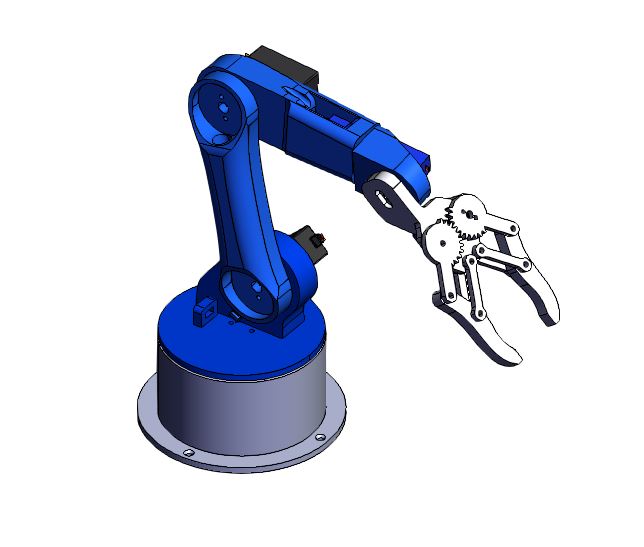 спроектировал манипулятора робота с помощью программного обеспечения для 3D-моделирования Solidworks. Манипулятор имеет 5 степеней свободы при соблюдении размеров таблицы 1. Для облегчения управления соединениями мы подключим сервоприводы. Для первых 3 осей, талии, плеча и локтя, мы использовали сервоприводы MG996R (черный), а для других 2 осей, поворота запястья и шага запястья, а также для захвата мы использовали микросервоприводы меньшего размера SG90 (синий).
спроектировал манипулятора робота с помощью программного обеспечения для 3D-моделирования Solidworks. Манипулятор имеет 5 степеней свободы при соблюдении размеров таблицы 1. Для облегчения управления соединениями мы подключим сервоприводы. Для первых 3 осей, талии, плеча и локтя, мы использовали сервоприводы MG996R (черный), а для других 2 осей, поворота запястья и шага запястья, а также для захвата мы использовали микросервоприводы меньшего размера SG90 (синий).Рис. 14. А Рис. 14. Б
На рисунках 14 А и Б показан робот-манипулятор с разных ракурсов.
Сервопривод (сервомашинка) состоит из двигателя постоянного тока и электроники, которая обеспечивает замкнутый контур для управления углом поворота вала двигателя. Управляющий сигнал для сервопривода подается в виде импульсов переменной ширины, соответствующих желаемому углу поворота. Для поддержания заданного положения сигнал должен быть периодическим с частотой от 50 до 100 Гц. Максимальное значение угла поворота может варьироваться в зависимости от модели сервопривода.
Заключение
В данной курсовой работе представлено моделирование, кинематическое и динамическое исследование робота-манипулятора с 5 степенями свободы. Мы уделяем больше внимания обратным точкам в кинематике и динамике, чтобы решить проблему во время моделирования. Кроме того, во время 3D-моделирования робота мы внедрили сервоприводы, которые будут разработаны в другой курсовой работе, в процесс системы управления.
Приложение
При разработке проекта, в дополнение к ранее упомянутым, также использовалось программное обеспечение Maple, пакет коммерческих математических приложений для общего пользования, который сочетает в себе язык программирования с интерфейсом, позволяющим пользователям писать математические формулы, используя традиционные математические обозначения. Это сделало численный и символьный расчет используемых матриц и уравнений более простым и быстрым.
Список используемой литературы
-
Яцун, С.Ф. Математическое моделирование плавающего робота / С.Ф.
Яцун, П.А. Безмен, Г.В. Климов, и др. // Управляемые вибрационные технологии и машины. Ч. 2. Курск: Курский государственный технический университет, 2010. – С. 265-269.
-
Кинематическое и динамическое исследование робота-манипулятора //
poznayka.org: сайт. – URL: https://poznayka.org/s111162t2.html (дата обращения: 10.02.2023). – Текст: электронный.
-
Булгаков А.Г. Промышленные роботы. Кинематика, динамика, контроль
и управление. Сер.: Библиотека инженера / А.Г. Булгаков, В.А. Воробьев. – М.: СОЛОНПРЕСС, 2007. – 488 с.
-
Alain Liégeois. Modélisation et commande des robots manipulateurs.
Techniques de l´ingénieur, page 3, Juin 2000.
-
M.Murray Richard, Zexiang Li, S.Shankar Sastry, and S.Shankara Sastry. A
Mathematical Introduction to Robotic Manipulation. CRC Press, 1994.
-
Cossalter, Vittore (2006). Meccanica applicata alle macchine, Libreria
Progetto, Padova, 5 edizione.